
Symmetry Reduction of Ordinary Differential Equations Using Moving Frames
- DOI
- 10.1080/14029251.2018.1452671How to use a DOI?
- Keywords
- Canonical variables; differential invariants; equivariant moving frames; Lie point symmetries; ordinary differential equations
- Abstract
The symmetry reduction algorithm for ordinary differential equations due to Sophus Lie is revisited using the method of equivariant moving frames. Using the recurrence formulas provided by the theory of equivariant moving frames, computations are performed symbolically without relying on the coordinate expressions for the canonical variables and the differential invariants occurring in Lie’s original procedure.
- Copyright
- © 2018 The Authors. Published by Atlantis and Taylor & Francis
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. Introduction
Lie group integration techniques are amongst the most effective methods available for obtaining analytic solutions of nonlinear differential equations. Nowadays, there are many excellent textbooks surveying the subject, [3,5–8,10,15–17,27,35–37]. Following Sophus Lie’s seminal ideas, most symmetry-based integration methods rely on the infinitesimal symmetry generators of the differential equation under consideration. For example, given an nth order ordinary differential equation with one infinitesimal symmetry generator, there is a well known procedure for reducing the order of the equation by one by introducing canonical variables that rectify the infinitesimal symmetry generator. More generally, if the differential equation admits an r-dimensional solvable symmetry group, then the equation can be reduced to an order n−r differential equation, assuming n > r. Given a solution to the reduced equation, the solution to the original differential equation can then be recovered by quadrature.
To find the canonical variables (t, s) that rectify an infinitesimal symmetry generator, a system of first order linear partial differential equations must be solved. Once the canonical variables have been found, the order of the differential equation is reduced by re-expressing the equation in those new coordinates and introducing the new dependent variable w = st. For r-dimensional solvable symmetry groups, this procedure is repeated r times. At each iteration, one must keep track of the coordinate expressions of the prolonged infinitesimal symmetry generators in the new system of coordinates in order to compute the subsequent set of canonical variables to be introduced in the following iterations. For large symmetry groups, these coordinate dependent computations can become cumbersome and thereby limit the scope of the method. The main goal of the present paper is to present a symbolic implementation of Lie’s symmetry reduction procedure for ordinary differential equations that does not rely on the coordinate expressions of the canonical variables and the differential invariants occurring in the standard implementation of the method. The constructions introduced are completely algorithmic and can therefore directly be implemented in symbolic computer packages such as
This paper is part of recent efforts aimed at developing new symbolic computational tools for differential equations based on the method of equivariant moving frames. Recent developments have occurred in the calculus of variations, [19,38], the computation of conservation laws, [12–14], the theory of geometric curve flows, [4,23,24,29], the classification of differential invariants and their syzygies, [9,33], the symmetry classification problem of differential equations, [21], the general equivalence problem of differential equations, [25,41], and the method of group foliation, [22,39]. For a comprehensive overview of modern applications of the method of equivariant moving frames, we refer the reader to [22,31].
For one-dimensional symmetry groups, our symbolic implementation of the symmetry reduction algorithm is based on the standard implementation of the equivariant moving frame method, [11,22]. For solvable symmetry groups, we use the inductive/recursive moving frame constructions introduced in [18,30,34,40] as group parameters are recursively normalized each time the order of the differential equation is reduced. As a byproduct, the ideas developed in this paper provide a new and nontrivial application of the inductive and recursive moving frame implementations introduced in [18,30,34,40]. When compared to the group foliation method developed in [22,39], where group parameters are normalized all at once, the recursive approach proposed in this paper offers several benefits. Firstly, as illustrated in [15], it is possible that one of the intermediate equations obtained during the reduction process is easier to solve than the final reduced equation. This situation can occur if, for example, one of the intermediate equations admits (type II) hidden symmetries, [1,20]. In this case, since the group foliation method only computes the final reduced equation, it would miss the intermediate reduced equation that allows to solve the original differential equation more easily. Secondly, in the implementation of the group foliation method, it is not clear which normalizations will produce the simplest reduced equation. On the other hand, when group parameters are normalized recursively, the reduced equation obtained at each stage of the symmetry reduction process can help make educated normalizations that will lead to the simplest reduced differential equation. Finally, in contrast to the group foliation method introduced in [22], our approach does not require the introduction of a “computational variable” when the independent variable is not an invariant of the group action. Avoiding the introduction of computational variables is generally desirable as these tend to lead to more complicated differential equations and also require the introduction of a “companion equation”, which leads to the problem of solving a system of differential equations rather than just the original equation.
