
Magnetic curves in Sol3
- DOI
- 10.1080/14029251.2018.1452670How to use a DOI?
- Keywords
- magnetic curves; contact structure; Sol space
- Abstract
Magnetic curves with respect to the canonical contact structure of the space Sol3 are investigated.
- Copyright
- © 2018 The Authors. Published by Atlantis and Taylor & Francis
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
Introduction
In electromagnetic theory, magnetic curves represent the trajectories of charged particles moving in Euclidean 3-space 𝔼3 under a static magnetic field
The notion of a static magnetic field can be generalized to arbitrary Riemannian manifolds (see [2,25]). Let (M, g, F) be a Riemannian manifold with a closed 2-form F. Then F is referred to as a magnetic field on M. A curve γ(t) is called a magnetic curve if it satisfies the Lorentz equation:
On the other hand, according to Thurston, there are eight model spaces in 3-dimensional homogeneous geometries.
space forms: Euclidean 3-space
product spaces:
the Heisenberg group Nil3, the universal covering
the Sol 3 space.
The study of magnetic curves in arbitrary Riemannian manifolds was developed in early 1990’s, even though related works can be found earlier (see [10,25]). The notation used here is very similar to notation used in [7] and [8].
In 2009 Cabrerizo et al. have looked for periodic orbits of the contact magnetic field on the unit 3-sphere
The purpose of this paper is to study magnetic trajectories in the model space Sol3 of solvegeometry with respect to a contact magnetic field.
1. Magnetic curves
Let (M, g) be a Riemannian manifold. We equip a closed 2-form F on M. Thus we get an endomorphism field φ by
Then a magnetic trajectory γ (also called a magnetic curve) is defined as a solution to
It is well-known that magnetic trajectories have constant speed. When a magnetic curve γ(s) is arc length parametrized, it is called a normal magnetic curve.
One can see that the differential equation of magnetic trajectory is a generalization of geodesic equation. In fact if φ = 0, i.e. F = 0 or q = 0, the differential equation coincides with geodesic equation.
On a Riemannian manifold (M, g, F) equipped with an exact magnetic field F = dA, one can consider the variational problem for regular curves γ(t) with respect to the following Landau-Hall functional:
Let p and p′ be distinct points. Denote by C∞[a, b] the space of smooth curves in M defined on a closed interval [a, b] satisfying the boundary condition
Note that the magnetic equation (1.2) makes sense even if F is not exact.
2. Contact structures
Let M be a 3-dimensional manifold. A 1-form η is said to be a contact form if it satisfies
On a contact 3-manifold (M, η), there exists a unique vector filed ξ such that η(ξ) = 1 and
Moreover, every contact 3-manifold (M, η) admits an endomorphism field φ and a Riemannian metric g such that (see [3]):
The structure (φ, ξ, η, g) is called an almost contact metric structure associated to the contact form η . The resulting space (M, φ, ξ, η, g) is called a contact metric 3-manifold. Note that the volume element of a contact metric 3-manifold M is
Remark 2.1.
On a contact 3-manifold (M, η) equipped with an arbitrary chosen Riemannian metric g, one can take a magnetic field F = k dη(k is a nonzero constant ) and consider magnetic curves with respect to F and g. It seems to be natural to demand that the metric g satisfies some “compatibility condition” (see e.g. (2.1)) with respect to F. In this paper we restrict our attention to Riemannian metrics satisfying the condition:
Remark 2.2.
Perrone in [24] classified homogeneous contact metric 3-manifolds. According to [24], among the simply connected model spaces of Thurston geometry, the following spaces admit a homogeneous contact form compatible to the metric:
3. Invariant contact structure on Sol3
3.1. Model of the Sol3 space
In this subsection we recall relevant facts on Sol3 given in [5, 6, 9,13–8].
The model space Sol3 of solvegometry in the sense of Thurston (see [26]) is the Cartesian 3-space
3.2. Invariant contact structure on Sol3
In this subsection, we introduce a left invariant contact structure on Sol3.
For more about a left invariant contact structures see [4,14,24].
On the solvable Lie group Sol3, we may take the following left invariant orthonormal frame field:
We choose ξ: = e3 and denote by η the metrical dual 1-form of ξ. Namely η is given by
Remark 3.1.
