
Mean-square Quasi-composite Rotating Formation Control of Second-order Multi-agent Systems under Stochastic Communication Noises
- DOI
- 10.2991/jrnal.k.190828.004How to use a DOI?
- Keywords
- Quasi-composite; rotating formation; multi-agent systems; stochastic communication noises
- Abstract
This paper mainly concerns the mean-square quasi-composite rotating formation problem of second-order multi-agent systems (MASs) with stochastic communication noises. Firstly, the definition of mean-square quasi-composite rotating formation is proposed. Afterwards, a distributed control protocol with time-varying control gains is designed. And then, the origin closed-loop system is changed into an equivalent closed-loop system by taking coordinate transformation. Under some mild assumptions, sufficient conditions are deduced. Eventually, a numerical simulation is provided to confirm the effectiveness of the proposed theoretical results.
- Copyright
- © 2019 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Over the past few decades, distributed coordination control of Multi-Agent Systems (MASs) is a research focus and attracts lots of attentions from many fields. Among them, consensus problem is a fundamental problem, aiming at this problem, numerous of good results have been reported. A theoretical framework for analysis of consensus for MASs was built in Olfati-Saber et al. [1], and had great influence. Besides, others of excellent results have been reported, such as asynchronous consensus [2], leader following consensus [3], finite-time consensus [4] and so on [5,6].
It is common to find that there always exist lots of collective motions in nature and reality engineering, such as the distributed formation flight of satellites around the moon while the moon moving around the earth, flocks of birds flying around a closed circle and so on. Recently, to imitate or explain such kinds of motions, the collective rotating motions of second-order MASs was investigated in Lin and Jia [7], based on which, Lin et al. [8], made a further study on the distributed composite-rotating consensus of second-order MASs. Furthermore, rotating consensus [9], common finite-time rotating encirclement control [10], and the influence of non-uniform delays on distributed rotating consensus [11] was investigated. Moreover, notice the fact that, groups of agents may require to maintain desired formation during this process, therefore, the formation control of MASs was investigated, such as Xiao et al. [12], Xue et al. [13], and Meng et al. [14].
Notice that the above-mentioned works all assumed that the information exchange between different agents is ideal, that is, each agent can obtain its neighbor’s information accurately. However, in reality, the communications among different agents may be interfered by stochastic communication noise, which may lead to great negative influence on the stability of the system. It is meaningful to design proper control protocol such that the stochastic communication noises can be countered. The consensus control problem of MASs with communication noises were solved in Li and Zhang [15], Cheng et al. [16], Guo et al. [17], and Sun et al. [18]. The mean-square composite-rotating consensus problem of second-order MASs with communication noises was addressed by introducing a time-varying consensus gain in the control protocol [19]. Since the formation is considered and a time-varying consensus gain is introduced into the control protocol to attenuate the stochastic communication noises, though the origin closed-loop system is changed into an equivalent closed-loop system by taking a coordinate transformation, it is still difficult to obtain the eigenvector of the matrix. Therefore, the methods proposed in Li and Zhang [15], Cheng et al. [16], Guo et al. [17], Sun et al. [18], and Mo et al. [19] cannot be directly extended to achieve the quasi-composite rotating formation control of MASs under stochastic communication noises. Up-to-date, it is a pity to find that there is no result on composite-rotating formation control of MASs with stochastic communication noises.
Motivated by the above discussions, the mean-square quasi-composite rotating formation control of second-order MASs with stochastic communication noises is considered in this paper as a response to the lack of corresponding researches, by using which the actual physical system can be described more precisely. The main contributions of this paper can be summarized as follows: (i) In contrast with Mo et al. [20], where the quasi-composite rotating formation control of MASs was solved without communication noises, the results of this paper are more realistic. (ii) The definition of the mean square quasi-composite rotating formation of MASs is first proposed. (iii) A novel distributed control protocol with a time-varying control gain is designed, by using which the stochastic communication noises can be attenuated. (iv) By using the theory of stochastic differential equation and proper coordination transformation, it is proved that under some mild conditions, the desired formation can be achieved.
