
Evolutionary Multimodal Optimization Based on Bi-Population and Multi-Mutation Differential Evolution
 , Yaochi Fan1, Qingzheng Xu3
, Yaochi Fan1, Qingzheng Xu3- DOI
- 10.2991/ijcis.d.200826.001How to use a DOI?
- Keywords
- Differential evolution; Multi-mutation strategy; Fitness Euclidean-distance ratio; Multimodal optimization problems
- Abstract
The most critical issue of multimodal evolutionary algorithms (EAs) is to find multiple distinct global optimal solutions in a run. EAs have been considered as suitable tools for multimodal optimization because of their population-based structure. However, EAs tend to converge toward one of the optimal solutions due to the difficulty of population diversity preservation. In this paper, we propose a bi-population and multi-mutation differential evolution (BMDE) algorithm for multimodal optimization problems. The novelties and contribution of BMDE include the following three aspects: First, bi-population evolution strategy is employed to perform multimodal optimization in parallel. The difference between inferior solutions and the current population can be considered as a promising direction toward the optimum. Second, multi-mutation strategy is introduced to balance exploration and exploitation in generating offspring. Third, the update strategy is applied to individuals with high similarity, which can improve the population diversity. Experimental results on CEC2013 benchmark problems show that the proposed BMDE algorithm is better than or at least comparable to the state-of-the-art multimodal algorithms in terms of the quantity and quality of the optimal solutions.
- Copyright
- © 2020 The Authors. Published by Atlantis Press B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
In the area of optimization, there has been a growing interest in applying optimization algorithms to solve large-scale optimization problems, multimodal optimization problems (MMOPs), multiobjective optimization problems (MOPs), constrained optimization problems, etc. [1–6]. Different from unimodal optimization, multimodal optimization seeks to find multiple distinct global optimal solutions instead of one global optimal solution. When multiple optimal solutions are involved, the classic evolutionary algorithms (EAs) are faced with the problem of maintaining all the optimal solutions in a single run. It is difficult to realize because the evolutionary strategies of EAs make the entire population converge to a single position [7]. For the purpose of locating multiple optima, a variety of niching methods and multiobjective optimization methods incorporated into EAs have been widely developed. The related techniques [8–16] include classification, clearing, clustering, crowing, fitness sharing, multiobjective optimization, neighborhood strategies, restricted tournament selection (RTS), speciation, etc. These techniques have successfully enabled EAs to solve MMOPs. Nevertheless, some critical issues still remain to be resolved. First, some radius-based niching methods introduce new parameters that directly depend on the problem landscapes. The performance of algorithm often deteriorates when the selected parameters do not match the problem landscapes well. Second, some niching techniques employ sub-populations. However, the sub-populations may suffer from the genetic drift or they may be wasted to discover the same solution for some problems with complex landscapes. Third, when an offspring and its neighbor both sit on different peaks, either one of two peaks will be lost because only the winner can survive.
Diversification and intensification are two major issues in multimodal optimization [17]. The purpose of diversification is to ensure sufficient diversity in the population so that individuals can find multiple global optima. On the other hand, intensification allows individuals to congregate around potential local optima. Consequentially, each optimum region is fully exploited by individuals. As a popular EA, differential evolution (DE) has shown to be suitable for finding one global optimal solution. However, it is inappropriate for finding multiple distinct global optimal solutions [2]. The one-by-one selection used in DE does not consider selecting individuals according to different peaks, which has disadvantage for diversity preservation. Moreover, it is a dilemma to choose an appropriate mutation scheme that favors both diversification and intensification. To solve these drawbacks, we propose a novel multimodal optimization algorithm (BMDE). Specifically, bi-population evolution strategy, multi-mutation strategy, and update strategy are proposed to help BMDE to accomplish diversification and intensification for locating multiple optimal solutions. The novelties and advantages of this paper are summarized as follows:
Bi-population Evolution Strategy: From the optimization perspective, the parent and its offspring compete to decide which one will survive at each generation. Losers will be discarded. However, historical data is usually beneficial to improve the convergence performance. In particle swarm optimization (PSO) [18], the previous best solutions of each particle are used to direct the movement of the current population. In addition, research shows that the difference between the inferior solutions and the current population can be considered as a promising direction toward the optimum [19]. Motivated by this consideration, we are interested in a set of individuals who fail in competition and consider their difference from the current population. More precisely, this paper employs two population to perform multimodal optimization in parallel. One population is employed to save the individuals who win in the competition, denoted as evolution population. The other population is employed to save the individuals who fail in the competition, denoted as inferior population. The evolution population may bear stronger exploitation capability. The inferior population may help to maintain the population diversity, which can avoid losing the potential global optima found by the population. In addition, inferior population can prevent the loss of potential optima due to replacement error.
Multi-mutation strategy: Generally, the performance of DE often deteriorates with the inappropriate choice of mutation strategy. Therefore, many mutation strategies have been designed for different optimization problems. In this paper, we introduce a multi-mutation strategy, which includes two effective mutation strategies with stronger exploration capability. Consequently, it is more suitable for solving multimodal problems.
Update strategy: As evolution proceeds, the population will move toward the peaks (global optima). If the number of individuals around a peak is too small, the population may not be able to find highly accurate solutions due to their poor capability of diversity preservation. Conversely, if the number of individuals around a peak is too large, many individuals will do duplication of labor, thus wasting the calculation cost. Moreover, the best individual will take over the population’s resources and flood the next generation with its offspring. To address this problem, the update strategy is employed to eliminate the individual with high similarity and generate new individuals.
To assess the performance of the proposed algorithm, extensive experiments are conducted on CEC2013 multimodal benchmark problems [20], in comparison with thirteen state-of-the-art algorithms [2,13,21–25] for multimodal optimization. The experimental results show that the proposed method is promising for solving MMOPs.
The rest of this paper is organized as follows: Section 2 reviews the multimodal optimization formulation. In Section 3, we introduce the basic framework of DE algorithm and review some background knowledge of multimodal optimization techniques. In Section 4, the details of the proposed algorithm are described. Experiments are presented in Section 5. Section 6 gives the conclusion and future work.
2. MULTIMODAL OPTIMIZATION FORMULATION
An optimization problem which have multiple global and local optima is known as MMOP. Without loss of generality, MMOP can be mathematically expressed as follows:
3. RELATED WORK
A. Differential Evolution
DE [26] is a very competitive optimizer for optimization problems. The key steps of DE algorithm are initialization, mutation, crossover, and selection, which are briefly introduced below.
Initialization: For an optimization problem of dimension D, a population x of NP real-valued vectors (or individuals) is typically initialized at random in accordance with a uniform distribution in the search space S. The jth decision variable of the ith individual at generation g can be initialized as follows:
where Lj and Uj are the lower and upper bounds of jth dimension, respectively. rand represents a uniformly distributed random number in the range of (0,1).Mutation: In each generation, a mutant vector is formed for each individual based on scaled difference individuals. The frequently used mutation operators are listed below.