Given the solution to the fully reduced differential equation, we introduce a recursive reconstruction procedure for recovering the solution to the original differential equation. As in the reduction step, the reconstruction computations are performed symbolically without requiring coordinate expressions for the invariants introduced during the reduction process. To implement the reconstruction procedure, the main data required is the induced action of the various one-parameter groups on the invariants at each step of the reduction process. As it will be shown in Section 5.2, these one-parameter group actions (more precisely their corresponding infinitesimal generators a) can be deduced symbolically using the recurrence relations provided by the theory of equivariant moving frames, [11,19,32].
For completeness, we begin in Section 2 by recalling standard notation and basic definitions pertaining to ordinary differential equations and symmetry groups. Lie’s symmetry reduction algorithm for ordinary differential equations is then reviewed in Section 3, and the basic equivariant moving frame constructions are laid out in Section 4.1. In particular, the recurrence formulas for the normalized differential invariants are introduced. These equations provide a complete characterization of the structure of the algebra of differential invariants and their syzygies. An important aspect of these equations is that they can be obtained symbolically without relying on the coordinate formulas of the differential invariants or the moving frame. In Section 4.2, the inductive/recursive implementation of the moving frame method is introduced. Using the method of moving frames, Lie’s symmetry reduction algorithm for one-dimensional symmetry groups is revisited in Section 5.1, and the general case for solvable symmetry groups is considered in Section 5.2.
2. Preliminaries
Let
Definition 2.1.
An nth order ordinary differential equation is the zero locus of a differential function
Definition 2.2.
An ordinary differential equation Δ(x,u(n)) = 0 is said to be regular if its differential dΔ ≠ 0 does not vanish on the domain of definition of the equation. A differential equation is locally solvable at the point
In the following, we only consider fully regular ordinary differential equations. Now, let
Definition 2.3.
A one-parameter Lie group Gε is said to be a symmetry group of the fully regular ordinary differential equation (2.2) if for every gε ∈ Gε
Remark 2.1.
The above exposition easily extends to systems of ordinary differential equations involving several dependent variables u = (u1,…,uq). Also, the one-parameter group Gε in Definition 2.3 can, in general, be replaced by an r-dimensional Lie group G.
3. Symmetry Reduction
We now review Lie’s symmetry reduction algorithm for an ordinary differential equation invariant under a one-parameter symmetry group, [3,5–8,10,15–17,27,35–37]. Therefore, let Δ(x,u(n)) = 0 be an ordinary differential equation invariant under the infinitesimal symmetry generator (2.3). The standard symmetry reduction algorithm is based on the introduction of a set of canonical variables
Assuming w = w(t) is the general solution of the reduced equation (3.4), we have that
As it is well known, the above reduction procedure can be iterated for multi-parameter solvable symmetry groups. Since there are different, yet equivalent, definitions of solvable Lie groups, we now introduce the definition used in the paper, which can be found in [27].
Definition 3.1.
Let G be an r-dimensional Lie group with Lie algebra
Assuming Δ(x, u(n)) = 0 is invariant under an r-dimensional solvable symmetry group G, the solvable structure of the symmetry group G will dictate the order in which symmetry reduction should by performed. After the introduction of a convenient basis { v1,…vr} for
The overall process can be computationally demanding as each time the order is reduced, new canonical variables are computed and the prolonged infinitesimal symmetry generators have to be re-expressed in these new coordinates. In Section 5, we will show how these coordinate dependent computations can be avoided using the method of moving frames. But before doing so, we illustrate Lie’s symmetry reduction algorithm with a simple example. This will allow us to compare the standard implementation to the moving frame implementation introduced in Section 5.
Example 3.1.
