
The gauge transformation of the modified KP hierarchy
- DOI
- 10.1080/14029251.2018.1440743How to use a DOI?
- Keywords
- mKP hierarchy; gauge transformation; tau function
- Abstract
In this paper, we firstly investigate the successive applications of three elementary gauge transformation operators Ti with i = 1,2,3 for the mKP hierarchy in Kupershmidt-Kiso version, and find that the gauge transformation operators Ti can not commute with each other. Then two types of gauge transformation operators TD and TI constructed from Ti are proved that they can commute with each other. In particular, TI is introduced for the first time in the literature. And the successive applications of TD and TI in the form of T(n,k), which is the product of n terms of TD and k terms of TI, are derived in three cases for different n and k. At last, the corresponding successive applications of TD and TI on the eigenfunction Φ, the adjoint eigenfunction Ψ and the tau functions τ0 and τ1 are considered.
- Copyright
- © 2018 The Authors. Published by Atlantis Press and Taylor & Francis
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. Introduction
The modified Kadomtsev-Petviashvili (mKP) hierarchy is a system of nonlinear differential equations satisfied by the tau functions introduced in the early 1980s in [14, 15]. There are several versions of the Lax representations for mKP hierarchy. All the definitions are trying to transfer the relationship between KdV and mKdV to the KP situation. The first one is known as the nonstandard integrable system, developed by B. A. Kupershmidt and K. Kiso [16–18, 26], which is defined through the modification of the KP hierarchy (“standard case”)
The gauge transformation [2, 26, 27], also called Darboux transformation, provides a simple way to construct solutions for integrable hierarchies. By now, the gauge transformations of many integrable hierarchies have been studied, for example, the KP and mKP hierarchies [1–3, 9, 26, 27, 29, 30, 34], the BKP and CKP hierarchies [4, 10, 12, 25], the discrete KP and modified discrete KP hierarchies [13, 20, 21, 24, 28], the q−KP and modified q-KP hierarchies [5, 11, 22, 23, 33] and so on. Here in this paper, we will investigate the gauge transformation of the mKP hierarchy in Kupershmidt-Kiso version. There are three elementary gauge transformation operators Ti with i = 1, 2, 3 (see Section 3 for more details) for the mKP hierarchy [26, 29, 30]. Here we find that Ti with i = 1, 2, 3 can not commute with each other and therefore they are inconvenient in the application. Thus two types of gauge transformation operators TD [26] and TI constructed from Ti (see Section 4 for more details) are introduced, which are proved that they can commute with each other. And in particular, as far as I know, TI is introduced for the first time in the literature. These gauge transformation operators can not only construct various solutions, but also provide the understanding of the inner structures of the mKP hierarchy, for example, the explicit forms of the tau functions for the mKP hierarchy in Kupershmidt-Kiso version. The main content of this paper is devoted to the successive applications of TD and TI.
In the KP case, there are two elementary gauge transformation operators, denoted by Td and Ti. As for the successive applications of n terms of Td and k terms of Ti, it is enough to only discuss two cases of n > k and n = k in the KP hierarchy [9], since the case k > n can be derived from the commutativity of Td and Ti, and also the fact that the inverse of the conjugation of Td is Ti and vice versa. However in the mKP case, the inverse of the conjugation of TD is not equal to TI and vice versa. Therefore in the mKP case, if we denote the product of n terms of TD and k terms of TI as T(n,k), all three cases for different n and k should be considered in the successive applications of TD and TI. Thus the derivation of T(n,k) in the case of k > n can not be avoided, which is one of the major differences from the corresponding results in the KP hierarchy. In addition, we give the detailed derivations of the assumption of the form of T(n,k). But just knowing the assumed form of T(n,k) is not enough in the derivations of explicit form of T(n,k). Actually, besides the similar conditions of TD and TI (see (4.3)) to the KP case, the additional conditions (see (4.4)) are very crucial in this paper, which is another difference from those in the KP case. At last, the corresponding successive applications of TD and TI on the eigenfunction Φ, the adjoint eigenfunction Ψ and the tau functions τ0 and τ1 are considered. And some examples of τ0 and τ1 are given.