“DE/rand/1”
“DE/best/1”
“DE/rand/2”
“DE/best/2”
“DE/current-to-best/1”
“DE/current-to-rand/1”
where i = 1,…,NP, r1, r2, r3Crossover: DE employs a binomial crossover operation on the target vector xi and the mutant vector vi to form a trial vector ui as follows:
where jrand is randomly selected from [1, D] to ensure that the trial vector has at least one dimension differ from the target vector. Cr is the crossover rate lying in the range of [0, 1].Selection: The selection operator is employed to decide which one is to survival in the next generation through a one-to-one competition between the target vector and its trial vector. Take the maximization optimization problem as an example, the selection process can be outlined as
where
As mentioned before, DE or other EAs have been employed for multimodal optimization. However, it is difficult for the algorithms to locate all the global optima in a run. On the one hand, the algorithm should maintain sufficient diversity to ensure the individuals to spread out widely within the search space. On the other hand, the individuals gather around potential local optima to fully exploit each optimum region. Therefore, it is greatly desirable for DE or other EAs to make a balance between exploration (diversity) and exploitation (convergence).
B. Niching Techniques for Multimodal Optimization
Niching is a concept derived from biology and refers to a living environment. The species evolve in different living environments. In terms of MMOP, niching refers local regions around an optimum. A brief review of representative niching techniques is given in the following.
The crowding strategy proposed by De Jong is one of the simplest niching techniques for MMOPs. The advantage of this strategy is that it can maintain the diversity of the whole population. However, the potential optimal solution will be replaced if the offspring is a superior solution. This phenomenon is called replacement error. To overcome this problem, deterministic crowding and probabilistic crowding, two improvement strategies to the original crowding, are proposed [11,27]. The deterministic crowding can effectively reduce replacement errors, while probabilistic crowding can prevent the loss of niches with lower fitness or loss of local optima. Nevertheless, the disadvantage of probabilistic crowding is slow convergence and poor fine searching ability. The restricted tournament selection (RTS) employs Euclidean or Hamming distance to find the nearest member within the w (window size) individuals. Similar to crowding, RTS can ensure the population diversity by the competition between similar individuals. However, this strategy suffers from the replacement error.
Both the fitness sharing strategy and speciation employ the grouping method. More precisely, the population is divided into different sub-populations according to the similarity of the individuals. The advantage of fitness sharing strategy is the stable niches maintained. However, the niche radius
In order to improve the niching techniques mentioned above, the neighborhood base CDE (NCDE) and the neighborhood based SDE (NSDE) are proposed in [2]. However, a new parameter m, which is the neighborhood size, is introduced in NCDE and NSDE. In order to relieve the influence of the parameter, Biswas et al. [28] introduced an improved local information sharing mechanism in niching DE, where the neighborhood size is dynamically changed in a nonlinear way. Shir et al. [25] proposed a niching variant of the covariance matrix adaptation evolution strategy (CMA-ES), where a technique called dynamic peak identification (DPI) is used to split the population into species. The number of niches, that is, the number of peaks of optimization problem, is predefined in DPI. However, it is practically difficult to know in advance the number of peaks that exist within the landscape of optimization problem.
C. Novel Operators for Multimodal Optimization
Wang et al. [29] introduced a dual-strategy mutation scheme in DE to balance exploration and exploitation in generating offspring. Moreover, in order to select suitable individuals from different clusters, an adaptive probabilistic selection mechanism based on affinity propagation clustering is proposed. In order to eliminate the requirement of prior knowledge to specify certain niching parameters, Qu et al. [14] proposed a distance-based locally informed particle swarm (LIPS) optimizer. LIPS employs the Euclidean-distance-based neighborhood information to guide the search process. Therefore, LIPS is able to form different stable niches and locate the desired peaks with high accuracy. However, the neighborhood size that influences the performance of the proposed LIPS is difficult to exactly specify. A larger neighborhood size is suitable for convergence while a smaller neighborhood size is suitable for maintaining the diversity of the population. To achieve a balance between local exploitation and global exploration with speciation niching technique, Hui et al. [30] proposed an ensemble and arithmetic recombination-based speciation differential evolution algorithm (EARSDE), in which the arithmetic recombination is used to enhance exploration and the neighborhood mutation is employed to improve exploitation of individual peaks. Haghbayan et al. [3] proposed an improved niching strategy which employs a nearest neighbor scheme and hill valley algorithm to control the interaction between GSA agents. Fieldsend et al. [31] proposed the niching migratory multi-swarm optimizer (NMMSO) which dynamically manages many particle swarms. In NMMSO, multiple swarms which have strong local search continuously merge and split in the search landscape. More precisely, the swarms will split if new regions are identified. In addition, they merge to prevent duplication of labor. Li [22] proposed RPSO (including r2PSO and r3PSO) by employing ring topology which using individual particles’ local memories to form a stable network. The network can retain the best particles which explore the search space more broadly.
D. Multiobjective Optimization Techniques for Multimodal Optimization
Similar to MOPs, a MMOP involves multiple optimal solutions. Therefore, a few attempts have been made to solve MMOPs by taking advantage of multiobjective optimization in maintaining good population diversity. For instance, Wang et al. [13] proposed a novel transformation technique MOMMOP which transforms an MMOP into an MOP with two conflicting objectives. Moreover, MOMMOP finds a trade-off between exploitation and exploration by balancing the decision variable and the objective function. Basak et al. [32] brought up a novel bi-objective formulation of the MMOP, in which the mean distance-based selection mechanism is chosen as the second objective to prevent the entire population from converging to a single optimum. Yao et al. [17] proposed a bi-objective multipopulation generic algorithm which employs a novel bi-objective mechanism and a multipopulation scheme to realize exploration. Therefore, the sub-populations of BMPGA are evolved toward two objectives separately and simultaneously instead of toward a single fitness objective. Li [33] introduced a multiobjective optimization method into the matrix adaptation evolution strategy (MA-ES) to solve MMOPs.
4. BMDE FOR MMOP
A. Framework of BMDE
The main framework of the proposed BMDE is summarized in Algorithm 1, from which we can see that BMDE is composed of three main strategies: (1) bi-population strategy; (2) multi-mutation strategy; and (3) update strategy. In bi-population evolution strategy, one population consists of the individuals with higher fitness value is employed for exploitation, while the other population which consists of the individuals with lower fitness value is used for exploration. Then, a multi-mutation strategy is employed to improve the solution accuracy and find more optimal solutions. Finally, update strategy is performed to generate new individuals to replace those with high similarity. The following sections will detail the three main strategies in Algorithm 1 successively.
Algorithm 1: Framework of BMDE
1: Initialize the population and set the parameters
2: Evaluate the fitness of the individuals in the population
3: while termination criteria is not satisfied
4: Multi-mutation strategy (Algorithm 2)
5: Bi-population evolution strategy (Algorithm 3)
6: Update strategy (Algorithm 4)
7: end while
B. Multi-Mutation Strategy
DE has been proved to be an efficient algorithm in the past two decades due to its powerful global optimization properties on a wide range of problems, and its simplicity [34]. Here, we exploit the DE algorithm for multimodal optimization. As mentioned before, there are several widely used mutation strategies of DE. Different mutation strategies have different characteristics. DE/rand/1 and DE/rand/2 have a high diversity to avoid premature convergence. However, their convergence rate is poor. DE/best/1 and DE/best/2 perform better in convergence rate, however, they are easy to be trapped in local minima. As for DE/current-to-best/1 or DE/current-to-rand/1, it can be employed as a mixed strategy that combines a current individual and a best individual (or a rand individual) as the origin individual and the terminal individual, respectively to form a composite base vector [30]. DE/current-to-best/1 and DE/current-to-rand/1 can escape from local minima with better diversity than DE/best/1 and DE/best/2.