The rest of this paper is organized as follows. In Section 2, the theories of algebraic graph are introduced. Section 3 describes the system models and the problem under investigation. In Section 4, the definition of mean-square quasi-composite rotating formation is given, besides a novel distributed control protocol and sufficient conditions are deduced for achieving mean-square quasi-composite rotating formation of MASs. A numerical simulation is given in Section 5 to verify the effectiveness of theoretical results we proposed. Finally, a conclusion is made for this paper in Section 6. Notations: Throughout this paper, let ℝ and ℂ denote the sets of real numbers and complex numbers; Let In ∈ ℝn×n (On ∈ ℝn×n) be the n × n identity (zero) matrix, 1n ∈ ℝn denote the n × 1 column vector of all ones; Let diag{s1, s2, ..., sn} ∈ ℝn×n denotes the diagonal matrix with diagonal entries s1, s2, ..., sn; j represents the imaginary unit; A* represents the conjugate transpose of matrix A; For complex vector x ∈ ℂn, ||x||2 = x*x; tr(P) represents the trace of P; (·)T denotes the transpose of a real matrix; (·)−1 denotes the inverse of a invertible matrix; λmax(·) denotes the maximum eigenvalue of a real symmetric matrix.
2. PRELIMINARIES
Theories of algebraic graph [21]. Let (𝒱, ε, 𝒜) be an undirected graph with n nodes, 𝒱 = {1, 2, ..., n} represents the set of nodes, and ε ⊆ 𝒱 × 𝒱 represents the set of edges, 𝒜 = [aij] represent the weighted adjacency matrix. Let Ni = {j ∈ 𝒱: (j, i) ∈ ε} denotes the neighbors set of node i, ℒ = [lij] denotes the Laplacian of graph 𝒢. Graph 𝒢 is said to be connected if there exists a path between every two distinct nodes.
Lemma 1.
Ren and Beard [22]. If 𝒢 is a connected undirected graph, then the Laplacian ℒ of 𝒢 has a simple zero eigenvalue, and 1n is the corresponding eigenvector. Additionally,
Lemma 2.
Ren and Beard [22]. If 𝒢 is a connected undirected graph, there exists an orthogonal matrix U such that UT ℒU = diag{0, λ2,..., λn}, and the last column of U is
3. MODEL AND PROBLEM STATEMENT
Consider a multi-agent system with n agents, the dynamics of each agent are given as follows [Equations (1) and (2)]:
In this paper, our objective is to design a distributed control protocol by local information to assure that the effect of stochastic communication noises can be counteracted, and all agents surround a moving point with a desired structure and a constant angular velocity ω1 > 0 while the moving point surrounds the origin with a constant angular velocity ω2 > 0.
4. MAIN RESULTS
In this section, the mean-square quasi-composite rotating formation control of MASs (1) and (2) is investigated.
Let
Suppose that the information exchange among the agents is affected by the stochastic communication noises. The information of the ith agent received from its neighbor agents is defined as follows:
Remark 1.
When there exist no communication noises, i.e., ηrik = 0 and ηṽik = 0, the problem considered herein degenerate into the quasi-composite rotating formation problem which was considered in Mo et al. [20]. Furthermore, when ω2 = 0, it degenerates into the quasi-rotating formation problem which was investigated in Lin and Jia [7]. When ω2 = 0 and have no formation requirements for the agents, the problem considered herein degenerate into the mean-square consensus problem which was investigated [8]. Generally speaking, the problem considered in Lin and Jia [7], Guo et al. [17], and Mo et al. [20] all can be seen as a special case of this paper.
The definition of the mean-square quasi-composite rotating formation is given as follows:
Definition 1.
Let h = (h1, h2, ..., hn)T = (ρ1ejθ1, ρ2ejθ2, ..., ρnejθn)T ∈ ℂn denotes the desired formation, where ρi > 0, θi ∈ [0, 2π), i = 1, 2, ..., n. The MASs (1) and (2) are said to achieve mean-square quasi-composite rotating formation if for each i, k = 1, 2, ..., n.
Remark 2.
