
Proposal of Parameter Tuning Skills Evaluation by using Sensor Car Behavior Data in Technology Education
- DOI
- 10.2991/jrnal.k.210713.007How to use a DOI?
- Keywords
- Junior High School; parameter tuning skill; quantitative evaluation
- Abstract
The “Future Investment Strategy 2018” presented by the Cabinet Office in 2018 states that there is an urgent need to develop human resources that can use Artificial Intelligence to achieve the goal of Society 5.0. As a part of this strategy, programming education at the primary/secondary level of education is being promoted. However, there are some issues in the quantitative evaluation of learning and teaching methods based on assessment. In this study, sensor car teaching materials were used to teach programming. Then, a new lesson is proposed to tune the optimal parameters by quantitative evaluation. The results of the university students practice of the proposed lesson are explained.
- Copyright
- © 2021 The Authors. Published by Atlantis Press International B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
The Cabinet Office published “Future Investment Strategy 2018” in 2018 [1]. In this strategy, it states that in the Artificial Intelligence (AI) era, in addition to the ability to understand and use AI and data with high mathematical capabilities, the ability to set up and solve problems and create heterogeneous human resources that can produce value with abilities that are difficult to replace by AI (such as the ability to combine things), are needed. AI education at the primary/secondary level is strengthened. Teaching materials are being developed so that programming education can be effectively implemented in elementary schools. Also, local environments are being developed so that students can learn more advanced programming. Thus, there is an urgent need to improve programming education and instruction. This is not limited to Japan. In recent years, there have been many studies on education and lessons in programming. For example, it has been shown that there are many difficulties in learning programming [2] and that beginners in programming are more likely to learn in-class than in take-home learning [3]. Thus, there is an urgent need to improve human resource development, including programming, both domestically and internationally. In Japan, studying programming at the elementary/secondary level school is mainly conducted in junior high school technology and home economics (in the technology field) (hereinafter referred to as junior high school technology). Teaching materials for programming in junior high school technology include materials for programming the timing of lights and sounds, and robotics [4]. As an index for evaluating programming skills, it is generally evaluated qualitatively, such as “Can you use sequential, iterative, and conditional processing?” and “Are there typing errors?”. There are problems with these types of evaluations, such as the fact that they are time-consuming and depend on the teacher’s discretion. To solve this problem, quantitative evaluation studies have been conducted. The “effect” of the program is visualized by having the learner complete tasks of varying difficulty [5]. This method of evaluation allows students to feel their programming skills improve. On the other hand, to develop the competency of junior high school technology, it is important to learn how to optimize the solution to problems. There is no learning programming practice that incorporates quantitative evaluation into this learning process. In this study, a new evaluation method to quantitatively evaluate a sensor car’s linear motion in terms of time and left-right swing during motion is proposed. A lesson for beginners in programming to develop the skills to tune the optimal parameters is also proposed.
2. TEACHING MATERIALS
In this study, a sensor car (made by Artec) as shown in Figure 1 was used. The Studuino mini which is an Arduino-compatible microcontroller board with input/output interfaces for education was used as a microcontroller board. An infrared photoreflector (RPR-220, Made by ROHM) was used as a sensor to identify the line to be traveled. It was powered by three AA batteries at 4.5 V.
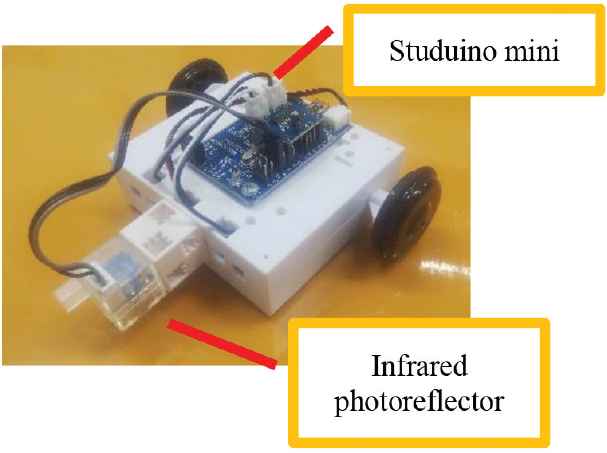
Sensor car.
3. LEARNING TASK
A learning challenge aimed at the beginning student of programming was devised.
3.1. Evaluation Items
As shown in Figure 2, a black line with a width of 10 mm was drawn on the white surface of the field. The sensor car ran straight 500 mm along the black line in this field. The running time and left-right swing were measured. Task 1 shortened the running time, while Task 2 aimed to reduce the left-right swing. The learning task involved tuning the parameters to solve these two tasks.

Field to run.
