
Hybrid Fuzzy Sliding Mode Control for Uncertain PAM Robot Arm Plant Enhanced with Evolutionary Technique
 , Cao Van Kien3
, Cao Van Kien3- DOI
- 10.2991/ijcis.d.210107.001How to use a DOI?
- Keywords
- Enhanced fuzzy sliding mode (EFSMC) controller; Pneumatic artificial muscle (PAM) robot arm; Lyapunov stability; Differential evolution (DE) technique; Uncertain nonlinear dynamic systems
- Abstract
This paper introduces an enhanced fuzzy sliding mode control (EFSMC) algorithm used for controlling the uncertain pneumatic artificial muscle (PAM) robot arm containing external disturbances. The nonlinear features of investigated PAM robot arm system are approximated using fuzzy logic. Moreover, the coefficients of fuzzy model are optimum selected by evolutionary differential eveloution (DE) technique. The new EFSMC algorithm is designed based on the traditional sliding mode controller in which the adaptive fuzzy rule is developed based on the Lyapunov stability theory and is fuzzified with Mandani fuzzy scheme. As a consequent, the closed-loop stability of nonlinear uncertain PAM robot arm system is guaranteed to follow the global asymptotic stability. Experimental results are shown. It is evident that the proposed adaptive fuzzy rule suitable with the EFSMC controller which ensures an outperforming method in comparison with other advanced control approaches.
- Copyright
- © 2021 The Authors. Published by Atlantis Press B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Fuzzy concept is initiatively proposed by Zadeh in 1965 [1]. Since that date there were numerous researches focused on this section. Then it also existed different fuzzy-based applications in various technological domains [2]. Fuzzy concept has been efficiently used in control, identification domain, and so on. Among various fuzzy structures, Takagi–Sugeno (T-S) fuzzy logic is widely using in control and identification purposes. Especially, it can be efficiently combined with soft-computing algorithms [3].
In another way, sliding mode control (SMC) is now successfully used in numerous applications. The distinguished benefit of SMC control is the robustness against uncertain nonlinear disturbances. A SMC, in term of its on-off rules, confirms an asymptotic stability to the tested uncertain scheme. Hence SMC approach has been efficiently used in versatile technological applications [4,5]. Nevertheless the principal drawback of SMC induced from its on-off control issue, namely chattering effect. In order to remove such phenomenon, a saturated equation is often used [3] linked to the sliding surface. The disadvantage of this is that such linkage can spoil Lyapunov asymptotical stability of the investigated nonlinear system. Thus standard SMC method encounters drawback in control of uncertain disturbances. A combined Fuzzy-SMC controller can be used to solve this difficulty. Then several adaptive fuzzy SMC approaches [6–9] proposed in which fuzzy rules were implemented based on Lyapunov principle. As a consequent numerous researches have introduced the hybrid fuzzy SMC algorithms of which the closed-loop system stability is partly proved [9–13]. The merit of this hybrid system is focused on the fact that the adaptive fuzzy laws conduct fuzzy systems to arbitrarily approximating functions. Moreover, in order to successfully approximate a complex nonlinear system, it needs a great amount of fuzzy rules from the constructed fuzzy set. As a result, a tremendous number of fuzzy rules will take a great burden of computational cost. Then it raises the demand of a novel adaptive fuzzy rule innovatively and effectively used to a fuzzy SMC algorithm as to successfully adjust the characteristics of the adaptive fuzzy laws with an adequate computation load.
One of promising fuzzy models recently developed relates to the multilayer fuzzy structure which is improved from hierarchical fuzzy one [14,15] in which the output of the previous fuzzy layer is the input of the following one with the last output is through a fuzzy model. Nowadays the hierarchical fuzzy model is increasingly improved and successfully applied in the field of intelligent identification and control [16–18] such as Kien et al. [19,20] optimized the multilayer fuzzy logic identify the nonlinear uncertain double-coupled water tanks system by using cascade training method.
Nowadays evolutionary and meta-heuristic optimization algorithms have been increasingly applied to optimally identify the parameters of intelligent controllers used in numerous optimization problems. Precup et al. [21] introduced a new adaptive GSA-based algorithm as for optimally modifying of PI controlled uncertain servo systems. Wang and Guo [22] proposed a new hybrid bat algorithm with harmony search for global optimization of uncertain nonlinear systems. Fe et al. [23] applied specific soft-computing methods for automatic selection of optimum parameters of micro-milling processes, and so on.
Nowadays modified versions of particle swarm optimization (PSO) and differential evolution (DE) algorithms have shown convincingly as the most promising candidates among meta-heuristic algorithms in efficiently solving optimization problems. Tharwat and Hassanien [24] introduced a new quantum-behaved particle swarm optimization (QPSO) for parameter optimization of SVM processes. Beruvides et al. [25] proposes an improved cross-entropy PSO method for parameter optimization of a micro-scaled manufacturing process. Anh and Kien [26] suggested a new way for optimal energy management of hybrid micro-grid system using advanced multi-objective PSO. Author in [27] introduced an approach for identifying parameters using modified PSO of a Fuzzy NARX IMC structure for MISO dynamic system control. Authors in [28] applied DE technique for optimizing parameters of an adaptive evolutionary neural controller used in an uncertain nonlinear serial PAM robot system. Son et al. [29] applied a hybrid fuzzy LQR-SMC technique optimized with modified DE to control uncertain nonlinear systems. Recently, several advanced intelligent digital twin-based controllers, including fault-tolerant tracking T-S fuzzy-based control against sensor faults introduced by Kukurowski et al. [30] and digital twin-based optimal fuzzy control proposed by Guerra et al. [31], Lermer and Reich [32], have obtained promising results in adaptively and precisely optimal control of highly uncertain nonlinear systems. Several of those control approaches have been also supported on MatLab/RTW.