Here we make more explanations for the Definition 1. Equation (4) means that the rotating centers of all agents reach consensus eventually in mean square. Equation (5) means that all agents achieve quasi formation h eventually in mean square. Equations (6) and (7) respectively means that all agents and all rotating centers were guaranteed to move in a circle with angular velocity ω1 and ω2 eventually in mean square. Therefore, when conditions (4)–(7) are all satisfied, as time tends to infinity, all agents are guaranteed to surround a moving point with a desired formation h and a constant angular velocity ω1 > 0 while all moving rotating centers are guaranteed to surround the origin with a constant angular velocity ω2 > 0 in mean square.
In this paper, the following distributed control protocol is proposed:
To continue, we need the following assumptions.
Assumption 1.
The communication topology graph 𝒢 is connected.
Assumption 2.
Assumption 3.
Li and Zhang [15]. Convergence condition:
Assumption 4.
Li and Zhang [15]. Robust condition:
Remark 3.
For the purpose of suppressing the stochastic communication noises, the time-varying control gain a(t) is introduced into the control protocol, i.e., making it more robust to the stochastic communication noises. All agents are assured to achieve quasi-composite rotating formation motion with a not too fast rate by taking Assumption 3, and the stochastic communication noises are against by the control protocol by taking the Assumption 4.
From
Furthermore, together (1) we have [Equation (10)]
Then, we have
Furthermore, we have
Lemma 3.
Suppose that Assumptions 1 and 2 are fulfilled. For a matrix
Proof.
Denote
Suppose Φ has a grade 2 generalized eigenvector associated with
Similarly, Φ does not have two generalized eigenvectors associated with
Next, let us prove that other eigenvalues of Φ have negative real part. Let λ0 ≠ 0 be an arbitrary eigenvalue of Φ and
Consider the following auxiliary system:
Take 𝒱(t) = x*(t) x(t), along system (21), we have
Therefore, Re(λ0) ≤ 0. If λ0 = jb, b ≠ 0 and
Lemma 4.
Under Assumptions 1–4,
Proof.
Since
Theorem 1.
Suppose that Assumptions 1–4 are fulfilled. The desired mean-square quasi-composite rotating formation control of MASs (1) and (2) can be achieved by taking the control protocol (8).
Proof.
Let
Take invertible matrix U = [β1, β2, Ū] ∈ ℂ2n×2n with
Let ζ(t) = U−1δ(t),
Then, the origin system can be decoupled into the following system:
In view of the theory of stochastic differential equation, the solution of (29)–(31) is
Since all eigenvalues of Λ have negative real parts, this together Lemma 3 with Assumptions 3, we have
Together δ(t) = Uζ(t) with (32) and (33), we have
Let v(t) = (v1(t), v2(t),...,vn(t))T, c(t) = (c1(t), c2(t),...,cn(t))T, we can obtain that
Since
Remark 4.
Different from Li and Zhang [15], Cheng et al. [16], Guo et al. [17], Sun et al. [18], and Mo et al. [19], where the mean square consensus control of MASs was investigated, the mean-square quasicomposite rotating formation control of MASs is investigated in this paper. Since the formation is considered and a time-varying consensus gain is introduced into the control protocol to attenuate the stochastic communication noises, though the origin closed-loop system is changed into an equivalent closed-loop system by taking a coordinate transformation, it is still difficult to obtain the eigenvector of the matrix. Therefore, the methods proposed in Li and Zhang [15], Cheng et al. [16], Guo et al. [17], Sun et al. [18], and Mo et al. [19] cannot be directly extended to solve the problem proposed herein.
5. A NUMERICAL EXAMPLE
To demonstrate the effectiveness of the proposed theoretical results, consider MASs with six nodes. The communication topology graph of the MASs is shown in Figure 1, from which we could see that the communication topology graph is connected such that the Assumption 1 is satisfied. Without loss of generality, we assume that the weight of each edge is 1. Then consider the MASs (1) and (2), where the control input in (2) is chosen as the distributed control protocol (8). The initial conditions of the system are taken as r1(0) = −2.8 – 4.8j, r2(0) = 1.7 + 4.2j, r3(0) = −1.1 + 6.2j, r4(0) = 3 + 5j, r5(0) = −1 + 6j, r6(0) = 3 + 5.3j, ṽ1(0) = 2.1, ṽ2(0) = 2.8, ṽ3(0) = −0.9, ṽ4(0) = −2, ṽ5(0) = −1, ṽ6(0) = −2.2. Take
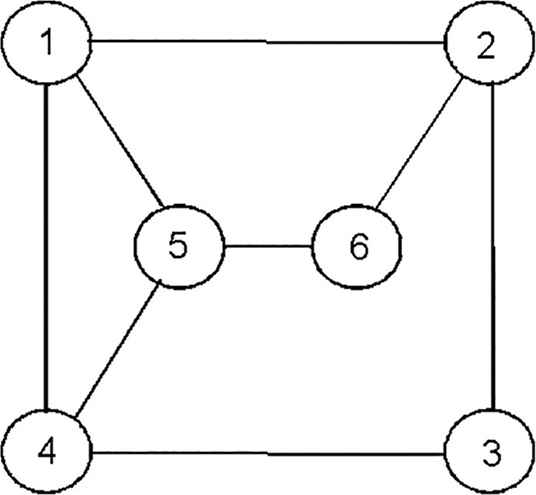
The communication topology graph.