As shown previously, niching is an effective technique to locate multiple optima in parallel. However, most niching methods have difficulties that need to be overcome [22], such as reliance on prior knowledge of some niching parameters, difficulty in maintaining found solutions in a run, higher computational complexity, etc. Inspired from the aforesaid observations in DE, we employ a multi-mutation strategy that utilizes two different mutation strategies instead of utilizing niching technique. One mutation strategy is DE/rand/1 which has a high diversity to avoid premature convergence. The other mutation strategy is developed based on DE/current-to-rand/1 and fitness Euclidean-distance ratio [21] which encourages the survival of fitter and closer individuals, denoted as DE_FER. The mutation strategy DE_FER can be calculated as follows:
The index (fer) corresponding to the maximum value of FER is defined by
The multi-mutation strategy is described in Algorithm 2. NP is the population size.
Algorithm 2: Multi-mutation strategy
1: for each individual xi (1≤ i ≤ NP)
2: if rand < δ
3: Apply DE/rand/1 to generate the offspring
4: else
5: Apply DE_FER to generate the offspring
6: end if
7: end for
Multi-mutation strategy is able to keep a balance between the exploration and exploitation, which make it suitable for multimodal problem. DE/rand/1 uses the rand vector selected from the population to generate donor vectors. The scheme promotes exploration since all the vectors/individuals are attracted toward different position in the search space through iterations, thereby ensuring the population diversity. DE_FER uses the local best vector, i.e., a fittest-and-closest neighborhood individual. The local best vector can guide other vectors/individuals to exploit, so as to enhance local search ability.
C. Bi-population Evolution Strategy
Diversity and convergence are two targets that need to be achieved for dealing with MMOPs efficiently. As evolution progresses, the individuals with higher fitness tend to attract other inferior individuals, thereby inducing hill climbing behavior [34]. On the one hand, this behavior leads to loss of some peaks because of selection pressure and genetic drifts. On the other hand, as the research in [19] pointed out, historical data is another source that can be used to improve the algorithm performance. Hence, we are interested in a set of recently explored inferior individuals which may be used as a promising direction toward the optimum.
Motivated by this observation, instead of employing a single population in conventional DE, we use bi-population to achieve a good balance between locating different peaks by exploring and improving the solution precision by exploiting. Here, we denote FP as the evolution population to save the individuals who win in the competition and denote SP as the inferior population to save the individuals who fail in the competition. First, SP is initiated to be empty. For each offspring ui, we calculate the Euclidean distance of ui to the individuals in the current population. Then, the minimum Euclidean distance is calculated as follows:
Compare the fitness of the offspring ui and the individual x
Algorithm 3: Bi-population Evolution Strategy
1: for each offspring ui (1≤ i ≤ NP)
2: Find the individual
3: if f(ui) > f(x
4: if dist
5: SP = SP ∪ x
6: end if
7: x
8: end if
9: end for
10: if | SP | > k×NP, Remove the worst individuals so that | SP | = k×NP
Bi-population evolution strategy employs two populations to perform multimodal optimization in parallel. One the one hand, the difference between inferior individuals and the current individuals can be considered as a promising direction toward the optimum. Therefore, inferior population can be employed to improve the population diversity and explore more peaks. On the other hand, evolution population that consists of superior individuals have good fitness, which can exploit the region around the superior individuals to accelerate the convergence speed.
D. Update Strategy
During the evolution process, the individuals are attracted toward the superior individuals. After several generations of evolution, many individuals may have high similarity because of selection pressure. These individuals may explore the same peak. Obviously, this is a waste of resources. In addition, if the number of individuals surrounded a peak is too small, this behavior may lead to loss of the peak. As a result, it is difficult for the algorithm to find as many distinct global peaks as possible. Therefore, the proposed algorithm eliminates the individuals which have high similarity and generates new individuals to enhance the population diversity.
The location (U) of updated individual is calculated as follows:
The setting of σ is the same as that of σ in Algorithm 4.
For all updated individuals (u∈U), the mutation strategy can be calculated as follows:
The pseudocode of the population updating is shown in Algorithm 4.
Algorithm 4 Update the population
1: for each individual xi (1≤ i ≤ NP)
2: Locate the individual to be updated according to Eq. (17)
3: for each updated individual xu (u∈U)
4: if f(xu) < f(xi)
5: Perform mutation on xu according to Eq. (18)
6: endif
7: endfor
8: endfor
9: Output: population x
E. Complexity Analysis
The computational cost of BMDE mainly comes from the multi-mutation strategy, bi-population evolution strategy, and update strategy. For multi-mutation strategy, a loop over NP (population size) is conducted, containing a loop over D (dimension). The mutation and crossover operations are performed at the component level for each individual. Then, the runtime complexity is
Therefore, the time complexity of the proposed algorithm is
5. COMPARATIVE STUDIES OF EXPERIMENTS
A. Benchmark Functions
In this section, 20 widely used benchmark functions from CEC2013 [20] test suite are employed to verify the effectiveness of the proposed algorithm against other state-of-the-art algorithms. These functions can be divided into two groups. This first group includes F1–F10 which are simple and low-dimensional multimodal problems. F1–F5 have a small number of global optima, and F6–F10 have a large number of global optima. The second group includes F11–F20 which are composition multimodal problems composed of several basic problems with different characteristics. These benchmark functions show some characteristics like uneven landscape, multiple global optima and local optima, unequal spacing among optima, etc. The properties of these functions are given in Table 1. The meaning of each column is as follows. r denotes the niche radius. D denotes the dimension of the test function. The fourth column denotes the number of global optimal solutions for each test function. In order to ensure a fair comparison between the compared algorithms, the algorithm will terminate when the number of function evaluations reaches the specified threshold. MaxFES denotes the values of the maximum number of function evaluations (MaxFES) for each compared algorithm. The last column represents the population size for each function to be optimized.
| Fun. | r | D | Number of Global Optima | MaxFES | Population Size |
|---|---|---|---|---|---|
| F1 | 0.01 | 1 | 2 | 5E+04 | 80 |
| F2 | 0.01 | 1 | 5 | 5E+04 | 80 |
| F3 | 0.01 | 1 | 1 | 5E+04 | 80 |
| F4 | 0.01 | 2 | 4 | 5E+04 | 80 |
| F5 | 0.5 | 2 | 2 | 5E+04 | 80 |
| F6 | 0.5 | 2 | 18 | 2E+05 | 100 |
| F7 | 0.2 | 2 | 36 | 2E+05 | 300 |
| F8 | 0.5 | 3 | 81 | 4E+05 | 300 |
| F9 | 0.2 | 3 | 216 | 4E+05 | 300 |
| F10 | 0.01 | 2 | 12 | 2E+05 | 100 |
| F11 | 0.01 | 2 | 6 | 2E+05 | 200 |
| F12 | 0.01 | 2 | 8 | 2E+05 | 200 |
| F13 | 0.01 | 2 | 6 | 2E+05 | 200 |
| F14 | 0.01 | 3 | 6 | 4E+05 | 200 |
| F15 | 0.01 | 3 | 8 | 4E+05 | 200 |
| F16 | 0.01 | 5 | 6 | 4E+05 | 200 |
| F17 | 0.01 | 5 | 8 | 4E+05 | 200 |
| F18 | 0.01 | 10 | 6 | 4E+05 | 400 |
| F19 | 0.01 | 10 | 8 | 4E+05 | 200 |
| F20 | 0.01 | 20 | 8 | 4E+05 | 400 |
MaxFES, maximum number of function evaluations.