To illustrate Lie’s symmetry reduction procedure, we consider the second order ordinary differential equation
Expressing the first order prolonged infinitesimal generator
4. Moving Frames
We now introduce the moving frame constructions that will be used in the symbolic implementation of the symmetry reduction process introduced in Section 5. In Section 4.1, we first survey the standard implementation of the equivariant moving frame method as originally introduced in [11]. In Section 4.2, we review the inductive/recursive implementation of the moving frame method developed in [18,30,34,40].
4.1. Standard implementation
Let G be an r-dimensional Lie group acting smoothly on the nth order jet space J(n). A right moving frame is a G-equivariant map ρ: J(n) → G, where G-equivariance means that
The main existence theorem states that a moving frame exists in the neighborhood of a point (x, u(n)) ∈ J(n) provided the action is (locally) free and regular on that neighborhood. We recall that the action is free at a point (x, u(n)) if the isotropy group
The construction of a moving frame is based on the introduction of a cross-section
Example 4.1.
To illustrate the moving frame construction, we consider the two-parameter group action
To proceed further, we introduce the nth order lifted bundle
Definition 4.1.
The lift of a differential function
We observe that the lifted function (4.7) is invariant under the lifted action (4.6). We therefore refer to (4.7) as a lifted invariant. In particular, lifting the jet coordinates (x, u(n)):
The lift map λ extends to differential forms, and we refer to [11] for more detail. For the purpose of this paper, it is enough to know that, modulo the contact forms (2.1), the lift of the horizontal form dx is
Given a right moving frame ρ: J(n) → G, we introduce the right moving frame section
Definition 4.2.
Let ρ: J(n) → G be a right moving frame. The invariantization map is defined as
Invariantizing a differential function
The invariantization of the horizontal form dx is the contact-invariant d horizontal one-form
Example 4.2.
Continuing Example 4.1, the invariantization of the jet coordinates ux and uxx yields the differential invariants
One of the most important results from the theory of equivariant moving frames is the introduction of the universal recurrence relations for the lift map and the invariantization map. These equations can be used to perform many computations symbolically without requiring coordinate expressions for the lifted or normalized invariants. The universal recurrence relations have played a fundamental role in the development of the group foliation method, [22,39], the theory of invariant variational bicomplexes, [19,38], the study of invariant geometric curve flows, [24], the characterization of the algebra of differential invariants, [33], the development of the recursive moving frame construction, [30,34], and many other problems in applied mathematics, [31]. In order to introduce these recurrence formulas, let
Remark 4.1.
The lifted recurrence relations (4.15) can be computed symbolically without relying on the coordinate expressions of the lifted invariants, the lifted horizontal form ω, and the MaurerCartan forms μ1,…,μr. The only data required are the expressions for the infinitesimal generators v1, …,vr, and their prolongation. Similarly, the invariantized recurrence relations (4.16) can be computed symbolically without knowing the coordinate expressions of the right moving frame ρ(x, u(n)). Indeed, using the recurrence relations for the phantom invariants (4.10), one can solve for the normalized Maurer-Cartan forms v1,…,vr. Substituting these expressions into the remaining recurrence relations provides symbolic expressions for the differential of the non-phantom normalized invariants.
Example 4.3.
To illustrate the above considerations, we consider the group action (4.2) with infinitesimal generators (3.9). First, the recurrence relations for the lifted invariants are
Solving for the normalized Maurer-Cartan forms v1, v2 using the first two equations in (4.18) we find that
4.2. Inductive/recursive implementation
We now review the inductive/recursive implementation of the moving frame method as introduced in [18,30,34,40]. The idea behind the inductive/recursive implementation is to take into account the existence of a smaller subgroup N ⊂ G for which a moving frame and its normalized differential invariants have already been constructed, and use this information to streamline the construction of a moving frame for the larger group G and the computation of its normalized differential invariants. To this end, let
For convenience, let
Assuming the prolonged action of N on the nth order jet space J(n) is free and regular, let ρN : J(n) → N be the right moving frame induced by the coordinate cross-section
Since G is assume to act freely and regularly on J(n), the quotient group G / N acts freely and regularly on the cross-section
Example 4.4.