Improving from results abovementioned this paper innovatively introduce a new adaptive law applied in the enhanced fuzzy EFSMC that is efficiently applied with outstanding quality and superb accuracy for tracking guide of uncertain dynamic plants, including the 1-DOF pneumatic artificial muscle (PAM) manipulator investigated in this paper.
The contributed aspects of this paper are tri-fold as follows:
Propose adaptive fuzzy rules of novel fuzzy EFSMC approach innovatively implemented for the PAM-based manipulator modeling and control.
Propose candidate Lyapunov function and exactly prove the asymptotically convergent property for the nonlinear PAM manipulator based on Lyapunov stability principle.
Propose DE algorithm to optimally identify the parameters of fuzzy EFSMC control.
The rest of this paper is structured as follows: Section 2 presents problem statement. Section 3 introduces the novel adaptive fuzzy SMC algorithm for PAM manipulator robust control. Section 4 proposes new adaptive fuzzy rules used in proposed fuzzy EFSMC controller. Section 5 relates to the experiment set-up in which the fuzzy structures optimized by DE method and the experiment tests on the PAM-based robot arm system are fully presented. Eventually, Section 6 is conclusions.
2. PROBLEM PRESENTATION
The mathematical description of a SISO n-th nonlinear system is described as follows:
The control motivation is to implement an efficient control rule as to x exactly tracking a required referential value xd.
The error is calculated by (2)
Then the sliding plane is chosen as
Based on Lyapunov principle,
Replacing (6) in (5), the fuzzy SMC control rule is written as in (7)
The
The sliding mode approach needs mathematical form of
3. PROPOSED ENHANCED FUZZY EFSMC APPROACH
3.1. Design the Fuzzy SMC Control
For designing the SMC control used to uncertain plant control with undetermined
In this paper, the unknown functions
Then the error of real model and identified one is computed with (10)
Continually by using (8), the fuzzy SMC controller is described with (11)
In practice, since
We assume that if
3.2. Proposed Enhanced Fuzzy EFSMC Method
We proposed a novel fuzzy adaptive (FA) law to guarantees the error of system which surely converges to 0 with constraints. Then the proposed FA law is added into state space model as follows:
Based on Eqs. (11) and (12), the proposed fuzzy SMC rule can be determined as
The error in Eq. (10) is rewritten as
Give,
Let's assume,
Supposing that
Using the state equations in (12) and the derivative of the SMC surface in (5), it induces
Now we propose the candidate Lyapunov function as (24)
The derivative of V with respect to time,
Using (17), it gives
Suppose we use the Fuzzy model for approximating the
The main subject in this paper is to initiatively introduce a fuzzy logic optimally approximate the operation of Eq. (18). Original functions are convoluted with high-order derivation, containing different terms. Thus the new fuzzy model is completely compact and well respond to Lyapunov criterion. The principle of newly proposed adaptive fuzzy law is implemented based on following Table 1.
| em | |||
|---|---|---|---|
| NE | ZE | PO | |
| NE | ZE | PO |
Proposed adaptive fuzzy rules.
In which PO is positive and NE is negative, both are selected in order to respond the requirement
4. EXPERIMENTAL RESULTS
4.1. Experimental Setup
The EFSMC control algorithm is applied to control the uncertain 1-DOF PAM-based manipulator. It is known that the PAM actuator is activated based on air in compression. In case a certain pressure is used, PAM shrinks and provides a force. In case pressure is not held, PAM returns to its initial form.
Up to now, there has not existed an efficient strict model to exactly describe the highly nonlinear features of PAM. Then intelligent approaches are often used to identify the PAM-based robot-arm model. Such intelligent model is considered as an effective approach as to be able to effectively control the PAM.
The PAM-based 1-DOF manipulator configuration is a SISO uncertain nonlinear plant that combines “one PAM - one bias spring” linkage and then functions as a SCARA robot. The 1-DOF PAM manipulator configuration is illustrated in Figure 1. The abovementioned configuration includes a single input variable which denotes the voltage-based electro-pneumatic regulator, and a single output which denotes the angular rotation measured via an incremental encoder.
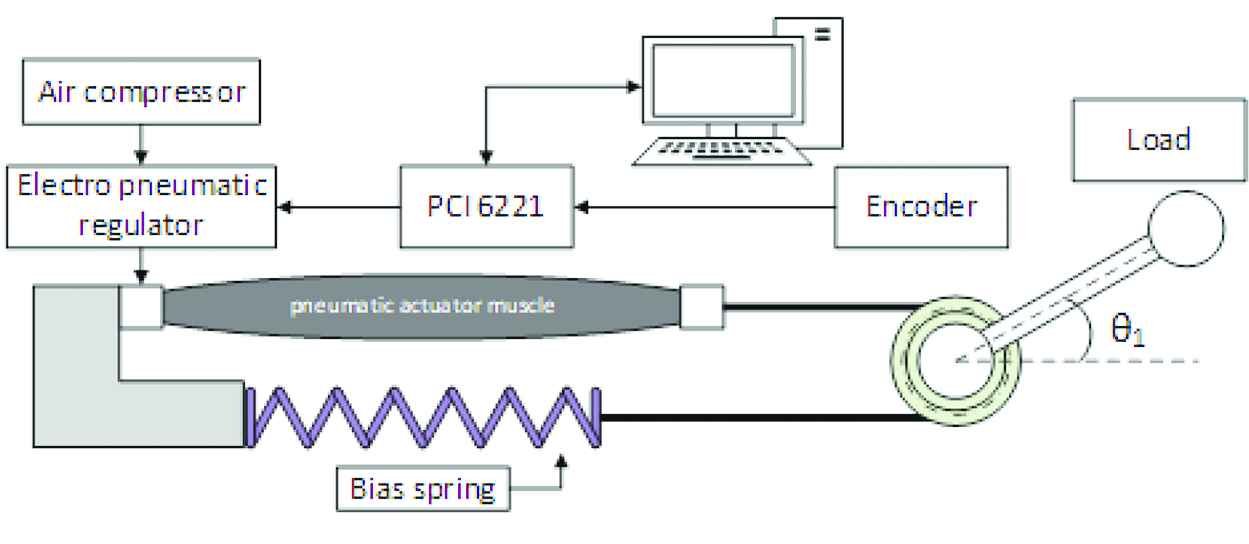
The 1-DOF pneumatic artificial muscle (PAM) manipulator configuration.