Parameter setting for test functions.
Some functions from the CEC2013 are drawn in the following. Five-Uneven-Peak Trap (F1) has 2 global optima and 3 local optima, as shown in Figure 1 (a). Six-Hump Camel Back function (F5) has 2 global optima and 2 local optima, as shown in Figure 1(b). Figure 1(c) shows an example of the Shubert 2D function (F6), where there are 18 global optima in 9 pairs. Figure 1 (d) shows the 2D version of CF2 (F12). Composition Function 2 (CF2) is constructed based on eight basic functions, therefore it has eight global optima. The basic functions used in CF2 include Rastrigin’s function, Weierstrass function, Griewank’s function, and Shpere function.
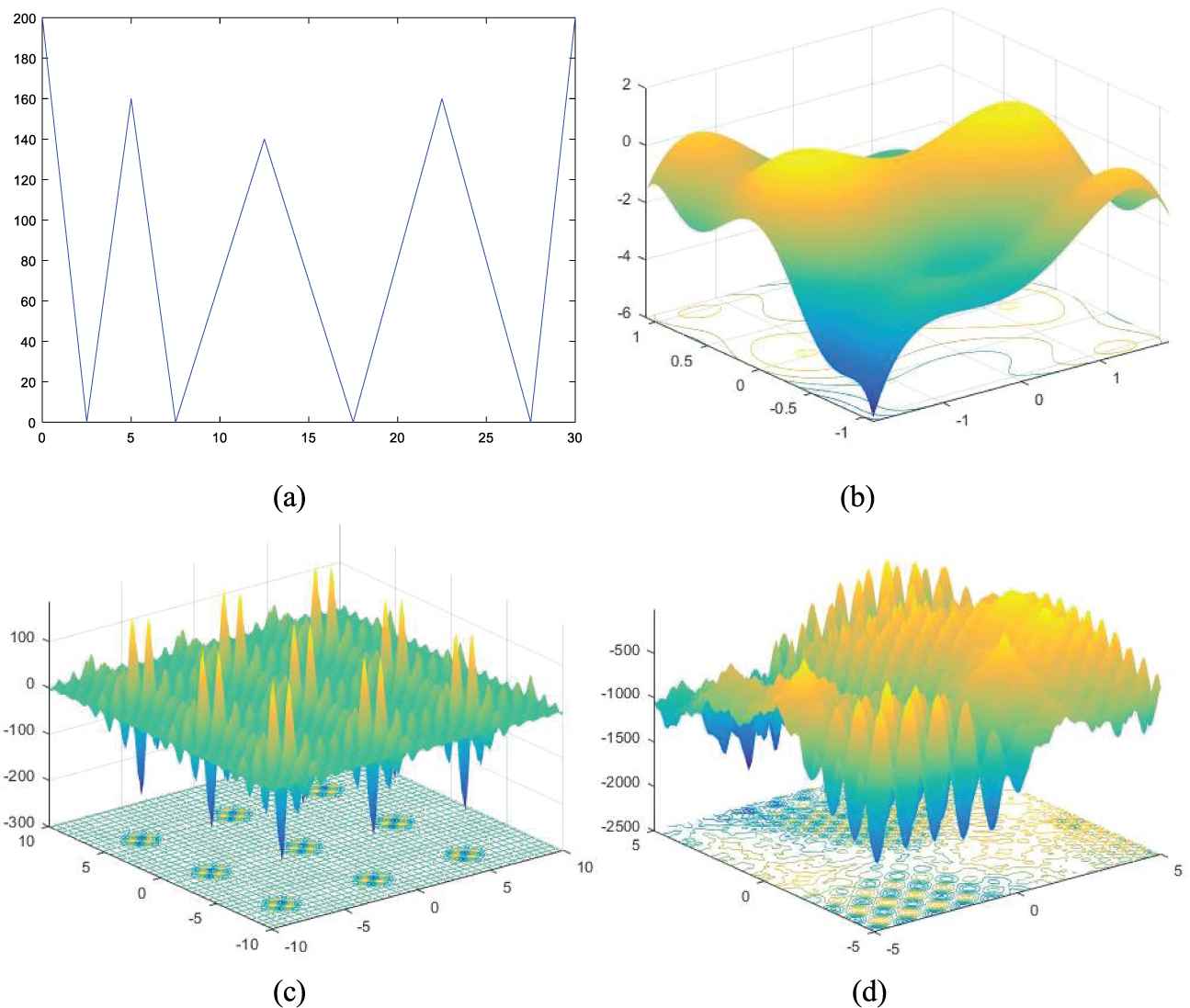
Four functions from the Congress on Evolutionary Computation 2013.
B. Algorithms Compared
In this paper, 13 algorithms are selected to compare with the proposed algorithm. These algorithms can be divided into four categories. CDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NCDE, SCMA-ES, and MA-ESN belong to the category of niching without niching parameters. SDE and NSDE belong to the category of speciation. NShDE belongs to the category of fitness sharing. MOMMOP belongs to the category of using multiobjective optimization method for MMOPs. The state-of-the-art multimodal algorithms used for comparison with BMDE are shown as follows.
CDE [11]: Crowding DE.
SDE [2]: Species DE.
FERPSO [21]: fitness-Euclidean-distance ration PSO.
r2PSO [22]: lbest PSO that interacts to its immediate right member by using a ring topology.
r3PSO [22]: lbest PSO that interacts to its immediate left and right member by using a ring topology.
r2PSO-lhc [22]: r2PSO model without overlapping neighborhoods.
r3PSO-lhc [22]: r3PSO model without overlapping neighborhoods.
NSDE [2]: neighborhood based SDE.
NShDE [2]: neighborhood based sharing DE.
NCDE [2]: neighborhood based CDE.
MOMMOP [13]: multiobjective optimization for MMOPs
SCMA-ES [23]: self-adaptive niching CMA-ES
MA-ESN [24–25]: matrix adaptation evolution strategy with dynamic niching
BMDE: the proposed algorithm.
C. Experimental Platform and Parameter Setting
To obtain an unbiased comparison, all the experiments are carried out on the same machine with an Intel Core i7-3770 3.40 GHz CPU and 4 GB memory.
All the algorithms use the same termination criterion, i.e., the MaxFES. The settings of MaxFES for the test functions are shown in Table 1. Each algorithm is run 25 times for each test function. The population size of BMDE is described in Table 1. The population size of other algorithms agree well with the original papers. Other parameter settings of each algorithm are provided in Table 2.
| Algorithm | Parameter Setting |
|---|---|
| CDE | Scaling factor F = 0.9, the probability of crossover CR = 0.1 |
| SDE | Scaling factor F = 0.9, the probability of crossover CR = 0.1 |
| FERPSO | Acceleration coefficient c1 = c2 = 2.05, inertia weight w = 0.7298 |
| r2PSO | Acceleration coefficient c1 = c2 = 2.05, inertia weight w = 0.7298 |
| r3PSO | Acceleration coefficient c1 = c2 = 2.05, inertia weight w = 0.7298 |
| r2PSO-lhc | Acceleration coefficient c1 = c2 = 2.05, inertia weight w = 0.7298 |
| r3PSO-lhc | Acceleration coefficient c1 = c2 = 2.05, inertia weight w = 0.7298 |
| NSDE | Scaling factor F = 0.9, the probability of crossover CR = 0.1 |
| NShDE | F = 0.9, CR = 0.1, archive size Msize = 2*NP (NP is the population size) |
| NCDE | Scaling factor F = 0.9, the probability of crossover CR = 0.1 |
| MOMMOP | Scaling factor F = 0.5, the probability of crossover CR = 0.7 |
| SCMA-ES | Candidate solutions λ = 10, μeff = 1, step-size of the mutation σ0 = 0.25 |
| MA-ESN | Candidate solutions λ = 10, μeff = 1, step-size of the mutation σ0 = 0.25 |
| BMDE | F = 0.8, CR = 0.5, archive size Msize = 1.5*NP (NP is the population size), σ = 0.01 |
BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Parameter setting of the algorithms.