As a simple example of the above considerations, we reconsider Examples 4.1 and 4.2, and recover the invariants (4.12) inductively. The one-parameter group N = Gɛ1 with group action
Now, the 2-parameter group G = G(ɛ1, ɛ2) acts on the Gɛ1-normalized invariants (4.29) according to
To perform the computations symbolically, we now apply the above inductive constructions to the recurrence formulas (4.15). Following the decomposition (4.20), let
On the other hand, pulling-back the G-lifted recurrence relations by the map (4.25) induced by the partial moving frame
Example 4.5.
Continuing Example 4.4, the recurrence relations for the G-lifted invariants are given in (4.17). Pulling-back theses equation by the inclusion map we obtain the
Now, pulling-back the G-lifted recurrence relations (4.17) by the partial moving frame (4.30) we obtain the recurrence relations
The lifted recurrence relations (4.36) in Example 4.5, will play an important role in our symbolic implementation of the symmetry reduction algorithm introduced in Section 5. As previously emphasized, the recurrence formulas (4.36) can be obtained symbolically without requiring the coordinate expressions for the Gɛ2-lifted invariants
5. Symmetry Reduction Using Moving Frames
In this section we revisit the symmetry reduction algorithm presented in Section 3 using the moving frame machinery introduced in Section 4. By taking advantage of the recurrence formulas (4.16) for the normalized invariants, computations are performed symbolically without relying on the coordinate expressions for the canonical variables, the differential invariants, and the moving frame.
5.1. One-parameter symmetry group
As in Section 3, our starting point is an nth order ordinary differential equation
Given the moving frame ρ, we now introduce the canonical variables (t, s) appearing in Lie's symmetry reduction algorithm. At the group action level, the infinitesimal definition of the canonical variables given in (3.3) implies that t is an invariant of Gε while Gε acts on s by translations. In terms of the moving frame ρ, these coordinates can be given by
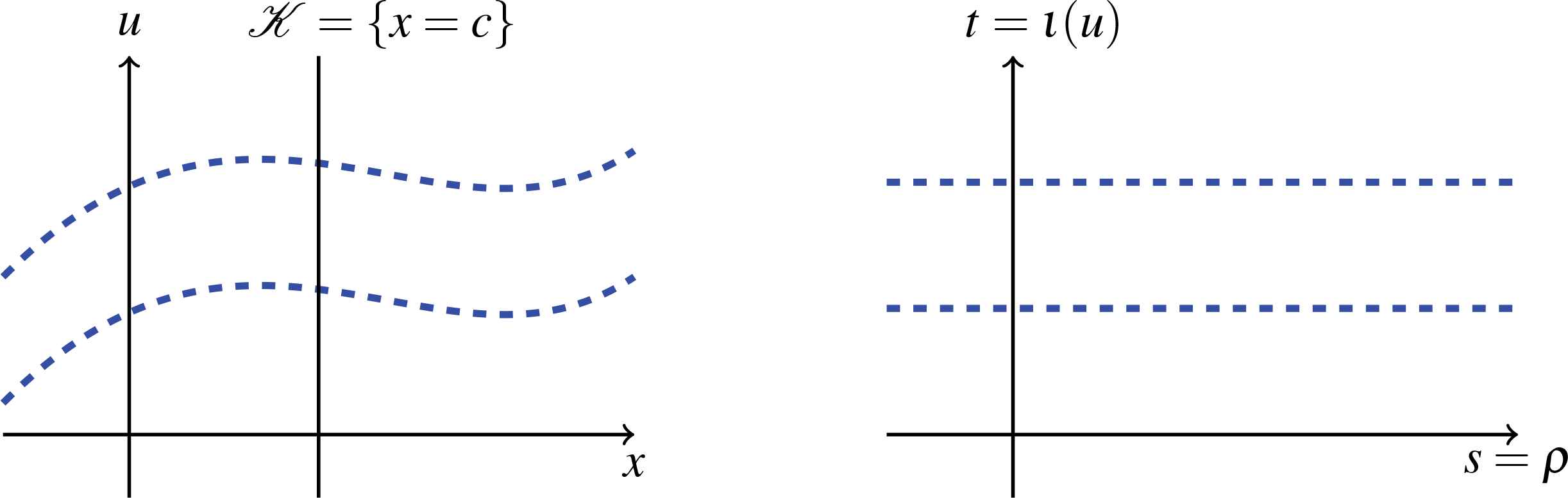
Rectification of the group orbits.