Figure 1 presents the arrangement of the experimental 1-DOF PAM manipulator. In this arrangement, one PAM actuator with one bias-spring form is used. An encoder is used for measuring the coupling angle. The PCI-6221 card provides a control voltage to regulate the PAM pressure and gathers data under sampled time of 10 [ms]. Link-length is 20 cm. The load weight is 500 g. The working range of manipulator is bounded in range of 1 rad. Then the steps of EFSMC controller design are as follows:
Estimate the
Determine the maximum value of
Building Adaptive Fuzzy model.
Let's define the nonlinear system of the 1-DOF PAM manipulator as (25)
The functions
Figure 2 illustrates the block diagram described the proposed EFSMC control algorithm, where
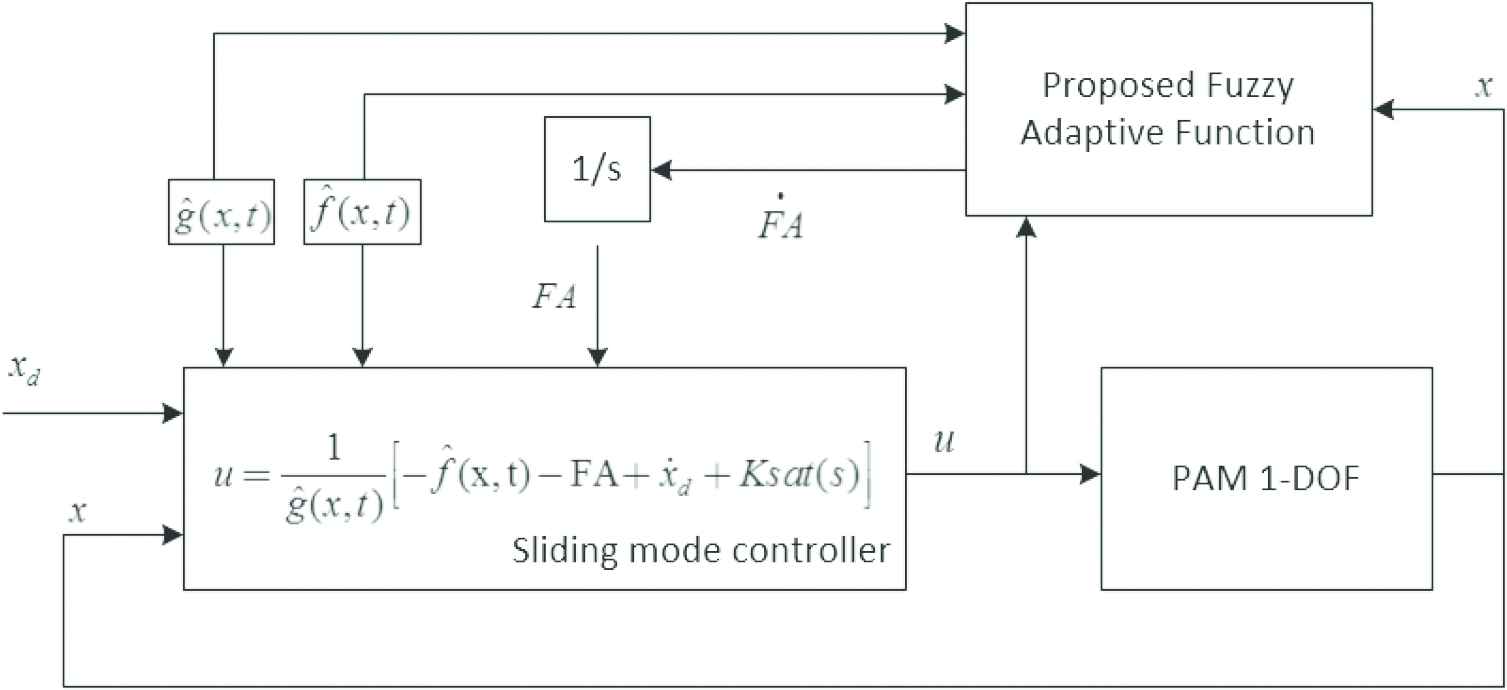
Block diagram for proposed adaptive fuzzy enhanced fuzzy sliding mode control (EFSMC) control system.
4.2. Training Unknown Functions of Uncertain System
In control law Equation (26), we have unknown
The data set was collected with random input voltage from 0 to 6V in no-load operation.
Thus the fitness function is defined and calculated in (27)
In the identification process, the adaptive fuzzy function was not used and equal zero. The DE algorithm was used for optimizing parameters of Fuzzy T-S models used in approximating of

Block diagram of differential evolution (DE) technique.
The essential stages of DE technique will be concisely presented as follows:
4.2.1. Initializing phase
This initial vector is selected at random composing of NP D-sized and covers the whole coefficient area.
4.2.2. Mutating phase
DE provides novel parametric vectors by adding the weighting offset of 2 population sets into a 3rd one, namely mutation stage. With every aim-vector
The randomly selected
4.2.3. Crossover phase
After providing the off-spring vector via mutating phase, the crossover phase is activated to improve the versatility of the particle space. The donation vector bargains its elements with the target one
In this paper the originally initiated DE coefficients F and C are equal
4.2.4. Selecting phase
To specify if it can participate as a generation element
4.2.5. Terminating phase
This phase aims to terminate the DE loop. The DE loop is ended in case one of followed requirements is met:
The maximal iterations reached.
The best obtained fitness value is better than a chosen minimum one.
The best obtained fitness value cannot be improved for an enough long generations.
Data for training and evaluation is gathered from different data set. Input and output data were collected in real experiment without load.