Figure 2 shows the position trajectories of the MASs, from which we could see that all agents finally surround a common moving point with a desired formation. Figure 3 shows the trajectories of the moving rotating centers, from which we could see that the moving points finally surround the origin with a constant angular velocity. We could see the whole (Figure 4) and local (Figure 5) trajectories of the position and moving rotating centers of the MASs for more intuitive, which implicates that Theorem 1 is effective. Besides, it is clear from Figures 6 and 7 that the control input value of each agent tends to a bounded value as time tends to infinity.
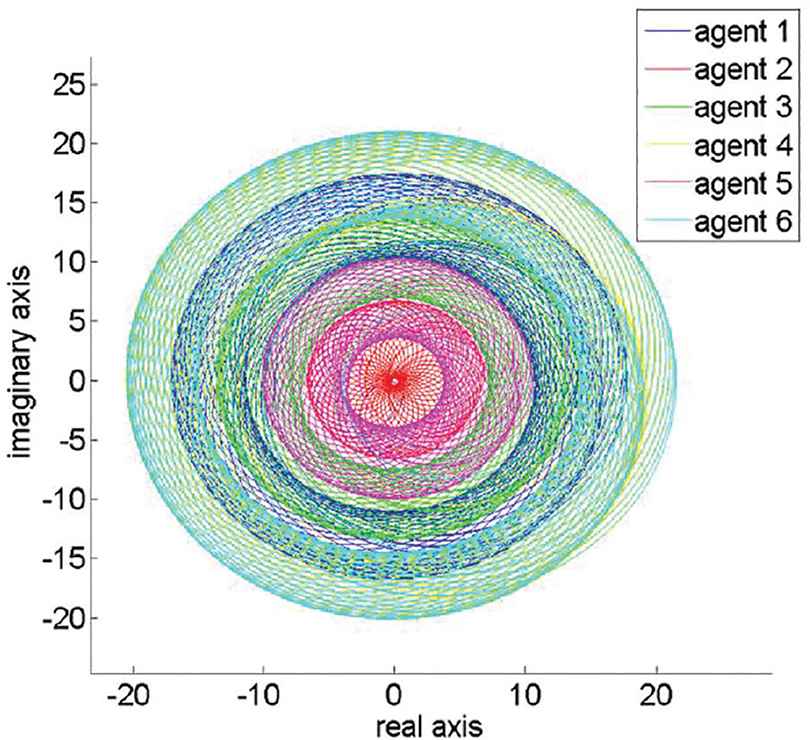
Position trajectories of the MASs.