Without relying on the coordinate expressions of t and s, it is possible to compute the derivatives st, stt,…, symbolically. First, we have that
Assuming (5.10) can be solved, we now explain how to recover the solution to the original equation (5.1) without relying on the coordinate expressions of the canonical variables (t, s) (or w = st). We refer to this procedure as the reconstruction step. Let w = w(t) be the general solution to (5.10). Since st = w(t), it follows that
Before considering an example, let us summarize the steps involved in the symbolic implementation of the symmetry reduction process introduced above. Starting with the ordinary differential equation (5.1):
Compute a basis of infinitesimal symmetry generators following standard procedures, [3, 5–8,10,15–17,27,35–37]. Choose one infinitesimal symmetry generator v with respect to which the equation is to be reduced.
Let
Introduce the cross-section (5.4) and let ρ be the corresponding right moving frame. Note, it is not necessary to compute ρ! We only need to know that it exists.
Compute the recurrence relations for the normalized invariants
Introduce the canonical variables t = ı(u), s = ρ. Invariantizing the differential equation (5.1) and using the recurrence relations for the normalized invariants I(n), rewrite the equation in terms of t,
Solve the reduced equation
where
Example 5.1.
To illustrate the above constructions, consider the first order ordinary differential equation
5.2. Solvable symmetry group
To extend our symbolic implementation of the symmetry reduction algorithm to solvable symmetry groups, we use the inductive/recursive moving frame constructions outlined in Section 4.2. Our starting point is an nth order ordinary differential equation Δ(x, u(n)) = 0 invariant under the prolonged action of an r-dimensional solvable Lie group G with (3.5) as its chain of normal subgroups. Based on this chain of normal subgroups, we introduce the ℓth lifted subbundle
Prior to the implementation of the symmetry reduction algorithm, we first compute the recurrence relations (4.15) for the G-lifted differential invariants of order ≤ n − 1:
The recurrence relations for the Gɛ1-normalized differential invariants are then obtained by substituting (5.20) into the remaining recurrence relations, giving
Before proceeding to the second iteration, we recall from Section 5.1 that the normalized invariants
For the second iteration of the symmetry reduction algorithm, we consider the induced action of the one-parameter group Gɛ2 ≃ G(2) / G(1) on
Taking the inverse lift
With (5.26) in hand, we now implement the second iteration of the symmetry reduction procedure. Again, for simplicity, assume that t1 is not an invariant of the Gɛ2-action, and let
A new set of canonical variables is introduced by setting
The symmetry reduction procedure continues by considering the action of Gɛ3 on the submanifold jet bundle
At the end of the symmetry reduction algorithm, the fully reduced equation is the order n − r differential equation
Let wr(tr) be the solution to the fully reduced equation (5.29). We now reconstruct the solution to the original differential equation (5.1). By definition
Before considering two examples, let us summarize the above considerations into a list of executable steps. Our starting point is an nth order ordinary differential equation Δ(x, u(n)) = 0.
Compute a basis of infinitesimal symmetry generators using standard techniques, [3,5–8, 10,15–17,27,35–37].
Find a sufficiently large solvable Lie subalgebra
Compute the recurrence relations (4.15) for the G-lifted invariants of order ≤ n − 1.