Fuzzy T-S logic used for the approximation
Figures 4 and 5 show proposed T-S fuzzy scheme presented in Simulink for approximating

Proposed Takagi–Sugeno (T-S) fuzzy model for identifying

Proposed Takagi–Sugeno (T-S) fuzzy model for identifying
The verifying resulted graphs are presented in Figure 6. It is important to note that this verifying process using different data sets selected from the training data set.
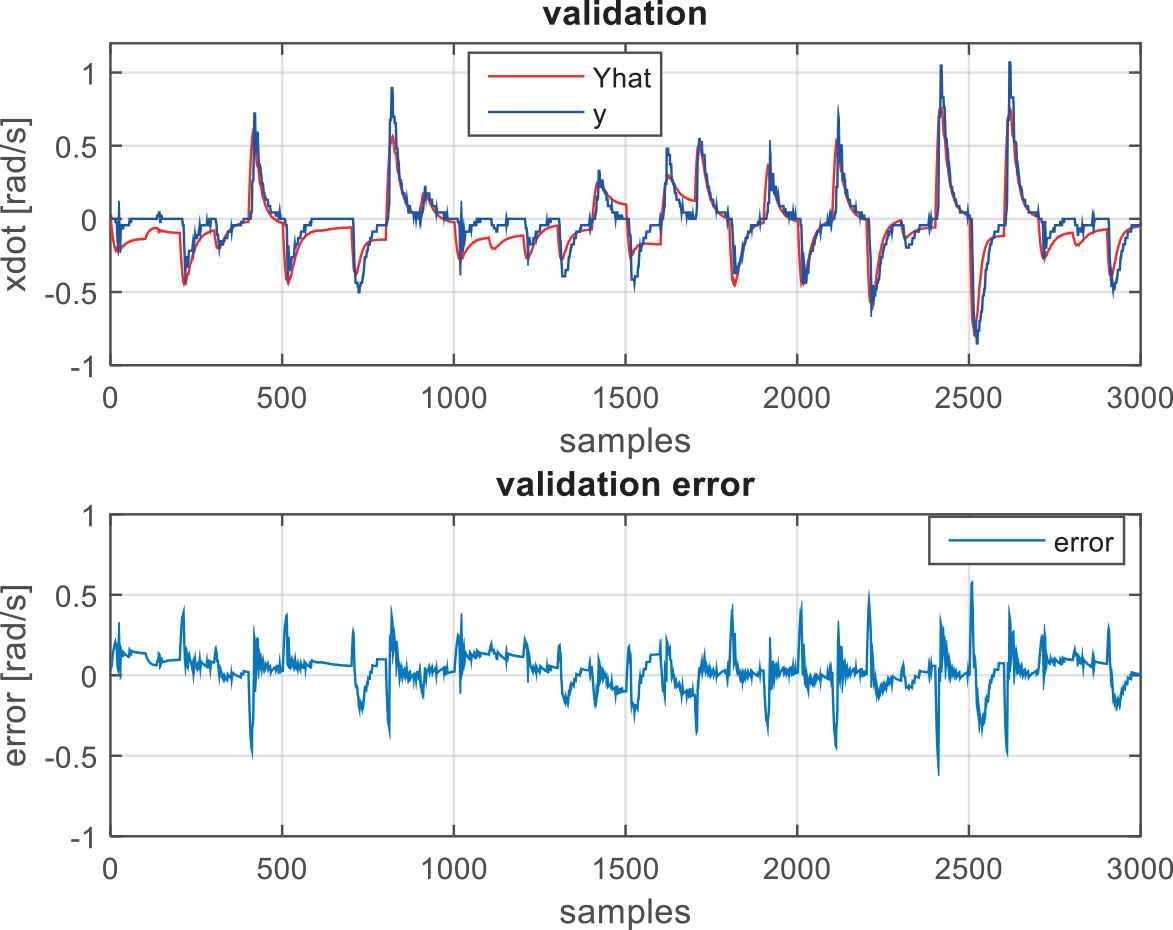
Validation result.
Figures 7 and 8 show the final results related to the novel fuzzy structure applied to estimate
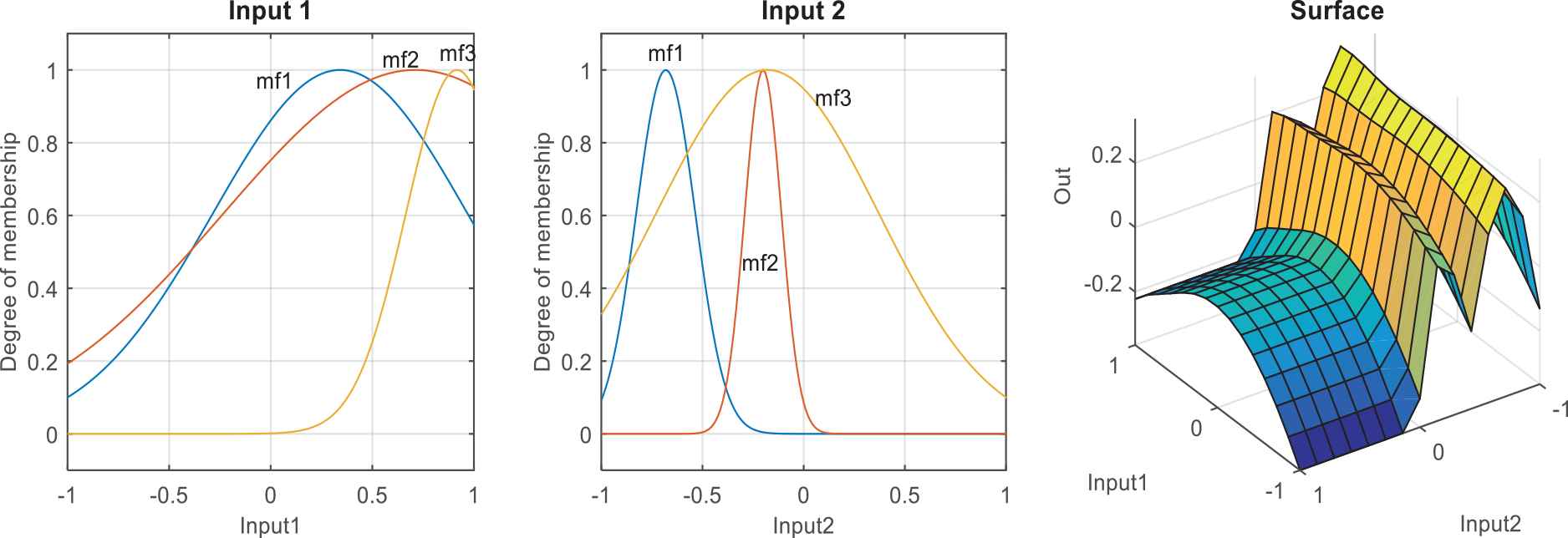
Input/output of resulted Takagi–Sugeno (T-S) fuzzy model and surface of uncertain