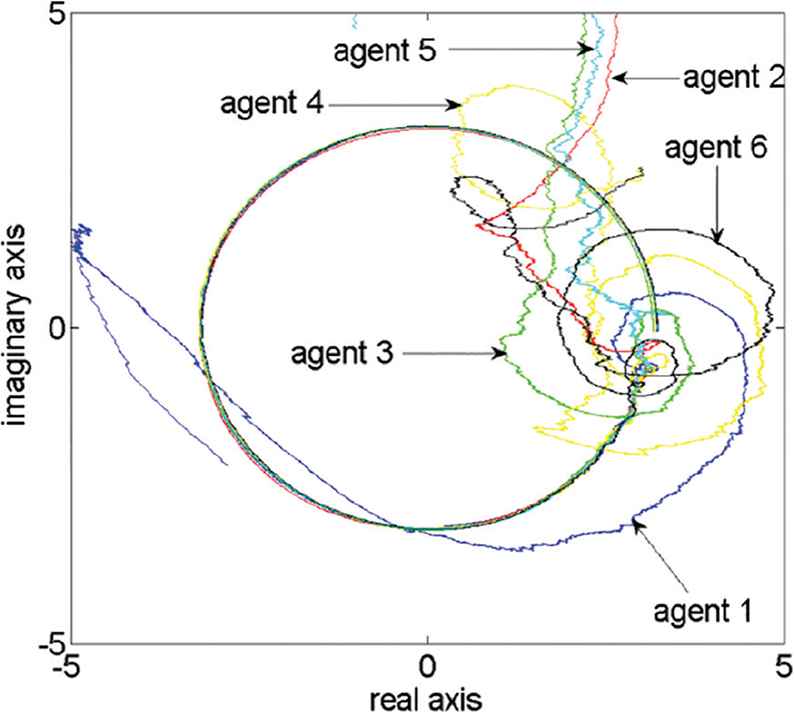
Trajectories of the moving rotating centers.
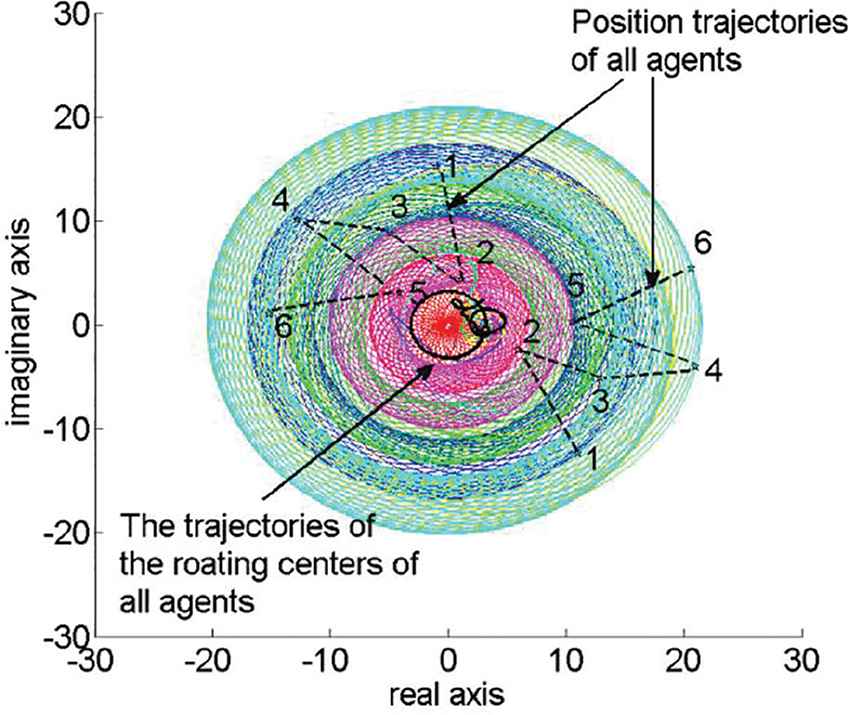
Whole trajectories of the position and moving rotating centers of the MASs.
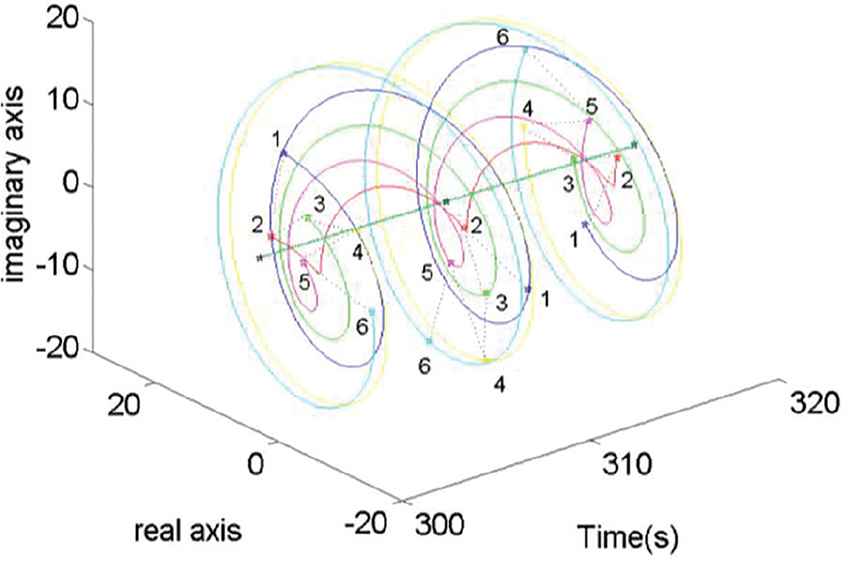
Local trajectories of the position and moving rotating centers of the MASs.