Generally, there are five accuracy thresholds, ε = 1.0E–1, ε = 1.0E–2, ε = 1.0E–3, ε = 1.0E–4, and ε = 1.0E–5. ε = 1.0E–1 and ε = 1.0E–2 are easily available. Therefore, the accuracy thresholds with ε = 1.0E–3, ε = 1.0E–4, and ε = 1.0E–5 are selected in the experiments. In addition, two well-known criteria [11] called peak ratio (PR) and success rate (SR) are employed to measure the performance of different multimodal optimization algorithms for each function. PR denotes the average percentage of all known global optima found over all runs, while SR denotes the percentage of successfully detecting all global optima out of all runs for each function.
In view of statistics significance of the results, the Wilcoxon signed-rank test [35] at the 5% significance level is employed to compare BMDE with other compared algorithms. “≈,” “−,” and “+” are applied to express the performance of BMDE is similar to (≈), worse than (−), and better than (+) that of the compared algorithm, respectively. Moreover, the Friedman’s test, which is implemented by using KEEL software [36], is used to determine the ranking of all compared algorithms.
D. Comparisons with State-of-the-Art Multimodal Algorithms
Tables 3–5 show the result obtained by BMDE, CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on F1−F10 with respect to PR and SR at three accuracy levels, i.e., ε = 1.0E−3, ε = 1.0E−4, and ε = 1.0E−5. For the functions F1−F10, as can be seen from Tables 3–5, BMDE can find all global solutions in a single run at three accuracy levels.
| Func | BMDE |
CDE |
SDE |
FERPSO |
r2PSO |
r3PSO |
r2PSO-lhc |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F1 | 1 | 1.000 | 1(≈) | 1.000 | 0.78(+) | 0.560 | 0(+) | 0.000 | 0(+) | 0.000 | 0(+) | 0.000 | 0(+) | 0.000 |
| F2 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.99(≈) | 0.960 | 1(≈) | 1.000 |
| F3 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F4 | 1 | 1.000 | 0.75(+) | 0.280 | 0.25(+) | 0.000 | 1(≈) | 1.000 | 0.97(≈) | 0.880 | 0.96(+) | 0.840 | 0.99(≈) | 0.960 |
| F5 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F6 | 1 | 1.000 | 0.95(+) | 0.440 | 0.85(+) | 0.080 | 0.88(+) | 0.160 | 0.53(+) | 0.000 | 0.63(+) | 0.000 | 0.63(+) | 0.000 |
| F7 | 1 | 1.000 | 0.93(+) | 0.040 | 0.61(+) | 0.000 | 0.41(+) | 0.000 | 0.53(+) | 0.000 | 0.50(+) | 0.000 | 0.55(+) | 0.000 |
| F8 | 1 | 1.000 | 0.49(+) | 0.000 | 0.16(+) | 0.000 | 0.02(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F9 | 1 | 1.000 | 0.70(+) | 0.000 | 0.23(+) | 0.000 | 0.20(+) | 0.000 | 0.17(+) | 0.000 | 0.19(+) | 0.000 | 0.19(+) | 0.000 |
| F10 | 1 | 1.000 | 1(≈) | 1.000 | 0.43(+) | 0.000 | 0.34(+) | 0.000 | 0.89(+) | 0.280 | 0.91(+) | 0.400 | 0.93(+) | 0.400 |
| +(BMDE is better) | 5 | 7 | 6 | 6 | 7 | 6 | ||||||||
| − (BMDE is worse) | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||
| ≈(BMDE is similar) | 5 | 3 | 4 | 4 | 3 | 4 | ||||||||
| Func | r3PSO-lhc |
NSDE |
NShDE |
NCDE |
MOMMOP |
SCMA-ES |
MA-ESN |
|||||||
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F1 | 0(+) | 0.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F2 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.92(+) | 0.720 | 0.88(+) | 0.480 |
| F3 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.84(+) | 0.840 | 0.72(+) | 0.720 |
| F4 | 1(≈) | 1.000 | 0.96(≈) | 0.880 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.66(+) | 0.040 | 0.64(+) | 0.120 |
| F5 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.84(+) | 0.720 | 0.84(+) | 0.720 |
| F6 | 0.67(+) | 0.000 | 0.01(+) | 0.000 | 0.99(+) | 0.840 | 0.99(≈) | 0.960 | 1(≈) | 1.000 | 0.75(+) | 0.000 | 0.76(+) | 0.000 |
| F7 | 0.53(+) | 0.000 | 0.64(+) | 0.000 | 0.98(+) | 0.640 | 0.94(+) | 0.000 | 1(≈) | 1.000 | 0.79(+) | 0.000 | 0.81(+) | 0.000 |
| F8 | 0.00(+) | 0.000 | 0.00 (+) | 0.000 | 0.89(+) | 0.000 | 0.99(≈) | 0.960 | 1(≈) | 1.000 | 0.53(+) | 0.000 | 0.52(+) | 0.000 |
| F9 | 0.19(+) | 0.000 | 0.26(+) | 0.000 | 0.79(+) | 0.000 | 0.66(+) | 0.000 | 1(≈) | 1.000 | 0.14(+) | 0.000 | 0.14(+) | 0.000 |
| F10 | 0.93(+) | 0.360 | 0.98(+) | 0.800 | 0.94(+) | 0.360 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.84(+) | 0.080 | 0.85(+) | 0.080 |
| + | 6 | 5 | 5 | 2 | 0 | 9 | 9 | |||||||
| − | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||
| ≈ | 4 | 5 | 5 | 8 | 10 | 1 | 1 | |||||||
BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching; PR, peak ratio; SR, success rate.
Experimental results in PR and SR on problems F1−F10 at accuracy level ε = 1.0E−3.