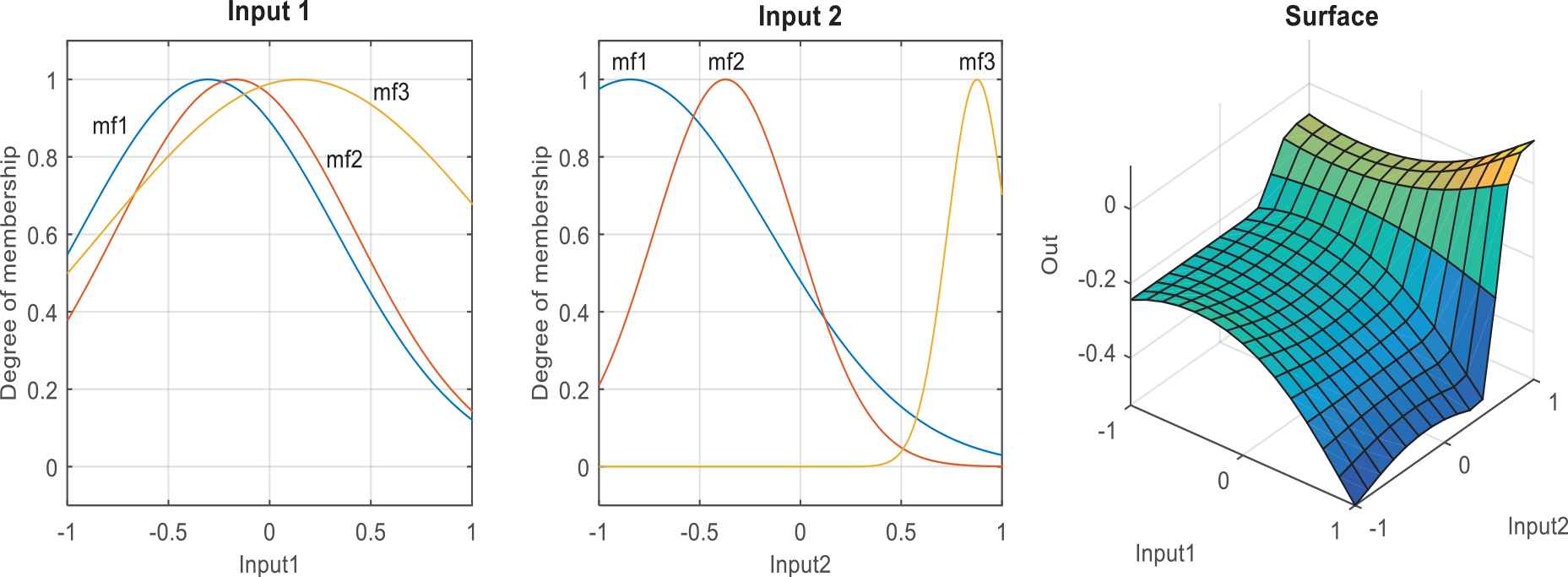
Input/output of resulted Takagi–Sugeno (T-S) fuzzy model and surface of uncertain
4.3. Implementation of Proposed Fuzzy EFSMC Control Law
The adaptive Fuzzy law makes sure error of actual and fuzzy output converges to zero. Base on training and evaluation results, we can define the boundary of
The Mamdani fuzzy model is applied in the new fuzzy model design which contains 1 input/1 output. Input value is the difference of actual with predicted output values. It is also clear to note that the output value of proposed fuzzy structure is derivation of adaptive value (
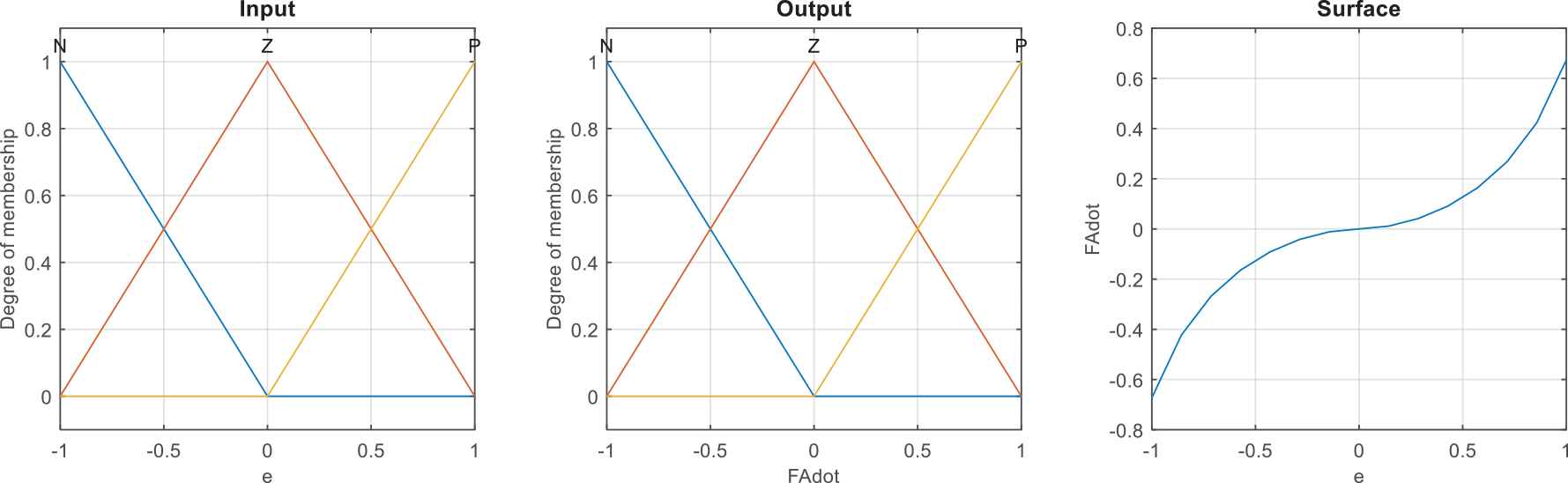
MF and surface of proposed fuzzy law.