3.2. Parameters to be Tuned
As shown in Figure 3, the Studuino mini software is capable of Scratch-based visual programming. The learner tuned the five parameters. It is the threshold of the sensor (threshold), and the ratio of pulse width modulation (PWM) to adjust the speed of the left and right motors (M1y, M2y, M1n, M2n).
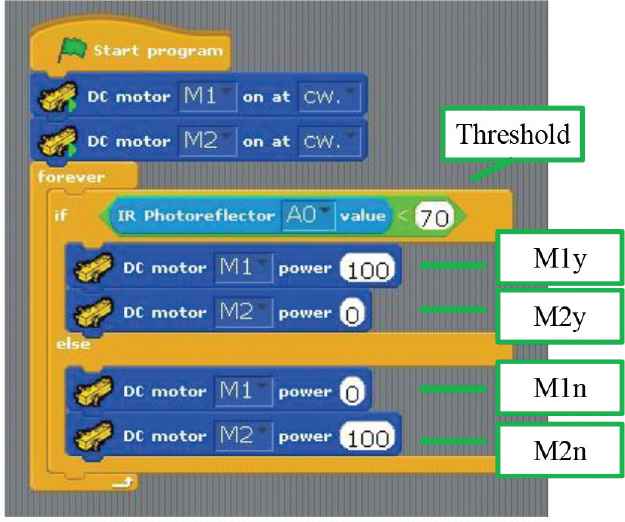
Studuino mini programming.
3.3. Parameter Evaluation
The running time t in Task 1 was measured using a stopwatch. The left-right swing of the sensor car in Task 2 was recorded using a digital camera (IXY 92015, made by CANON). Then, it was analyzed using the video analysis software PV Studio 2D ver2 (made by L.A.B). To measure the left-right swing, markers were attached at two points as shown in Figure 4. The x- and y-axis were defined as shown in Figure 5, and the positions of the markers were read. The left-right swing y12 was calculated using Equation (1). This i is the index of extracted data from the video.
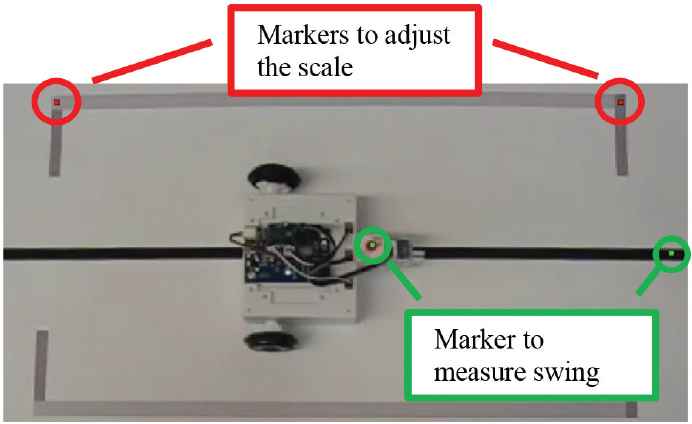
Marker position.
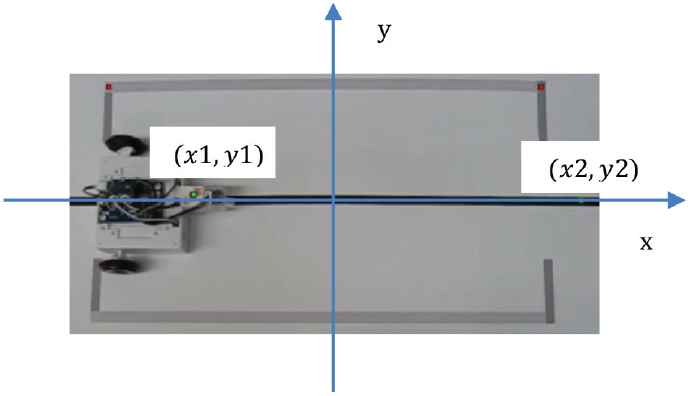
Set axis.
The variance σ2y12 was calculated using Equation (2). However, n is the number of data extracted from the video from the start to the goal using video analysis software. This σ2y12 was used as the left-right swing.
If the running time t and the degree of left-right swing σ2y12 became small, the learner was able to choose a good parameter. In other words, parameter tuning skill was high.
