
Practice of Programming Education using Finger Robot
- DOI
- 10.2991/jrnal.k.200221.002How to use a DOI?
- Keywords
- Programming education; binary number; robot; CS unplugged
- Abstract
The movement of teaching computer science to children can be seen all over the world, but because it contains abstract content, it is difficult for children like elementary school students to understand it through lectures alone. The purpose of this study is to develop teaching materials that stimulate interest in the concept of binary numbers by using robots to teach computer science. As a result of having children use the developed material, it helped them understand binary numbers.
- Copyright
- © 2020 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Today is the fourth industrial revolution. In Japan, the national curriculum was revised in 2017, and the new national curriculum will be implemented in elementary schools from FY 2020. The new national curriculum will require programming education at the elementary school level. Turning to the rest of the world, from 2014 England made “Computing” a compulsory subject at the primary school level [1]. From a global perspective, it can be seen that the knowledge, skills, qualities and abilities of computers and programming are considered to be necessary in the future.
Toward 2020, lessons using visual programming languages and lessons using robots are being tried as practical programming education in various parts of Japan [2,3]. It has been reported that, according to the lessons using robots, robots can attract children’s interest even if they do not have a high level of interest and understanding of scientific concepts, are good at carrying out thinking try and error, and can work on programming while having fun.
Most of the robots used in programming lessons are mobile robots. The mobile robot has the advantage of being able to observe the behavior of the robot at the time of program execution, and being able to understand the control structure and its necessity step-by-step by case of repetition and collision. However, there are few teachers who can teach robot programming and it is difficult for children to understand and program sensors and motors. Development of robot teaching materials that are simple in programming and that operate without a deep understanding of sensors and motors facilitates robot programming that has many advantages in programming education.
An approach to teaching computer science to elementary school children is “COMPUTER SCIENCE Unplugged” (Next, CS Unplugged), developed by Bell et al. [4] in New Zealand. CS Unplugged is a simple way for elementary school students to learn the basic principles of computers. Examples include binary numbers, image representations, and text compression. In the computer world, information is represented in binary. In the process of learning programming, learning how a computer works will help you better understands computers and programming.