The fuzzy rules are selected and adequately presented in Table 1.
In Figure 10, proposed fuzzy rule contains a saturating component located in the input as to ensure all values go to the input belong to the range of [−1, 1]. Meanwhile the output contains a variable-valued gain G, called the punishing rate for modifying convergent time with respect to fuzzy model output.
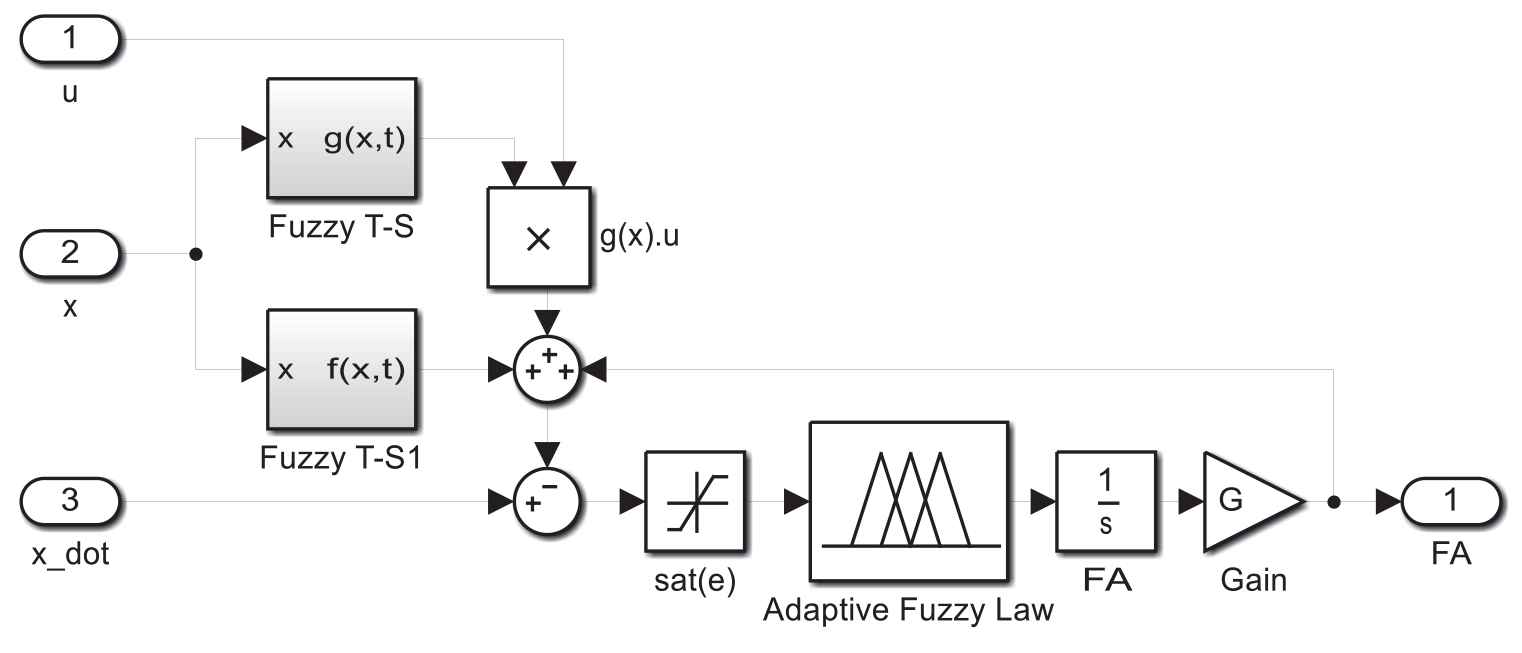
Design of fuzzy rule diagram.
4.4. Experimental Results
Experiments applied in the 1-DOF PAM-based manipulator system are performed in both cases, no-load and pay-load with value of 500 g. For each experiment, we performed 3 times with different controllers in comparison between proposed EFSMC with standard fuzzy and optimal PID control methods. It is necessary to note that all three comparative controllers used the identical referential data.
The comparison is realized with classic fuzzy and optimal PID control approaches. The PID parameters are optimally designed as
Figures 11 and 12 illustrate the comparative results of proposed EFSMC with optimal PID and fuzzy PID controllers applied in the PAM-based robot arm in two cases, no-load and pay-load of 0.5 kg respectively.