This paper is organized in the following way. In Section 2, some basic facts about the mKP hierarchy are introduced. The successive applications and the commutativity of the elementary gauge transformation operators Ti with i = 1, 2, 3 are discussed in Section 3. Then in Section 4, the successive applications of the gauge transformation operators TD(Φ) and TI(Ψ) are investigated in three cases for different n and k. Further the application on the (adjoint) eigenfunctions and the tau functions are obtained in Section 5. At last in Section 6, some conclusions and discussions are given.
2. the mKP hierarchy
The mKP hierarchy in Kupershmidt-Kiso version [16–18, 26] is defined as the following Lax equation
Here ∂ = ∂x and ui = ui(t1 = x, t2, ⋯). The algebraic multiplication of ∂i with the multiplication operator f is given by the usual Leibnitz rule
In this paper, for any (pseudo-) differential operator A and a function f, the symbol A(f) will indicate the action of A on f, whereas the symbol Af will denote just operator product of A and f, and * stands for the conjugate operation: (AB)* = B*A*, ∂* = −∂, f* = f. Note that there is the term u0 in the Lax operator L (see (2.2)) of the mKP hierarchy, which is different from the case of the KP hierarchy.
Similar to the case of the KP hierarchy, the Lax operator L for the mKP hierarchy can be expressed in terms of the dressing operator Z,
Then the Lax equation (2.1) is equivalent to
Define the wave and the adjoint wave functions of the mKP hierarchy in the following way:
Then w(t, λ) and w*(t, λ) satisfy the bilinear identity [32] below
It is proved in [32] that there exist two tau functionsa τ1 and τ0 for the mKP hierarchy in Kupershmidt-Kiso version such that
By comparing (2.11) with (2.14), one can find
The eigenfunction Φ and the adjoint eigenfunction Ψ of the mKP hierarchy are defined in the identities below,
3. Elementary Gauge Transformation
In this section, we will investigate the elementary gauge transformation of the mKP hierarchy. For the mKP hierarchy (2.1), suppose T is a pseudo-differential operator, and
Lemma 3.1.
If the pseudo-differential operator T satisfies
Before the construction of the gauge transformation, the following basic identities on the pseudo-differential operator are needed.
Lemma 3.2.
For any pseudo-differential operator A and arbitrary functions f, f1, f2, g, g1 and g2, one has the following operator identities:
Proof. (3.4), (3.5), (3.7) and (3.8) can be found in [26, 27]. (3.9) can be obtained by direct computation. Therefore, we only prove (3.6) here. By using (3.8)
After the preparation above, one can find the following proposition [26, 29, 30] about the mKP hierarchy by using Lemma 3.1 and Lemma 3.2.
Proposition 3.1.
There are three elementary gauge transformation operators for the mKP hierarchy, that is,
Further, one can obtain the following proposition.
Proposition 3.2.
Under the gauge transformation operator T1(Φ), T2(Φ) and T3(Ψ), the objects in the mKP hierarchy are transformed in the way shown in Table I.
|
|
Z(1) = |
|
|
|
|
|---|---|---|---|---|---|
| T1 = Φ− 1 | Φ− 1Z | Φ− 1Φ1 | ΦΨ1 | τ0 | Φτ1 |
|
|
|
|
|
τ1 |
|
|
|
|
|
|
|
τ0 |
Elementary gauge transformations mKP → mKP
where Φ1 and Ψ1 are the different eigenfunction and the adjoint eigenfunction of LmKP from the generating functions Φ and Ψ of the gauge transformation operators.
Proof. Here we only take T2 as an example and the others can be derived in the similar way. The actions of T2 on Z, Φ1 and Ψ1 can be obtained by direct computation. Therefore we mainly focus on the actions on τ0 and τ1. Firstly, from
Then by (2.16), one can find
Therefore according to (2.16) and (3.14),
Remark: Note that in [29, 30], there is another gauge transformation operator
Denote the successive applications of gauge transformation operators Ti with i = 1, 2, 3 as
Here Φi and Ψi are the eigenfunctions and the adjoint eigenfunctions of the mKP hierarchy which are different from each other,
Proposition 3.3.