Learning materials that teach programming and the basic principles of computers at the same time will be needed in the future. In this research, we develop a robot teaching material that can simultaneously learn binary numbers and programming.
2. EDUCATIONAL ROBOT TEACHING MATERIALS
The proposed teaching material is a robot (Next, “Finger Robot”) which imitates the right hand of a human as shown in Figure 1, and consists of the back of the hand and five fingers. The Finger Robot uses the robot kit of Artic Co., Ltd (Osaka, Japan). Studuino is used as a controller to operate the Finger Robot. The software uses Studuino Software, a block programming language, so that even elementary school students can easily handle programming.
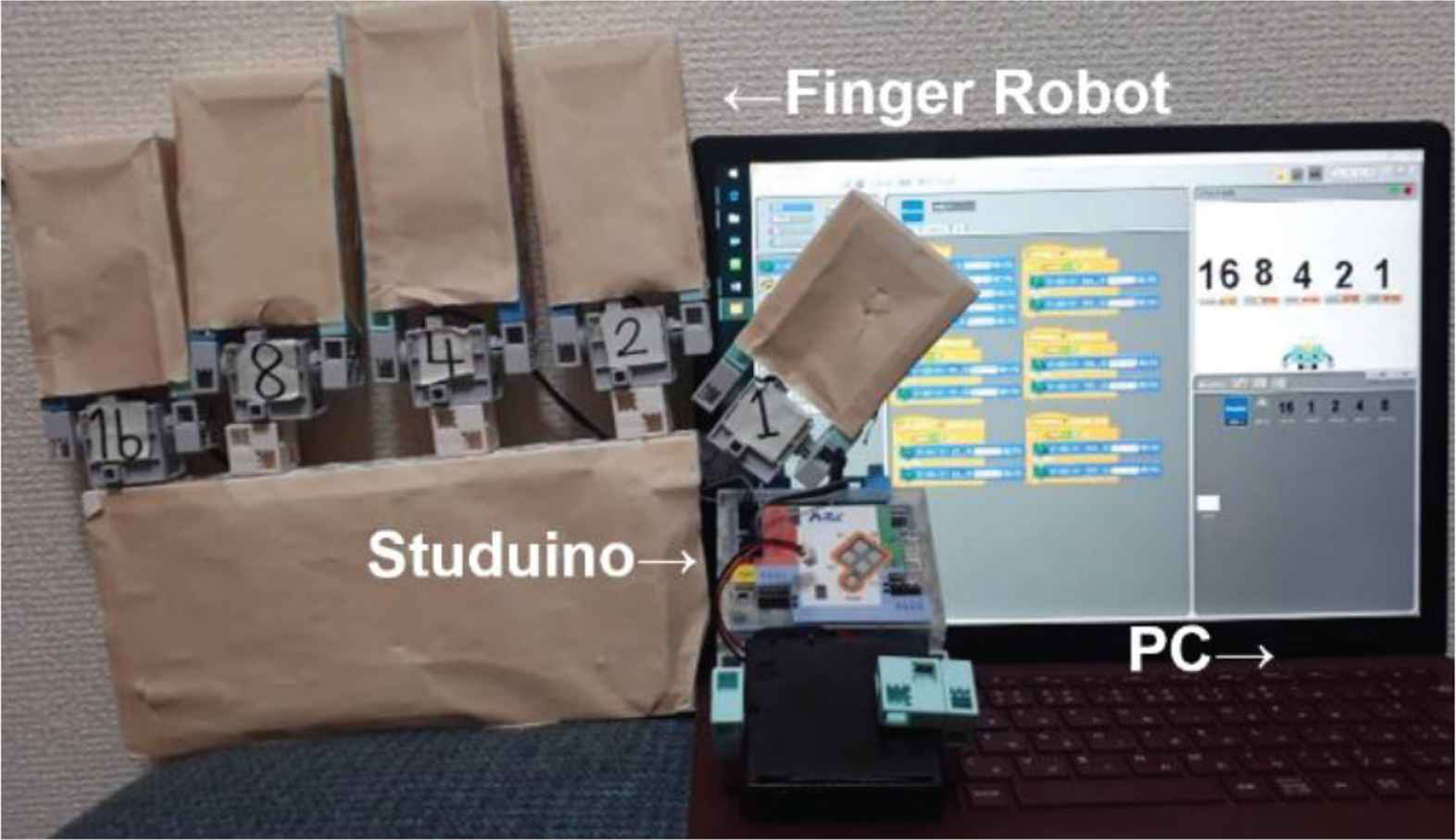
Finger Robot.
2.1. Hardware
Studuino is connected to a Personal Computer (PC) via a USB cable. A servomotor is used as a finger moving mechanism. An external power supply (dry battery) is used as a power source to move the servomotor. Studuino can be used in two patterns: communication mode and transfer mode. The communication mode is to use Studuino and PC connected all the time, and the communication can be carried out all the time. The transfer mode is to write a program to Studuino’s RAM and it can also be used by Studuino alone. In this teaching material, it is used in the communication mode in order to display the state of the Finger Robot on the screen of PC.
A Finger Robot can be operated by using a servomotor for each finger and connecting a terminal to the I/O port of Studuino. Unlike a normal motor, a servomotor can be positioned according to a specified angle. Studuino Software is able to run the block shown in Figure 2 simply by specifying an angle. A servomotor of 90° is in a state where the fingers are stretched as shown in Figure 1. The servomotor is bent at 180°.

Block that specifies the angle.
2.2. Software
When a robot is moved by programming, it is possible to move a finger without using conditional branching or manipulation of variables. Since the purpose of this educational material is to arouse interest in the concept of binary numbers, the program shown in Figure 3a is prepared in advance as a function so that the child can operate the servomotor by executing the block shown in Figure 3b. Although English is used in the figure, it is used by children in Japanese.
Figure 3b is a function for operating the servomotor according to the state of the finger portion. The condition specified in the argument is a variable representing the state of the finger part, and in Figure 3a, if the function is called when the finger part representing position 16 is extended, the finger part is bent, and if it is called when it is bent, it is stretched. Five functions, one for each finger, were prepared as shown in Figure 3b.