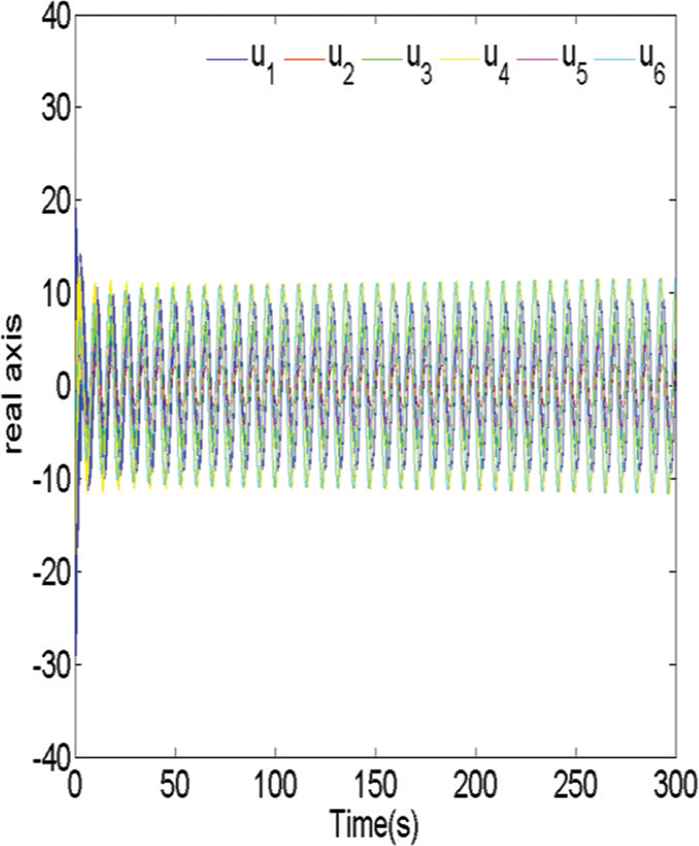
Trajectories of the control inputs of the MASs (the real part).
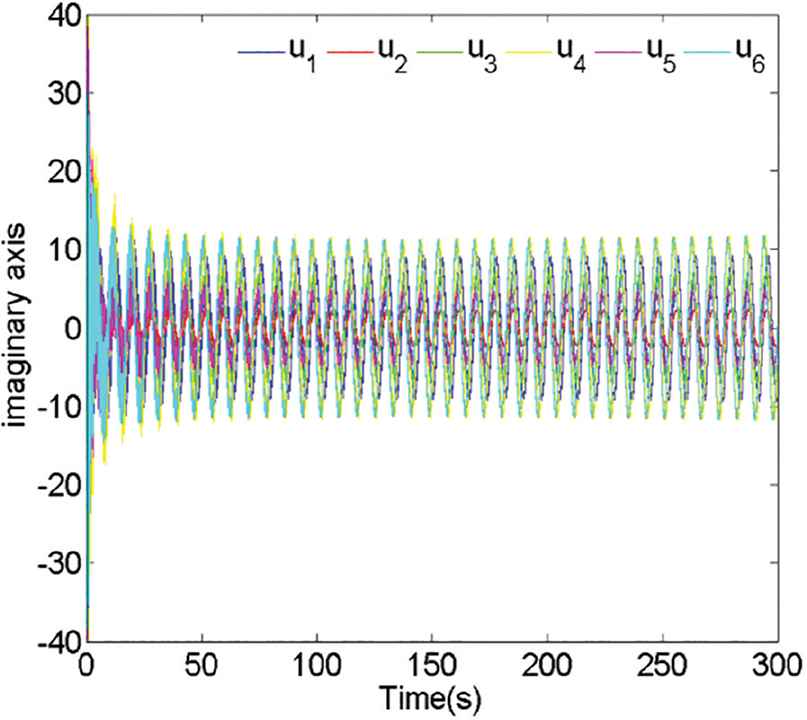
Trajectories of the control inputs of the MASs (the imaginary part).