Precisely speaking, to adapt to contact metric geometry, we need to perform the following normalization procedure:
However, in the study of magnetic curves, this normalization is not essential. So we do not use this normalization hereafter (cf. Remark 2.1).
According to (3.4) and (3.5), the Levi-Civita connection ∇ of Sol3 is rewritten as
The sectional curvature K is determined by
4. Magnetic curves in Sol 3
4.1. Contact magnetic fields
Let M = (M, φ, ξ, η, g) be a contact metric 3-manifold. Then for a constant k, F = kdη is a magnetic field on M. The magnetic field F = kdη is called the contact magnetic field on a contact metric 3-manifold M. Magnetic trajectories with respect to contact magnetic fields are called contact magnetic trajectories.
Contact magnetic trajectories on the 3-sphere are investigated in [7]. Munteanu and Nistor studied periodicity of contact magnetic fields on 3-tori [23].
In the case of Sol3 equipped with the structure (φ, ξ, η, g) defined in Section 3.2, we take the contact magnetic field F given by (see (3.7)).
The magnetic curve equation on Sol3 with respect to F = 2dη with charge q is
Note that contact magnetic equation (4.2) is the Euler-Lagrange equation of the Landau-Hall functional
4.2. Magnetic curve equation
First task is to deduce the magnetic curve equation (4.2) for a regular curve γ(s) = (x(s), y(s), z(s)) in Sol3. We have
Next we compute the covariant derivative
Remark 4.1.
Notice that the system of differential equations (4.4) for q = 0 coincides with the system of differential equations (4.4) in [6] which determines geodesics in Sol3(cf. [5,28]).
Without loss of generality, we can restrict our attention to magnetic trajectories under the initial conditions:
After the summing of the first and the third equation of the system (4.4) we obtain
Analogously for y-coordinate, after subtracting the first from the third equation of the system (4.4) we obtain following equation
Hence
Substituting (4.6) and (4.9) in the second equation of the system (4.4) we get
Theorem 4.1.
The normal magnetic curves of the space Sol3 with respect to the contact magnetic field F = 2dη with charge q ≠ 0 is given by the following equations:
In the sequel we consider particular cases of magnetic curves in Sol3.
Example 1
First we examine case z′ = 0 . Then (4.12) implies z = 0 and from (4.7) and (4.10) it follows
Example 2
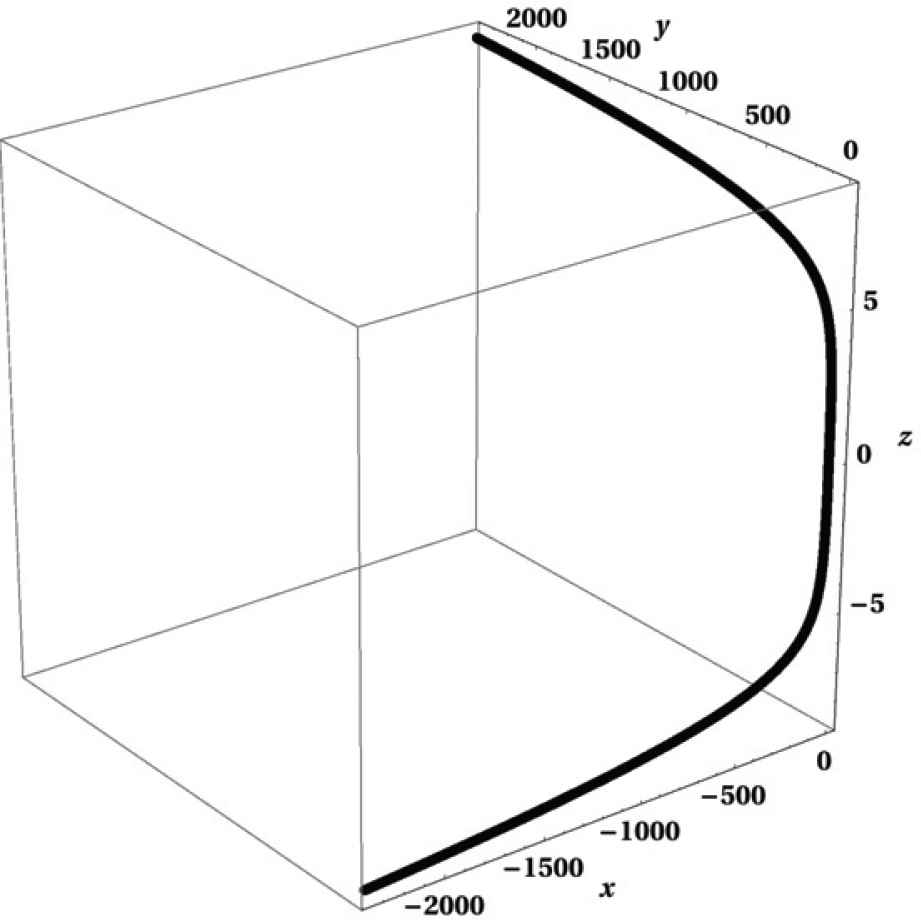
If we assume that