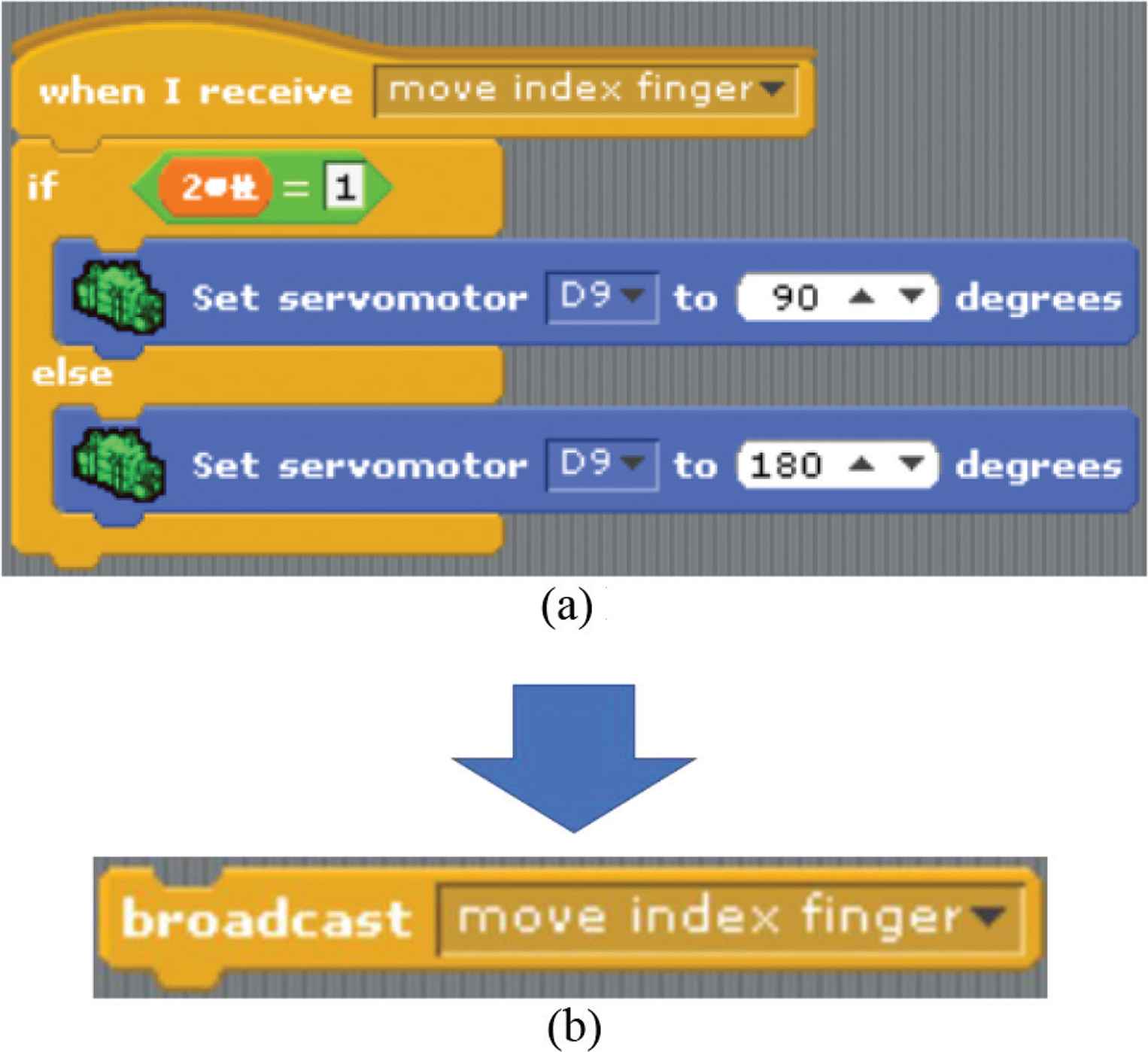
Function to operate the servomotor. (a) Program before functioning. (b) Functionalized blocks.
In the activity in the lesson, the child makes the program which moves the finger part using the function, and experiences the conversion between 10 and binary numbers based on the idea of the bit string, while bending and stretching the finger. The programs prepared by children are a combination of those shown in Figure 3b. As an example, in the case where all the finger portions are extended as shown in Figure 1 to a state representing the binary number “10101”, among the blocks shown in Figure 3b, the blocks relating to the ring finger and the index finger are combined.
During programming, a screen as shown in Figure 4 is displayed on the PC screen. As an example, the numbers displayed on the stage shown in Figure 4 indicate that “4” and “1” are smaller, and that the fingers corresponding to “4” and “1” are curved in the Finger Robot. And, the value which made the description of the finger to correspond to the binary number is displayed under the numeral, and “0” is displayed under “4” and “1” of Figure 4, and it is proven that “11010” is obtained when the state of the finger of Figure 4 is expressed in the binary number. In the case of Figure 4, children can visually confirm that the binary “11010” corresponds to the decimal 26 by adding up the increasing decimal number.