Reduce the order of the differential equation Δ(x, u(n)) = 0 iteratively. For 1 ≤ ℓ ≤ r, the ℓth iteration consists of reducing the differential equationf
-Implement the inductive/recursive moving frame constructions with N = G(ℓ − 1) and G = G(ℓ) to obtain the lifted recurrence relations of the Gɛℓ action on
-Choose a cross-section
-Introduce the canonical variables tℓ, sℓ defined in (5.28), and compute
-Invariantize
Let wr(tr) be the solution to the fully reduced equation
-Evaluating
-Computing
using the Gɛr−ℓ+1-action on (tr−ℓ, wr−ℓ). This action is obtained symbolically from the Gɛr−ℓ+1-lifted recurrence relations computed in the (r − ℓ + 1)th reduction step as follows. From the lifted recurrence relationsextract the coefficientsExponentiating-Inverting tr−ℓ = tr−ℓ (tr−ℓ+1), and substituting tr−ℓ+1 = tr−ℓ+1 (tr−ℓ) into wr−ℓ (tr−ℓ+1), yields wr−ℓ (tr−ℓ+1(tr−ℓ)).
The output of the reconstruction process is the solution to the original differential equation Δ(x, u(n)) = 0.
Example 5.2.
We now revisit Example 3.1 using the moving frame machinery. We emphasize the fact that, this time around, computations are performed symbolically without relying on the coordinate expressions of the canonical variables and the differential invariants.
Since the differential equation is of order two, we consider the lifted recurrence relations (4.17) of the full symmetry group (4.2) up to order one. According to the solvable structure of the symmetry group, we first implement the symmetry reduction process using the one-parameter group Gɛ1. The recurrence relations for the Gɛ1-lifted invariants were obtained in (4.32). Choosing the crosssection (4.27), let ρ1 be the corresponding right moving frame and let l1 be the induced invariantization map. Using the same notation as in (4.29), the recurrence relations for the Gɛ1-normalized invariants are given in (4.35).
We now introduce the canonical variables
Now, let Gɛ2 act on
As in Example 3.1, assume F(−y) = y2. Then
Given (5.37), we now recover the solution to the original differential equation (3.15). Taking the inverse lift of the coefficients multiplying
Remark 5.1.
The choice of canonical variables is not unique. For example, in Example 3.1 the general solution to the system of differential equations (3.10) is
This freedom in the choice of the canonical variables also appears in the moving frame approach. First, the choice of the cross-section (4.27) is not unique. If it were replaced by
From a purely symbolic and computational standpoint, the symmetry reduction algorithm can be executed using solely the lifted recurrence relations of the the whole symmetry group G. Reviewing the general procedure outlined above, we notice that in the first iteration of the symmetry reduction algorithm, all computations can be carried out using the lifted recurrence relations for G provided the equalities are defined modulo the Maurer-Cartan forms μ2,…,μr. Similarly, in the second iteration, all computations hold modulo the Maurer-Cartan forms μ3,…,μr. In general, at the ℓth iteration, the first ℓ − 1 Maurer-Cartan forms μ1,…,μℓ − 1 will have been (partially) normalized and the symmetry reduction computations can be performed using the recurrence relations of the whole symmetry group provided the equalities are defined modulo the (partially normalized) Maurer-Cartan forms
Example 5.3.
Consider the second order ordinary differential equation
We now reduce (5.45) using the 1-parameter group Gɛ2 induced by the infinitesimal generator v2. From (5.44), we have that
We now recover the solution to the original differential equation (5.39) by implementing the reconstruction process. Un-lifting the coefficients multiplying
Acknowledgment
The author would like to thank the referees for their comments and suggestions, which helped improve the exposition of paper.
Footnotes
Given an infinitesimal generator, the corresponding (local) one-parameter group action is obtained by exponentiating the vector field, see (2.4).
Any two-dimensional Lie algebra is solvable.
A differential one-form Ω on J(n) is contact-invariant if and only if, for every g ∈ G, g * Ω = Ω + θg for some contact form θg
In its most general formulation, the universal recurrence formula is stated for a differential form defined on J(∞).
When ℓ = 1, we let
References
Cite this article
TY - JOUR AU - Francis Valiquette PY - 2021 DA - 2021/01/06 TI - Symmetry Reduction of Ordinary Differential Equations Using Moving Frames JO - Journal of Nonlinear Mathematical Physics SP - 211 EP - 246 VL - 25 IS - 2 SN - 1776-0852 UR - https://doi.org/10.1080/14029251.2018.1452671 DO - 10.1080/14029251.2018.1452671 ID - Valiquette2021 ER -