(1)
(2)
(3)
Proof. (1)
(2) Assume
Thus
The substitution of (3.25) for
(3) Firstly, we can prove that
Then by comparing the fact
Therefore
Assume L be the Lax operator of the mKP hierarchy, Φ1 and Φ2 be two nonzero independent eigenfunctions, and Ψ1 and Ψ2 be two independent adjoint eigenfunctions. we consider the following diagram
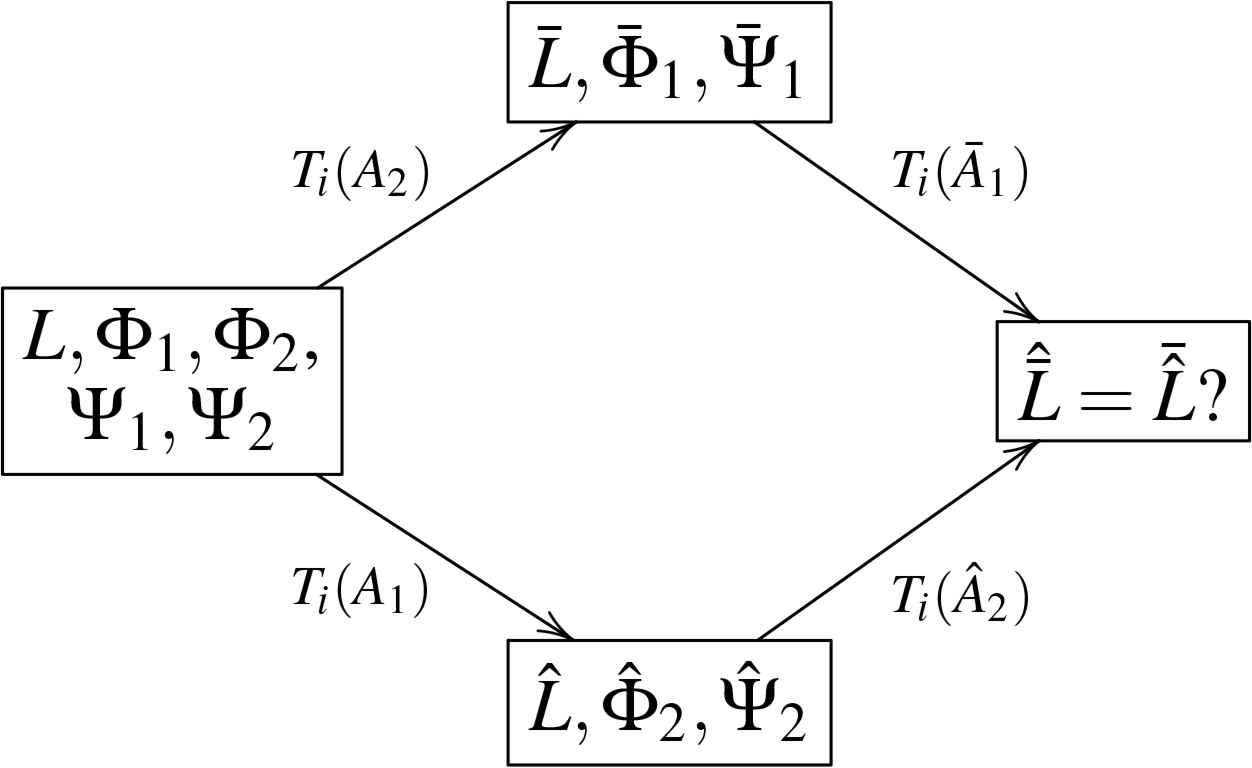
where i = 1, 2, 3 and
The question is whether this diagram will commute, i.e.
In fact, according to Proposition 3.3,
Therefore, the Bianchi diagrams for Ti, i = 1, 2, 3 does not commute. Further, according to Proposition 3.2, one can also find that
So Ti with i = 1, 2, 3 can not commute with each other, that is,
This fact tells us that the gauge transformation operators Ti with i = 1, 2, 3 are not convenient when solving the mKP hierarchy. Thus we must seek the other kinds of gauge transformation operators which can commute with each other in the mKP hierarchy, that is, TD(Φ) and TI(Ψ).
4. Gauge Transformation operators TD(Φ) and TI(Ψ)
Since 1 is the eigenfunction of the mKP hierarchy (see (2.17)), one can define
Here TD is introduced in [26], while as far as I know TI is presented for the first time in the literature. Then by the direct computation similar to Proposition 3.2, one can obtain the following proposition.
Proposition 4.1.