6. CONCLUSION
The mean-square quasi-composite rotating formation problem of second-order MASs with stochastic communication noises was investigated in this paper. A novel distributed control protocol with a time-varying control gain was designed. And then, corresponding sufficient conditions were deduced. Besides, the effectiveness of the proposed theoretical results was confirmed via a numerical example.
ACKNOWLEDGMENTS
This work was supported by the
Authors Introduction
Prof. Lipo Mo
 He received his B.S. degree in Department of Mathematics, Shihezi University, China, in 2003, and the PhD degree in School of Mathematics and Systems Science from the Beihang University, Beijing, in 2010. Currently, he is an Associate Professor at Beijing Technology and Business University. His research interests include stochastic systems, coordination control of multi-agent systems, and distributed optimization.
He received his B.S. degree in Department of Mathematics, Shihezi University, China, in 2003, and the PhD degree in School of Mathematics and Systems Science from the Beihang University, Beijing, in 2010. Currently, he is an Associate Professor at Beijing Technology and Business University. His research interests include stochastic systems, coordination control of multi-agent systems, and distributed optimization.
Mrs. Xiaolin Yuan
 She received her B.S. degree in School of Science, Beijing Technology and Business University, China, in 2017. Currently, she is pursuing the Master degree in control theory in School of Mathematics and Statistics, Beijing Technology and Business University. Her research interests include coordination control of Fractional order multi-agent systems.
She received her B.S. degree in School of Science, Beijing Technology and Business University, China, in 2017. Currently, she is pursuing the Master degree in control theory in School of Mathematics and Statistics, Beijing Technology and Business University. Her research interests include coordination control of Fractional order multi-agent systems.
Prof. Yingmin Jia
 He received his B.S. degree in Control Theory from Shandong University in 1982, and his M.S. and PhD degrees both in Control Theory and Applications from Beihang University (BUAA), Beijing, China, in 1990 and 1993, respectively. In 1993, he joined the Seventh Research Division at Beihang University, where he is currently a Professor of automatic control. His current research interests include robust control, adaptive control and intelligent control, and their applications in industrial processes and vehicle systems.
He received his B.S. degree in Control Theory from Shandong University in 1982, and his M.S. and PhD degrees both in Control Theory and Applications from Beihang University (BUAA), Beijing, China, in 1990 and 1993, respectively. In 1993, he joined the Seventh Research Division at Beihang University, where he is currently a Professor of automatic control. His current research interests include robust control, adaptive control and intelligent control, and their applications in industrial processes and vehicle systems.
Dr. Shaoyan Guo
 He received his B.S. and M.S. degree in school of Science, Beijing Technology and Business University, China, in 2015 and 2018. Currently, he is a PhD candidate in control science and engineering in Shien-Ming Wu School of Intelligent Engineering, South China University of Technology. His research interests include coordination control of multi-agent systems
He received his B.S. and M.S. degree in school of Science, Beijing Technology and Business University, China, in 2015 and 2018. Currently, he is a PhD candidate in control science and engineering in Shien-Ming Wu School of Intelligent Engineering, South China University of Technology. His research interests include coordination control of multi-agent systems
REFERENCES
Cite this article
TY - JOUR AU - Lipo Mo AU - Xiaolin Yuan AU - Yingmin Jia AU - Shaoyan Guo PY - 2019 DA - 2019/09/18 TI - Mean-square Quasi-composite Rotating Formation Control of Second-order Multi-agent Systems under Stochastic Communication Noises JO - Journal of Robotics, Networking and Artificial Life SP - 89 EP - 96 VL - 6 IS - 2 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.190828.004 DO - 10.2991/jrnal.k.190828.004 ID - Mo2019 ER -