Figure 1 shows the magnetic curve for
Example 3
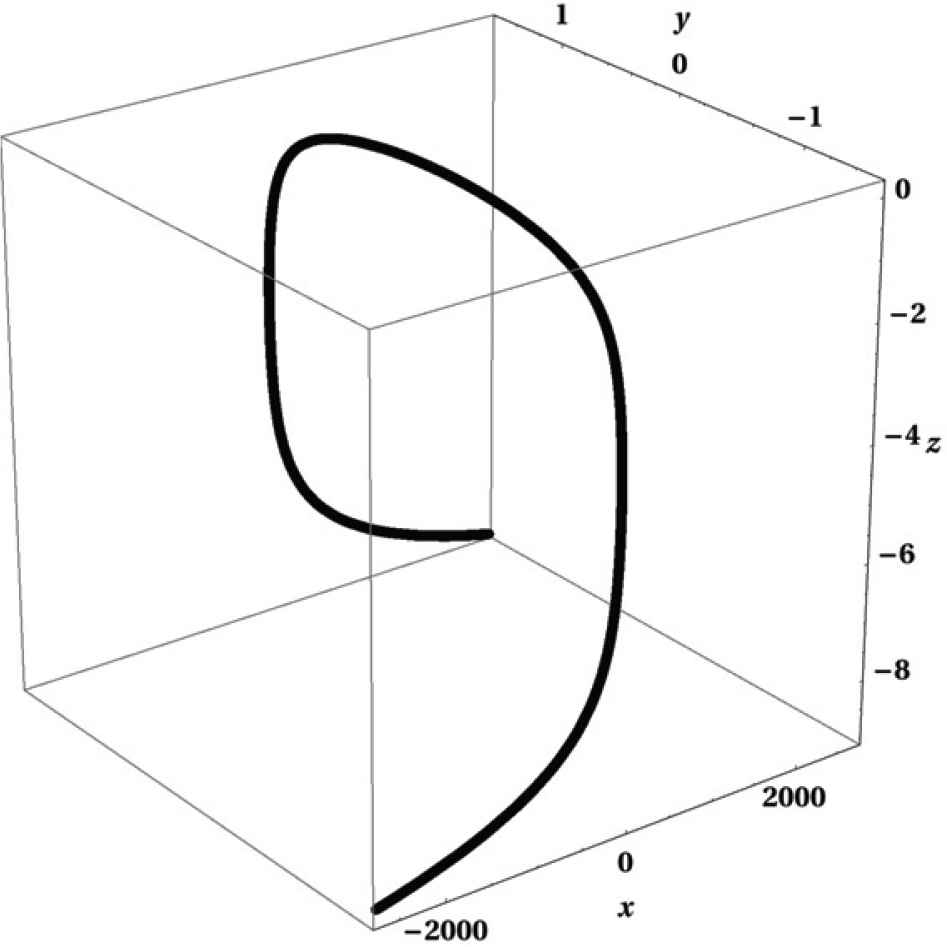
If we assume
Figure 2 shows the magnetic curve for b = 1,
Example 4
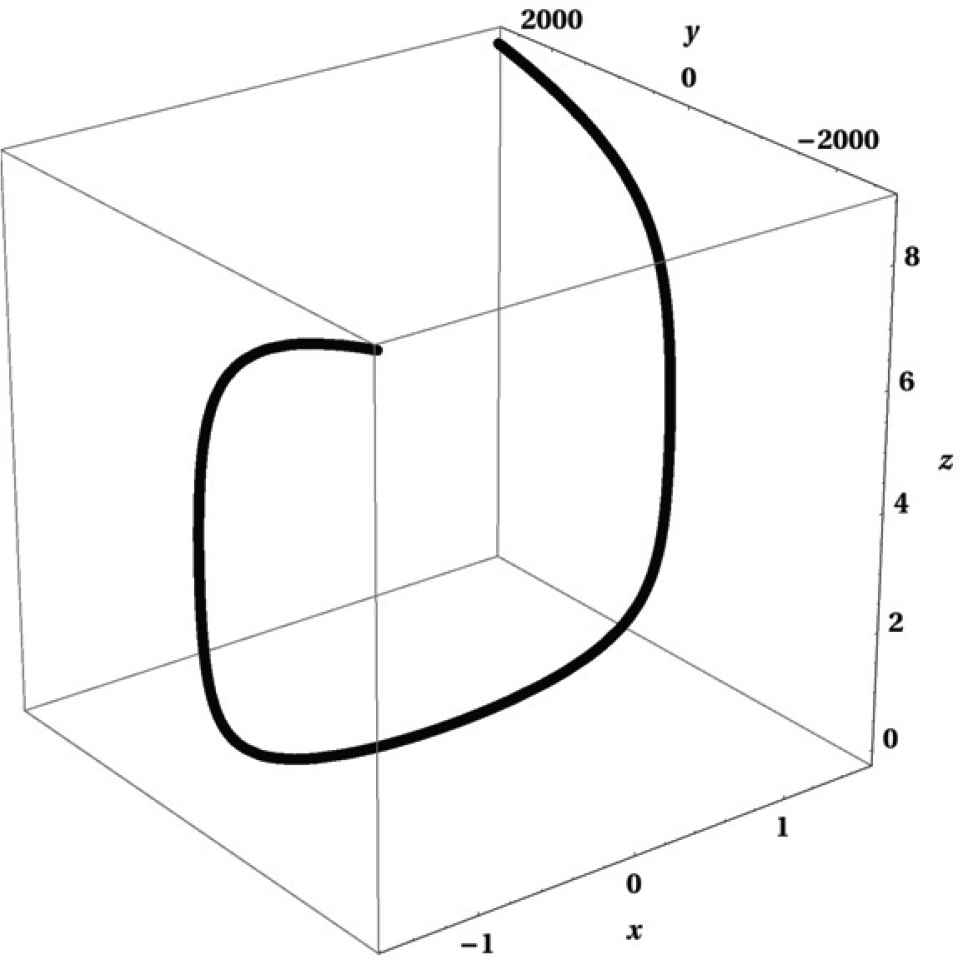
If we assume
Figure 3 shows the magnetic curve for a = 1,
Remark 4.2 (Magnetic Jacobi fields).
Adachi [1] and Gouda [11] obtained the second variational formula of the Landau-Hall functional:
In case (M, g)= Sol3, the sectional curvature function can have both signs. In addition the Lorentz force φ is non-parallel. Thus the behavior of magnetic Jacobi fields along contact magnetic curves in Sol3 appears complicated. This will be addressed in future work.
Acknowledgments
The second named author is partially supported by JSPS Kakenhi 15K048340. The authors would like to thank the referee for her/his careful reading of the manuscript and many suggestions for improving this article.
References
Cite this article
TY - JOUR AU - Zlatko Erjavec AU - Jun-ichi Inoguchi PY - 2021 DA - 2021/01/06 TI - Magnetic curves in Sol₃ JO - Journal of Nonlinear Mathematical Physics SP - 198 EP - 210 VL - 25 IS - 2 SN - 1776-0852 UR - https://doi.org/10.1080/14029251.2018.1452670 DO - 10.1080/14029251.2018.1452670 ID - Erjavec2021 ER -