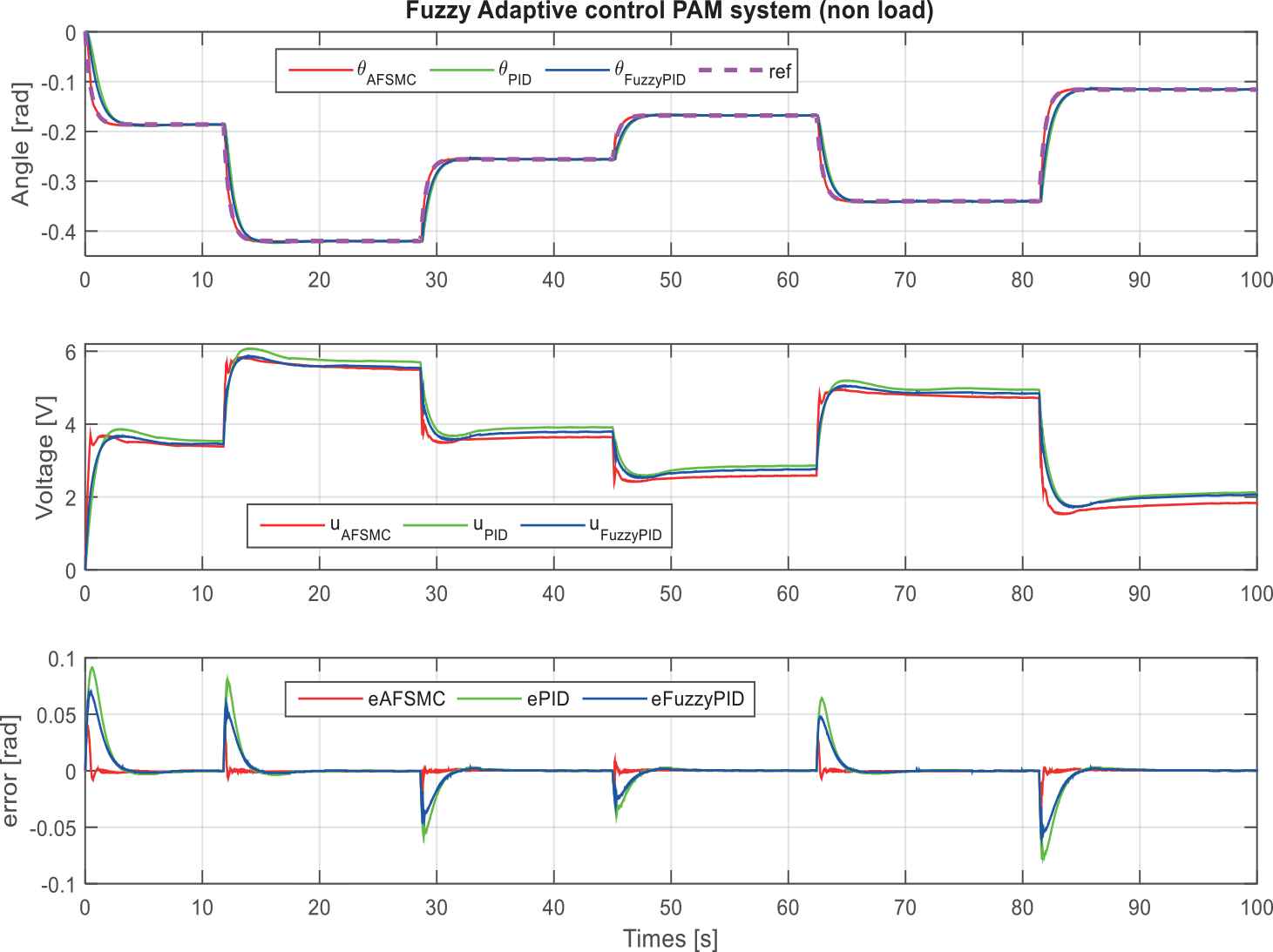
Comparative results of proposed enhanced fuzzy sliding mode control (EFSMC) with optimal PID and fuzzy PID controllers in no-load operation.
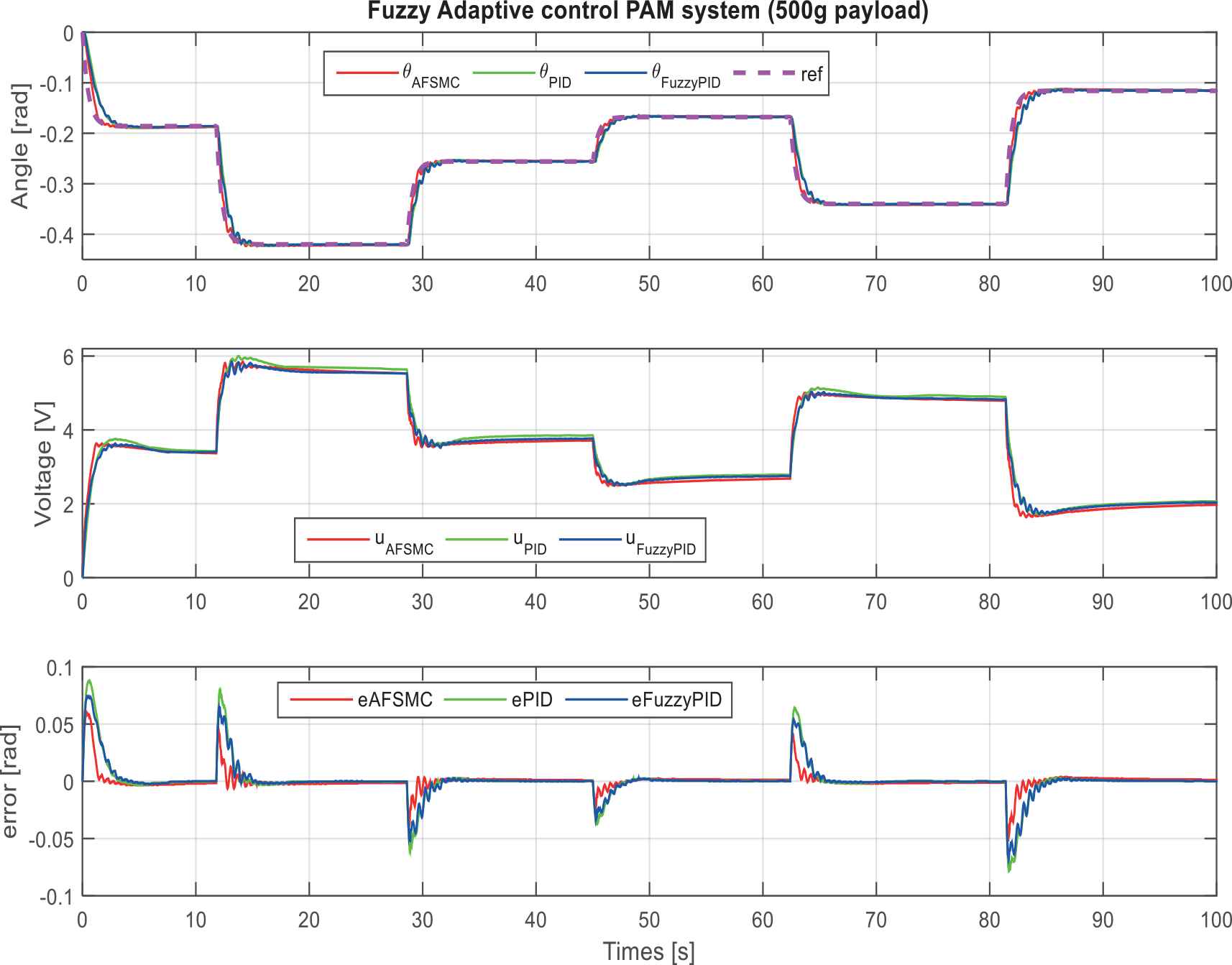
Comparative results of proposed enhanced fuzzy sliding mode control (EFSMC) with optimal PID and fuzzy PID controllers in case pay-load of 0.5 kg.