Under the gauge transformation operator TD(Φ) and TI(Ψ), the objects in the mKP hierarchy are transformed in the way shown in Table II.
|
|
Z(1) = |
|
|
|
|
|---|---|---|---|---|---|
| TD(Φ) | TD(Φ)Z∂− 1 |
|
|
Φτ1 |
|
| T1(Ψ) | T1(Ψ)Z∂ |
|
|
|
|
gauge transformations TD(Φ) and TI(Ψ)
According to Table II, one finds that
It can be proved that TD(Φ) and TI(Ψ) are commute with each other, i.e.,
Therefore, TD(Φ) and TI(Ψ) are more applicable in the case of the mKP hierarchy.
Consider the following chain of the gauge transformation operators TD(Φ) and TI(Ψ)
Denote
Next, we will compute the explicit form of T(n,k) in terms of Φi and Ψi. Before this, the lemma below is needed.
Lemma 4.1.
T(0, k) and T(n,0) have the following form
Proof. This lemma can be proved by induction. Here we only prove the first identity, since the second one is almost the same. Assume this lemma holds for k − 1, then according to (3.9) and Table II
The generalized Wronskian determinant [9] is needed in the next propositions, which is defined in the following form
In particular,
Proposition 4.2.
When n > k, T(n,k) and (T(n,k)) − 1 have the following forms
Here the determinant of T(n,k) is expanded by the last column and the functions are on the left-hand side. And when computing (T(n,k))−1, the determinant of (T(n,k)) − 1 is expanded by the first column and the functions are on the right-hand side, and also the coefficient function before the determinant should be placed after the operators Φi∂ − 1.
Proof. When n > k, according to (4.8) and the commutativity of TD and TI given in (4.5)–(4.7), one can rewrite T(n,k) as
Then by using Lemma 3.2 and Lemma 4.1, and also the fact
Thus T(n,k) and (T(n,k)) − 1 have the following forms
Then from Table II, one can find
On the other hand, (4.21), (4.22) and Table II can lead to
Thus
By the same manner as the case n > k, one can show that T(n,n) and (T(n,n))−1 have the similar forms
Proposition 4.3.
When n = k, T(n,k) and (T(n,k)) − 1 have the following forms
Here the determinant of T(n,k) is expanded by the last column and the functions are on the left-hand side. And when computing (T(n,k))−1, the determinant of (T(n,k)) − 1 is expanded by the first column and the functions are on the right-hand side, and also the coefficient function before the determinant should be placed after the operators Φi∂− 1.
As for the case n < k, one has the proposition below.
Proposition 4.4.
When n < k, T(n,k) and (T(n,k)) − 1 have the following forms
Here the determinant of T(n,k) is expanded by the last column and the functions are on the left-hand side. And when computing (T(n,k)) − 1, the determinant of (T(n,k)) − 1 is expanded by the first column and the functions are on the right-hand side, and also the coefficient function before the determinant should be placed after the operators Φi∂− 1 and ∂i.
Proof. Firstly when n < k, T(n,k) and (T(n,k))−1 have the following forms
Therefore
By solving this equation, (4.33) can be derived. And also by using
On the other hand, from (4.38), (4.41) and Table II,
Then
5. Applications of T(n,k)
In the last section, the explicit forms of T(n,k) have been obtained. In this section, we will investigate the applications of the above explicit formulas.
Firstly, let’s consider the applications of T(n,k) on the eigenfunction and adjoint eigenfunction of the mKP hierarchy. We summarize the corresponding results in the next proposition.
Proposition 5.1.
Under the successive gauge transformation T(n,k), the eigenfunction Φ (which is not proportional to Φ1, ⋯, Φn in T(n,k)) and the adjoint eigenfunction Ψ (which is not proportional to Ψ1, ⋯, Ψk in T(n,k)) of the mKP hierarchy will become into
- •
when n > k,
- •
when n = k
- •
when n < k
Proof. These results can be obtained by substituting (4.14), (4.15), (4.31), (4.32), (4.33) and (4.34) into the following expressions
Proposition 5.2.
Under the successive gauge transformation T(n,k), the tau functions τ0 and τ1 of the mKP hierarchy will be changed into
- •
when n ≥ k
- •
when n < k
Proof. Here we only give the proof for the case of n ≥ k, since the proof in the other case is almost the same. For this, assume
Then through (4.14) and (4.31), one can find
Further from the transformation
Then according to (5.14) and the relation between τ0 and τ1 given in (2.16), one can find
Therefore by (2.16), (5.14) and (5.16),
In order to obtain the explicit examples of τ0 and τ1, we start from the zero solution, i.e., L(0) = ∂, which satisfies (2.1). One can easily find that in this case, the mKP hierarchy in Kupershmidt-Kiso version coincides with the usual KP hierarchy. Denote
Then according to Proposition 5.2 and [9], one has the following results
Proposition 5.3.