| Func | BMDE |
CDE |
SDE |
FERPSO |
r2PSO |
r3PSO |
r2PSO-lhc |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F1 | 1 | 1.000 | 1(≈) | 1.000 | 0.78(+) | 0.560 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F2 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.99(≈) | 0.960 | 1(≈) | 1.000 |
| F3 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F4 | 1 | 1.000 | 0.22(+) | 0.040 | 0.25(+) | 0.000 | 1(≈) | 1.000 | 0.89(+) | 0.600 | 0.92(+) | 0.680 | 0.94(+) | 0.800 |
| F5 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F6 | 1 | 1.000 | 0.49(+) | 0.000 | 0.83(+) | 0.04 | 0.85(+) | 0.04 | 0.35(+) | 0.000 | 0.48(+) | 0.000 | 0.50(+) | 0.000 |
| F7 | 1 | 1.000 | 0.92(+) | 0.000 | 0.61(+) | 0.000 | 0.41(+) | 0.000 | 0.49(+) | 0.000 | 0.47(+) | 0.000 | 0.51(+) | 0.000 |
| F8 | 1 | 1.000 | 0.05(+) | 0.000 | 0.16(+) | 0.000 | 0.01(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F9 | 1 | 1.000 | 0.69(+) | 0.000 | 0.23(+) | 0.000 | 0.18(+) | 0.000 | 0.08(+) | 0.000 | 0.09(+) | 0.000 | 0.09(+) | 0.000 |
| F10 | 1 | 1.000 | 1(≈) | 1.000 | 0.43(+) | 0.000 | 0.33(+) | 0.000 | 0.80(+) | 0.080 | 0.85(+) | 0.240 | 0.84(+) | 0.080 |
| +(BMDE is better) | 5 | 7 | 6 | 7 | 7 | 7 | ||||||||
| − (BMDE is worse) | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||
| ≈(BMDE is similar) | 5 | 3 | 4 | 3 | 3 | 3 | ||||||||
| Func | r3PSO-lhc |
NSDE |
NShDE |
NCDE |
MOMMOP |
SCMA-ES |
MA-ESN |
|||||||
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F1 | 0.00(+) | 0.00 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F2 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.80(+) | 0.320 | 0.66(+) | 0.040 |
| F3 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.80(+) | 0.800 | 0.56(+) | 0.560 |
| F4 | 0.98(≈) | 0.920 | 0.91(+) | 0.680 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.99(≈) | 0.960 | 0.63(+) | 0.000 | 0.64(+) | 0.120 |
| F5 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.78(+) | 0.640 | 0.80(+) | 0.680 |
| F6 | 0.52(+) | 0.000 | 0.00(+) | 0.000 | 0.79(+) | 0.040 | 0.98(+) | 0.760 | 1(≈) | 1.000 | 0.75(+) | 0.000 | 0.76(+) | 0.000 |
| F7 | 0.50(+) | 0.000 | 0.49(+) | 0.000 | 0.98(+) | 0.640 | 0.94(+) | 0.000 | 1(≈) | 1.000 | 0.79(+) | 0.000 | 0.80(+) | 0.000 |
| F8 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.62(+) | 0.000 | 0.98(≈) | 0.920 | 1(≈) | 1.000 | 0.53(+) | 0.000 | 0.52(+) | 0.000 |
| F9 | 0.09(+) | 0.000 | 0.13(+) | 0.000 | 0.78(+) | 0.000 | 0.66(+) | 0.000 | 0.99(≈) | 0.920 | 0.14(+) | 0.000 | 0.14(+) | 0.000 |
| F10 | 0.88(+) | 0.240 | 0.89(+) | 0.280 | 0.94(+) | 0.360 | 0.99(≈) | 0.960 | 1(≈) | 1.000 | 0.84(+) | 0.080 | 0.85(+) | 0.080 |
| + | 6 | 6 | 5 | 3 | 0 | 9 | 9 | |||||||
| − | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||
| ≈ | 4 | 4 | 5 | 7 | 10 | 1 | 1 | |||||||
Experimental results in PR and SR on problems F1−F10 at accuracy level ε = 1.0E−4.
| Func | BMDE |
CDE |
SDE |
FERPSO |
r2PSO |
r3PSO |
r2PSO-lhc |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F1 | 1 | 1.000 | 1(≈) | 1.000 | 0.78(+) | 0.560 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F2 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.99(≈) | 0.960 | 1(≈) | 1.000 |
| F3 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F4 | 1 | 1.000 | 0.02(+) | 0.000 | 0.25(+) | 0.000 | 0.99(≈) | 0.960 | 0.70(+) | 0.240 | 0.78(+) | 0.360 | 0.86(+) | 0.560 |
| F5 | 1 | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F6 | 1 | 1.000 | 0.10(+) | 0.000 | 0.82(+) | 0.04 | 0.79(+) | 0.000 | 0.21(+) | 0.000 | 0.37(+) | 0.000 | 0.46(+) | 0.000 |
| F7 | 1 | 1.000 | 0.80(+) | 0.000 | 0.61(+) | 0.000 | 0.39(+) | 0.000 | 0.43(+) | 0.000 | 0.44(+) | 0.000 | 0.00 (+) | 0.000 |
| F8 | 1 | 1.000 | 0.00(+) | 0.000 | 0.16(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F9 | 1 | 1.000 | 0.58(+) | 0.000 | 0.23(+) | 0.000 | 0.14(+) | 0.000 | 0.03(+) | 0.000 | 0.03(+) | 0.000 | 0.03(+) | 0.000 |
| F10 | 1 | 1.000 | 1(≈) | 1.000 | 0.43(+) | 0.000 | 0.32(+) | 0.000 | 0.65(+) | 0.000 | 0.76(+) | 0.120 | 0.74(+) | 0.000 |
| +(BMDE is better) | 5 | 7 | 6 | 7 | 7 | 7 | ||||||||
| − (BMDE is worse) | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||
| ≈(BMDE is similar) | 5 | 3 | 4 | 3 | 3 | 3 | ||||||||
| Func | r3PSO-lhc |
NSDE |
NShDE |
NCDE |
MOMMOP |
SCMA-ES |
MA-ESN |
|||||||
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F1 | 0.00(+) | 0.00 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 |
| F2 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.65(+) | 0.160 | 0.44(+) | 0.000 |
| F3 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.72(+) | 0.720 | 0.32(+) | 0.320 |
| F4 | 0.85(+) | 0.520 | 0.87(+) | 0.560 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.97(≈) | 0.880 | 0.62(+) | 0.000 | 0.60(+) | 0.080 |
| F5 | 0.98(≈) | 0.960 | 0.98(≈) | 0.960 | 1(≈) | 1.000 | 1(≈) | 1.000 | 1(≈) | 1.000 | 0.74(+) | 0.600 | 0.78(+) | 0.640 |
| F6 | 0.41(+) | 0.000 | 0.00(+) | 0.000 | 0.33(+) | 0.000 | 0.91(+) | 0.200 | 1(≈) | 1.000 | 0.75(+) | 0.000 | 0.76(+) | 0.000 |
| F7 | 0.46(+) | 0.000 | 0.35(+) | 0.000 | 0.98(+) | 0.560 | 0.94(+) | 0.000 | 1(≈) | 1.000 | 0.79(+) | 0.000 | 0.80(+) | 0.000 |
| F8 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.28(+) | 0.000 | 0.98(+) | 0.480 | 1(≈) | 1.000 | 0.53(+) | 0.000 | 0.52(+) | 0.000 |
| F9 | 0.03(+) | 0.000 | 0.07(+) | 0.000 | 0.77(+) | 0.000 | 0.65(+) | 0.000 | 0.98(+) | 0.000 | 0.14(+) | 0.000 | 0.14(+) | 0.000 |
| F10 | 0.80(+) | 0.040 | 0.75(+) | 0.040 | 0.94(+) | 0.360 | 0.99(≈) | 0.960 | 1(≈) | 1.000 | 0.84(+) | 0.080 | 0.85(+) | 0.080 |
| + | 7 | 6 | 5 | 4 | 1 | 9 | 9 | |||||||
| − | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||
| ≈ | 3 | 4 | 5 | 6 | 9 | 1 | 1 | |||||||
Experimental results in PR and SR on problems F1−F10 at accuracy level ε = 1.0E−5.