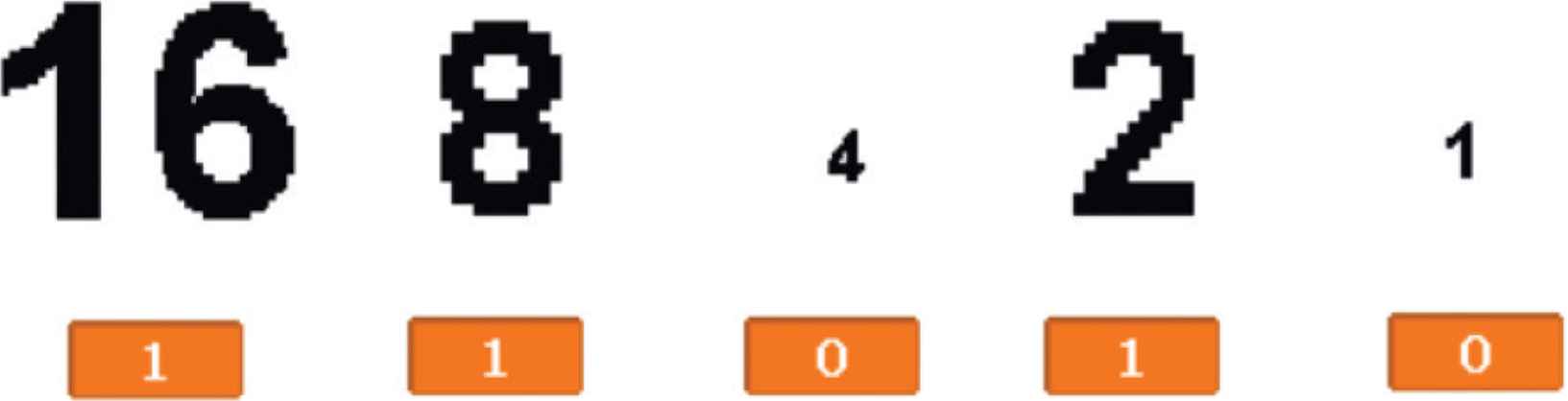
Screen of the stage.
2.3. Activity
In lesson, children use Finger Robots in pairs. The teacher presents a problem to move the Finger Robot to a specified state. The questions will be asked in four different ways. The four problems are the shape of the finger as a photograph, the shape of the finger as a letter, the shape of the finger as a binary number, and the shape of the finger as a decimal number. For these problems, consider the program in pairs. The child checks the current state of the robot and then programs it to figure out which finger to move to get it into the state described in the problem. Run the program once and transform it from the current state to the problem state. After you run the program, make sure it is the same as the problem, fix the program, or work on the next problem. It is instructed not to change the present state every time a child makes a mistake.
3. RESULTS OF USING TEACHING MATERIALS
In order to evaluate the proposed teaching materials, we conducted a programming experience at the University Festival of Tokyo Gakugei University. Figure 5 shows the author performing a bit string experience for each child using the proposed teaching materials. The content of the experience is the content which solves the problem shown in Table 1 using the proposed teaching material. After the experience, the questionnaire on the teaching material was carried out for the child. The subjects were 13 children from 1st grade to 5th grade.

Scene of actual practice.
| Number | Problem statement |
|---|---|
| ① | Shape fingers into a picture (In this article, the photograph is omitted, but only the index finger and middle finger are bent.) |
| ② | Shape fingers like this “only the thumb and ring and little fingers are bent” |
| ③ | Shape fingers in the form of the binary number “01010” |
| ④ | Shape fingers as a number “26” |
Problems solved by the children
The questionnaire was prepared by five methods on eight questions including the items shown in Table 2 such as impression using this teaching material and idea on robot teaching material. From the result of the questionnaire, the children who answered “I want to take a programming class using this robot/I really want to take it” to Q6 were 92%, and the children who answered “I think you understand the way of thinking about bit strings.” to Q9 were 75%. From this fact, it was proven that the child was interested in the idea of the bit string.
| Number | Questions |
|---|---|
| Q6 | I want to take a programming class using this robot. |
| Q9 | If you take a class using this robot, you will understand well about “binary number” |
Questions (Partial except)
4. CONCLUSION
In this research, developed a teaching material called Finger Robot that can be used for programming education in elementary schools. Using a Finger Robot, elementary school students can learn the idea of counting binary numbers with their fingers while experiencing programming. By associating the state of the Finger Robot with the binary representation and decimal number, children can deepen their understanding of the correspondence between binary and decimal numbers. In the future, plan to carry out endurance tests assuming the use of children, and to establish issues to deal with various developmental stages.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
AUTHORS INTRODUCTION
Mr. Kaito Omata
 He received the Bachelor of Education in 2019 from Tokyo Gakugei University, Japan. Currently, he is a master course student at the University of Tokyo, Japan. His research interests include Programming Education and Psychology of Learning and Instruction.
He received the Bachelor of Education in 2019 from Tokyo Gakugei University, Japan. Currently, he is a master course student at the University of Tokyo, Japan. His research interests include Programming Education and Psychology of Learning and Instruction.
Dr. Shinichi Imai
 He graduated doctor course at department of engineering in Hiroshima University. He works at department of education in Tokyo Gakugei University. His research area is about control system design and educational engineering.
He graduated doctor course at department of engineering in Hiroshima University. He works at department of education in Tokyo Gakugei University. His research area is about control system design and educational engineering.
REFERENCES
Cite this article
TY - JOUR AU - Kaito Omata AU - Shinichi Imai PY - 2020 DA - 2020/02/26 TI - Practice of Programming Education using Finger Robot JO - Journal of Robotics, Networking and Artificial Life SP - 262 EP - 264 VL - 6 IS - 4 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.200221.002 DO - 10.2991/jrnal.k.200221.002 ID - Omata2020 ER -