4. LESSON SUGGESTIONS
To examine the time required to implement the proposed learning evaluation method and learning effects, university students practiced a class in teacher training. Two people could use one sensor car. Eight groups of 16 people were included in the study. Table 1 presents the learning plans.
| Hours (min) | Main learning contents | |
|---|---|---|
| Lesson 1 | 60 | Check the relationship between the adjustment of parameters and the movement of the sensor car’s wheels. |
| Lesson 2 | 30 | Know how to program a line trace using a sensor car. |
| Lesson 3 | 90 | Understand the learning task. |
| Tuning the optimal parameters. |
Lesson plan
In Lesson 1, students experienced how changing the direction and speed of rotation from left to right changed the sensor car’s behavior. Most of the students had never previously experienced programming a sensor car. In Lesson 2, students were shown the program shown in Figure 3 and were taught the steps of the program to perform a line trace. In Lesson 3, the students first predicted the sensor car’s movement and designed the parameters to complete the task. They then programmed the sensor car according to the design and made it work. In this way, Lesson 3 incorporated the cycle of design, creation, evaluation, and improvement so that the solution to the problem would be optimal, which is considered important in the learning process.
5. RESULTS AND DISCUSSION
Table 2 shows the results of university students’ practice. In this study, university students carried out the learning process of Lesson 3 four times. Some of the results are presented shown in Table 2. For Group 1, the fourth time was the fastest for Task 1. For Task 2, the second time was the worst. However, it improved by the third and fourth times. For Group 2, the third and fourth times were the same for Task 1. However, the left-right swing improved from 0.25 to 0.16. For the groups shown here, it was concluded from the quantitative evaluation that the parameters were better regulated.
| Group 1 | Group 2 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| t(s) | σ2y12 | Threshold | M1y | M2y | M1n | M2n | t(s) | σ2y12 | Threshold | M1y | M2y | M2n | M1n | |
| First time | 4.17 | 0.085 | 80 | 55 | 100 | 100 | 55 | 4.01 | 0.32 | 46 | 100 | 20 | 20 | 100 |
| Second time | 4.12 | 37.80 | 60 | 75 | 100 | 100 | 75 | 4.05 | 0.31 | 45 | 100 | 30 | 30 | 100 |
| Third time | 4.02 | 0.24 | 60 | 80 | 100 | 100 | 60 | 3.73 | 0.25 | 43 | 100 | 80 | 80 | 100 |
| Fourth time | 3.98 | 0.18 | 60 | 90 | 100 | 100 | 75 | 3.73 | 0.16 | 43 | 100 | 90 | 90 | 100 |
Sensor car results
6. CONCLUSION
In this study, a lesson and an evaluation method were proposed to develop the skills required to tune the parameters. The proposed lesson and evaluation methods were implemented by university students. It was shown that parameter regulation skills could be quantitatively evaluated. The evaluated data were compared and statistically analyzed. The goodness of parameter tuning is demonstrated. In future studies, learning time will be organized and supplementary materials will be developed so that this study can be implemented in junior high schools.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
ACKNOWLEDGMENT
The authors are grateful that this work was supported by the
AUTHORS INTRODUCTION
Mr. Teruyuki Tamai
 He received the M.A. degrees in Education from Hiroshima University in 2012. He is currently a Doctoral course student in the Graduate School of Education, Hiroshima University. He is an Assistant Professor in the Faculty of Education, Ehime University.
He received the M.A. degrees in Education from Hiroshima University in 2012. He is currently a Doctoral course student in the Graduate School of Education, Hiroshima University. He is an Assistant Professor in the Faculty of Education, Ehime University.
Dr. Yoshihiro Ohnishi
 He received his Dr. Eng. from Osaka Prefecture University in 2002. He is a professor at Faculty of Education in Ehime University.
He received his Dr. Eng. from Osaka Prefecture University in 2002. He is a professor at Faculty of Education in Ehime University.
Mr. Keita Murai
 He received his B.Ed. degree in Education in 2020 from the Faculty of Education, Hiroshima University. He is acquiring the M.Ed. in the Graduate School of Humanities and Social Sciences, Hiroshima University.
He received his B.Ed. degree in Education in 2020 from the Faculty of Education, Hiroshima University. He is acquiring the M.Ed. in the Graduate School of Humanities and Social Sciences, Hiroshima University.
Dr. Kazuo Kawada
 He received his PhD degree at Graduate School of Education in Hiroshima University. He is an Associate Professor in the Graduate School of Humanities and Social Sciences, Hiroshima University.
He received his PhD degree at Graduate School of Education in Hiroshima University. He is an Associate Professor in the Graduate School of Humanities and Social Sciences, Hiroshima University.
REFERENCES
Cite this article
TY - JOUR AU - Teruyuki Tamai AU - Keita Murai AU - Yoshihiro Ohnishi AU - Kazuo Kawada PY - 2021 DA - 2021/07/23 TI - Proposal of Parameter Tuning Skills Evaluation by using Sensor Car Behavior Data in Technology Education JO - Journal of Robotics, Networking and Artificial Life SP - 104 EP - 107 VL - 8 IS - 2 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.210713.007 DO - 10.2991/jrnal.k.210713.007 ID - Tamai2021 ER -