Table 3 shows that BMDE performs better than SDE, r2PSO, r2PSO-lhc on F1, F4, F6, F7, F8, F9 and F10. BMDE performs better than CDE on F4, F6, F7, F8, and F9. BMDE performs better than FERPSO and r3PSO-lhc on F1, F6, F7, F8, F9, and F10. BMDE performs better than r3PSO on all problems except F3 and F5. BMDE performs better than NSDE on F4, F6, F7, F8, F9, and F10. BMDE performs better than NShDE on F6, F7, F8, F9, and F10. BMDE performs better than NCDE on F6, F7, F8, and F9. BMDE performs better than SCMA-ES and MA-ESN on all problems except F1. MOMMOP can find all global solutions in a single run at ε = 1.0E−3. BMDE outperforms CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on 5, 7, 6, 6, 7, 6, 6, 5, 5, 2, 0, 9, 9 test problems, respectively.
Table 4 indicates that BMDE performs better than SDE, r2PSO, r2PSO-lhc, r3PSO-lhc on F1, F4, F6, F7, F8, F9, and F10. BMDE performs better than CDE on F4, F6, F7, F8, and F9. BMDE performs better than FERPSO on F1, F6, F7, F8, F9, and F10. BMDE performs better than r3PSO on all problems except F3 and F5. BMDE performs better than NSDE on F4, F6, F7, F8, F9, and F10. BMDE performs better than NShDE and NCDE on F6, F7, F8, F9, and F10. BMDE performs better than MOMMOP on F4 and F9. BMDE performs better than SCMA-ES and MA-ESN on all problems except F1. BMDE outperforms CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on 5, 7, 6, 7, 7, 7, 6, 6, 5, 3, 0, 9, 9 test problems, respectively.
Table 5 indicates that BMDE performs better than SDE, FERPSO, r2PSO, r2PSO-lhc, on F1, F4, F6, F7, F8, F9, and F10. BMDE performs better than CDE on F4, F6, F7, F8, and F9. BMDE performs better than r3PSO on all problems except F3 and F5. BMDE performs better than r3PSO-lhc on all problems except F2 and F3. BMDE performs better than NSDE on F4, F5, F6, F7, F8, F9, and F10. BMDE performs better than NShDE and NCDE on F6, F7, F8, F9, and F10. BMDE performs better than MOMMOP on F4 and F9. BMDE performs better than SCMA-ES and MA-ESN on all problems except F1. BMDE outperforms CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on 5, 7, 6, 7, 7, 7, 7, 6, 5, 4, 1, 9, 9 test problems, respectively.
Tables 6–8 shows the result obtained by BMDE, CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on F11−F20 with respect to PR and SR at ε = 1.0E−3, ε = 1.0E−4, and ε = 1.0E−5, respectively. As can be seen in Tables 6–8, BMDE performs better than CDE, SDE, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, and NSDE on all problems at ε = 1.0E−3, ε = 1.0E−4, and ε = 1.0E−5, respectively. BMDE performs better than FERPSO on all problems except F12 at three accuracy levels. BMDE performs better than NShDE on F11, F12, F13, F15, F16, F18, and F19at ε = 1.0E−5. BMDE performs better than NCDE on all problems except F20 at ε = 1.0E−4 and ε = 1.0E−5, respectively. BMDE performs better than MOMMOP on F11, F13, and F16 at ε = 1.0E−4 and ε = 1.0E−5, respectively. BMDE performs better than SCMA-ES and MA-ESN on all problems except F19 at three accuracy levels.
| Func | BMDE |
CDE |
SDE |
FERPSO |
r2PSO |
r3PSO |
r2PSO-lhc |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F11 | 0.90 | 0.400 | 0.16(+) | 0.000 | 0.18(+) | 0.000 | 0.66(+) | 0.000 | 0.64(+) | 0.000 | 0.66(+) | 0.000 | 0.65(+) | 0.000 |
| F12 | 0.62 | 0.000 | 0.01(+) | 0.000 | 0.15(+) | 0.000 | 0.67(−) | 0.000 | 0.36(+) | 0.000 | 0.38(+) | 0.000 | 0.42(+) | 0.000 |
| F13 | 0.68 | 0.000 | 0.12(+) | 0.000 | 0.18(+) | 0.000 | 0.66(≈) | 0.000 | 0.64(+) | 0.000 | 0.62(+) | 0.000 | 0.66(+) | 0.000 |
| F14 | 0.66 | 0.000 | 0.03(+) | 0.000 | 0.14(+) | 0.000 | 0.40(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.02(+) | 0.000 |
| F15 | 0.43 | 0.000 | 0.04(+) | 0.000 | 0.03(+) | 0.000 | 0.23(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F16 | 0.66 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.62(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F17 | 0.25 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.05(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F18 | 0.49 | 0.000 | 0.03(+) | 0.000 | 0.00(+) | 0.000 | 0.14(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F19 | 0.12 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F20 | 0.12 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| +(BMDE is better) | 10 | 10 | 8 | 10 | 10 | 10 | ||||||||
| − (BMDE is worse) | 0 | 0 | 1 | 0 | 0 | 0 | ||||||||
| ≈(BMDE is similar) | 0 | 0 | 1 | 0 | 0 | 0 | ||||||||
| Func | r3PSO-lhc |
NSDE |
NShDE |
NCDE |
MOMMOP |
SCMA-ES |
MA-ESN |
|||||||
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F11 | 0.64(+) | 0.000 | 0.66(+) | 0.000 | 0.66(+) | 0.000 | 0.70(+) | 0.000 | 0.98(−) | 0.880 | 0.58(+) | 0.000 | 0.59(+) | 0.000 |
| F12 | 0.38(+) | 0.000 | 0.03(+) | 0.000 | 0.44(+) | 0.000 | 0.33(+) | 0.000 | 0.95(−) | 0.600 | 0.35(+) | 0.000 | 0.55(+) | 0.000 |
| F13 | 0.64(+) | 0.000 | 0.49(+) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.58(+) | 0.000 | 0.60(+) | 0.000 |
| F14 | 0.02(+) | 0.000 | 0.25(+) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.24(+) | 0.000 | 0.32(+) | 0.000 |
| F15 | 0.00(+) | 0.000 | 0.16(+) | 0.000 | 0.36(+) | 0.000 | 0.35(+) | 0.000 | 0.63(−) | 0.000 | 0.16(+) | 0.000 | 0.16(+) | 0.000 |
| F16 | 0.00(+) | 0.000 | 0.02(+) | 0.000 | 0.66(≈) | 0.000 | 0.64(≈) | 0.000 | 0.62(+) | 0.000 | 0.20(+) | 0.000 | 0.18(+) | 0.000 |
| F17 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.27(≈) | 0.000 | 0.24(≈) | 0.000 | 0.54(−) | 0.000 | 0.13(+) | 0.000 | 0.12(+) | 0.000 |
| F18 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.28(+) | 0.000 | 0.30(+) | 0.000 | 0.50(≈) | 0.000 | 0.16(+) | 0.000 | 0.16(+) | 0.000 |
| F19 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.18(−) | 0.000 | 0.16(−) | 0.000 | 0.22(−) | 0.000 | 0.12(≈) | 0.000 | 0.12(≈) | 0.000 |
| F20 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.25(−) | 0.000 | 0.25(−) | 0.000 | 0.12(≈) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| + | 10 | 10 | 4 | 4 | 1 | 9 | 9 | |||||||
| − | 0 | 0 | 2 | 2 | 5 | 0 | 0 | |||||||
| ≈ | 0 | 0 | 4 | 4 | 4 | 1 | 1 | |||||||
Experimental results in PR and SR on problems F11−F20 at accuracy level ε = 1.0E−3.