Starting from the zero solution of the mKP hierarchy, i.e., L(0) = ∂, the tau pair (τ0(n +k), τ1(n +k)) of the mKP hierarchy is showed as follows.
- •
when n ≥ k,
- •
when n < k
Thus
Corollary 5.1.
Starting from L(0) = ∂, the tau pair
Remark: the above results can help us to understand the tau pair (τ0, τ1) of the mKP hierarchy in Kupershmidt-Kiso version.
6. Conclusions and Discussions
The elementary gauge transformation operators Ti with i = 1, 2, 3 (see Proposition 3.1) are discussed in Section 2. The actions of Ti on the dressing operator, the (adjoint) eigenfunctions and the tau functions are presented in Proposition 3.2. Then the successive applications of gauge transformation operators Ti are shown in Proposition 3.3. At the end of Section 2, Ti are proved that they can not commute with each other (see (3.37)), which reflects that Ti are not easy to carry out for the mKP hierarchy.
Therefore TD and TI (see (4.1) and (4.2)) are introduced in Section 3. And in particular, as far as I know, TI is introduced for the first time in the literature. After that, how the objects of the mKP hierarchy are transformed under TD and TI are listed in Proposition 4.1. And further based upon the results in Proposition 4.1, TD and TI are shown that they can commute with each other (see (4.5)–(4.7)) and hence they are more applicable in the mKP hierarchy than Ti with i = 1, 2, 3. Then the main part of Section 3 is devoted to the successive applications of TD and TI. And the products of n terms of TD and k-terms of TI, denoted as T(n,k), are given in Proposition 4.2 for n > k, Proposition 4.3 for n = k and Proposition 4.4 for n < k. At last, the actions of T(n,k) on the eigenfunction Φ, the adjoint eigenfunction Ψ and the tau functions τ0 and τ1 are presented in Proposition 5.1 and 5.2 Also the explicit forms of tau functions τ0 and τ1 are given in Proposition 5.3 and Corollary 5.1.
Compared with the KP hierarchy, there are several differences in the mKP hierarchy, which brings much difficulty to the study of the mKP hierarchy. 1) There is the second high order term in the Lax operator of the mKP hierarchy (see u0 in (2.2)), which leads to the extra condition (see (4.4)) to determine T(n,k). 2) The inverse of the conjugation of TD is not TI and vice versa. Therefore, the case k > n must be discussed in the derivation of T(n,k). In fact, it is more difficult in the case k>n than the cases n>k and n = k, because it is very hard to determine the form of T(n,k) in the case k > n. 3) There are two tau functions τ0 and τ1 in the mKP hierarchy. Usually, it is more inconvenient to study the integrable systems with two tau functions than those with only one single tau function. Hence, additional methods must be developed in the discussion of the tau functions under the successive applications of TD and TI for the mKP hierarchy.
At last, the results in this paper are hoped to be generalized to the constrained mKP hierarchy. Also these results may be helpful to discuss the inner integrability of the mKP hierarchy such as the additional symmetries and the squared eigenfunction symmetries.
Acknowledgments
This work is supported by the Fundamental Research Funds for the Central Universities (Grant No. 2015 QNA 43).
Footnotes
Please note that the mKP hierarchy that we consider is the Kupershmidt-Kiso version, which is different from from those in L. A. Dickey’s work about mKP hierarchy [8]. The existence of τ1 and τ0 makes the mKP hierarchy in Kupershmidt-Kiso version become a relatively separate system, just like the KP hierarchy.
References
Cite this article
TY - JOUR AU - Jipeng Cheng PY - 2021 DA - 2021/01/06 TI - The gauge transformation of the modified KP hierarchy JO - Journal of Nonlinear Mathematical Physics SP - 66 EP - 85 VL - 25 IS - 1 SN - 1776-0852 UR - https://doi.org/10.1080/14029251.2018.1440743 DO - 10.1080/14029251.2018.1440743 ID - Cheng2021 ER -