The results presented in Figure 11 comparatively show the performance of tested control methods in no-load operation of the 1-DOF PAM robot arm. The comparative results convincingly demonstrate that the proposed EFSMC method give the best performance among the 3 tested control approaches. The tracking angular error of proposed EFSMC method seems perfectly quite small, especially in transient-state durations, in comparison with poorly transient response of optimal PID and fuzzy PID controllers. Hence it is clear to see that the referential values and real output values of proposed fuzzy model are strongly similar. On the contrary optimal PID and fuzzy PID controllers show a large marginal error at the moments the reference signal abruptly changes.
The superiority of proposed EFSMC in comparison with optimal PID and fuzzy PID controllers in case of pay-load 0.5 kg is clearly shown in Figure 12. The results presented in this figure demonstrate the perfect performance of proposed EFSMC controllers applied to the uncertain 1-DOF manipulator system in pay-load operation. Due to the increase of load weight, the uncertainty of the PAM robot arm system becomes dramatic which is totally subjugated by proposed EFSMC method. The superiority of EFSMC control over optimal PID and fuzzy PID control approaches in pay-load PAM robot arm operation strongly verifies the robustness of the proposed EFSMC technique.
Furthermore, the experiment results are clearly tabulated in Table 2 based on the mean square error (MSE) standard in which the proposed controller proves the best performance in comparison with other optimal PID and fuzzy PID controllers.
| Method | Mean Square Error (No-load) | Mean Square Error Rated Load (500 g) |
|---|---|---|
| Proposed EFSMC | 0.0952 | 0.5878 |
| Optimal PID | 2.5276 | 2.6905 |
| Adaptive Fuzzy PID | 1.4009 | 1.8930 |
Comparative performance of investigated controllers applied on the PAM-1DOF system.
The results from Table 2 convincingly demonstrate the superiority of proposed AFSMC controller over other comparative advanced control methods, not only in no-load condition (MSE error value 0.0592 of proposed EFSMC over 2.5276 and 1.4009 of optimal PID and adaptive fuzzy PID, respectively) but also in rated load condition (MSE error value 0.5878 of proposed EFSMC control over 2.6905 and 1.8930 of optimal PID and adaptive fuzzy PID controller, respectively).
In summary the experiment results confirm that the proposed EFSMC yields the outperforming performance and proves its robustness at all transient durations in comparison with other advanced control methods.
5. CONCLUSIONS
This paper proposes a novel enhanced fuzzy rule for conventional fuzzy SMC method, which applied for robust controlling an uncertain PAM-based manipulator. The new hybrid fuzzy SMC algorithm, whose adaptive fuzzy structure coefficients are optimally identified by DE algorithm. The newly proposed fuzzy law is successful in term of controlling uncertain nonlinear system to precise tracking a referential value. The result of tracking reference trajectory of new algorithm is verified not only on computer simulation but also on an actual 1-DOF PAM-based robot arm system. Compared to fuzzy PID technique, proposed adaptive EFSMC method gives a better result in both performance and robustness. Moreover, the stability of PAM manipulator in operation will be ensured since the perfect satisfaction of EFSMC method with Lyapunov stability criterion. As a consequent, proposed EFSMC algorithm ensures an efficient tool for controlling a wide range of uncertain dynamic structures.
CONFLICTS OF INTEREST
Authors confirm that there is no any conflict of interest related to the content of this paper.
AUTHORS' CONTRIBUTIONS
Contributions of author Ho Pham Huy Anh focus on editing and revising. Contributions of author Cao Van Kien focus on original idea, simulating and experimenting resulted preparation and revising
ACKNOWLEDGMENTS
This paper is funded by Vietnam National University of Ho Chi Minh City (VNU-HCM) under grant number B2020-20-04. We acknowledge the support of time and facilities from Ho Chi Minh City University of Technology (HCMUT), VNU-HCM for this study.
REFERENCES
Cite this article
TY - JOUR AU - Ho Pham Huy Anh AU - Cao Van Kien PY - 2021 DA - 2021/01/15 TI - Hybrid Fuzzy Sliding Mode Control for Uncertain PAM Robot Arm Plant Enhanced with Evolutionary Technique JO - International Journal of Computational Intelligence Systems SP - 594 EP - 604 VL - 14 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.d.210107.001 DO - 10.2991/ijcis.d.210107.001 ID - Anh2021 ER -