| Func | BMDE |
CDE |
SDE |
FERPSO |
r2PSO |
r3PSO |
r2PSO-lhc |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F11 | 0.88 | 0.320 | 0.02(+) | 0.000 | 0.18(+) | 0.000 | 0.66(+) | 0.000 | 0.57(+) | 0.000 | 0.64(+) | 0.000 | 0.61(+) | 0.000 |
| F12 | 0.52 | 0.000 | 0.00(+) | 0.000 | 0.18(+) | 0.000 | 0.60(−) | 0.000 | 0.29(+) | 0.000 | 0.33(+) | 0.000 | 0.36(+) | 0.000 |
| F13 | 0.68 | 0.000 | 0.02(+) | 0.000 | 0.15(+) | 0.000 | 0.60(≈) | 0.000 | 0.59(+) | 0.000 | 0.60(+) | 0.000 | 0.60(+) | 0.000 |
| F14 | 0.66 | 0.000 | 0.00(+) | 0.000 | 0.18(+) | 0.000 | 0.39(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.01(+) | 0.000 |
| F15 | 0.40 | 0.000 | 0.00(+) | 0.000 | 0.14(+) | 0.000 | 0.23(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F16 | 0.66 | 0.000 | 0.00(+) | 0.000 | 0.03(+) | 0.000 | 0.60(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F17 | 0.25 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.05(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F18 | 0.42 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.13(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F19 | 0.12 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F20 | 0.12 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| +(BMDE is better) | 10 | 10 | 8 | 10 | 10 | 10 | ||||||||
| − (BMDE is worse) | 0 | 0 | 1 | 0 | 0 | 0 | ||||||||
| ≈(BMDE is similar) | 0 | 0 | 1 | 0 | 0 | 0 | ||||||||
| Func | r3PSO-lhc |
NSDE |
NShDE |
NCDE |
MOMMOP |
SCMA-ES |
MA-ESN |
|||||||
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F11 | 0.64(+) | 0.000 | 0.66(+) | 0.000 | 0.66(+) | 0.000 | 0.68(+) | 0.000 | 0.70(+) | 0.000 | 0.58(+) | 0.000 | 0.58(+) | 0.000 |
| F12 | 0.32(+) | 0.000 | 0.03(+) | 0.000 | 0.38(+) | 0.000 | 0.21(+) | 0.000 | 0.92(−) | 0.440 | 0.34(+) | 0.000 | 0.41(+) | 0.000 |
| F13 | 0.60(+) | 0.000 | 0.46(+) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.58(+) | 0.000 | 0.60(+) | 0.000 |
| F14 | 0.00(+) | 0.000 | 0.16(+) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.24(+) | 0.000 | 0.32(+) | 0.000 |
| F15 | 0.00(+) | 0.000 | 0.14(+) | 0.000 | 0.36(+) | 0.000 | 0.35(+) | 0.000 | 0.59(−) | 0.000 | 0.16(+) | 0.000 | 0.16(+) | 0.000 |
| F16 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.66(≈) | 0.000 | 0.63(+) | 0.000 | 0.62(+) | 0.000 | 0.20(+) | 0.000 | 0.18(+) | 0.000 |
| F17 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.26(≈) | 0.000 | 0.23(+) | 0.000 | 0.52(−) | 0.000 | 0.13(+) | 0.000 | 0.12(+) | 0.000 |
| F18 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.24(+) | 0.000 | 0.26(+) | 0.000 | 0.50(−) | 0.000 | 0.16(+) | 0.000 | 0.16(+) | 0.000 |
| F19 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.15(−) | 0.000 | 0.12(≈) | 0.000 | 0.22(−) | 0.000 | 0.12(≈) | 0.000 | 0.12(≈) | 0.000 |
| F20 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.24(−) | 0.000 | 0.25(−) | 0.000 | 0.12(≈) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| + | 10 | 10 | 4 | 6 | 2 | 9 | 9 | |||||||
| − | 0 | 0 | 2 | 1 | 5 | 0 | 0 | |||||||
| ≈ | 0 | 0 | 4 | 3 | 3 | 1 | 1 | |||||||
Experimental results in PR and SR on problems F11−F20 at accuracy level ε = 1.0E−4.
| Func | BMDE |
CDE |
SDE |
FERPSO |
r2PSO |
r3PSO |
r2PSO-lhc |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F11 | 0.86 | 0.240 | 0.00(+) | 0.000 | 0.18(+) | 0.000 | 0.66(+) | 0.000 | 0.45(+) | 0.000 | 0.58(+) | 0.000 | 0.56(+) | 0.000 |
| F12 | 0.44 | 0.000 | 0.00(+) | 0.000 | 0.15(+) | 0.000 | 0.64(−) | 0.000 | 0.25(+) | 0.000 | 0.29(+) | 0.000 | 0.26(+) | 0.000 |
| F13 | 0.68 | 0.000 | 0.00(+) | 0.000 | 0.18(+) | 0.000 | 0.65(≈) | 0.000 | 0.43(+) | 0.000 | 0.58(+) | 0.000 | 0.50(+) | 0.000 |
| F14 | 0.66 | 0.000 | 0.00(+) | 0.000 | 0.14(+) | 0.000 | 0.38(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F15 | 0.40 | 0.000 | 0.00(+) | 0.000 | 0.03(+) | 0.000 | 0.23(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F16 | 0.66 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.58(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F17 | 0.25 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.05(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F18 | 0.37 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.05(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F19 | 0.12 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| F20 | 0.12 | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.00(+) | 0.000 |
| +(BMDE is better) | 10 | 10 | 8 | 10 | 10 | 10 | ||||||||
| −(BMDE is worse) | 0 | 0 | 1 | 0 | 0 | 0 | ||||||||
| ≈(BMDE is similar) | 0 | 0 | 1 | 0 | 0 | 0 | ||||||||
| Func | r3PSO-lhc |
NSDE |
NShDE |
NCDE |
MOMMOP |
SCMA-ES |
MA-ESN |
|||||||
| PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | PR | SR | |
| F11 | 0.58(+) | 0.000 | 0.65(+) | 0.000 | 0.66(+) | 0.000 | 0.68(+) | 0.000 | 0.66(+) | 0.000 | 0.57(+) | 0.000 | 0.56(+) | 0.000 |
| F12 | 0.28(+) | 0.000 | 0.02(+) | 0.000 | 0.34(+) | 0.000 | 0.16(+) | 0.000 | 0.81(−) | 0.080 | 0.33(+) | 0.000 | 0.27(+) | 0.000 |
| F13 | 0.56(+) | 0.000 | 0.44(+) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.58(+) | 0.000 | 0.59(+) | 0.000 |
| F14 | 0.00(+) | 0.000 | 0.12(+) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.66(≈) | 0.000 | 0.24(+) | 0.000 | 0.32(+) | 0.000 |
| F15 | 0.00(+) | 0.000 | 0.08(+) | 0.000 | 0.36(+) | 0.000 | 0.35(+) | 0.000 | 0.59(−) | 0.000 | 0.16(+) | 0.000 | 0.16(+) | 0.000 |
| F16 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.66(≈) | 0.000 | 0.60(+) | 0.000 | 0.62(+) | 0.000 | 0.20(+) | 0.000 | 0.18(+) | 0.000 |
| F17 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.26(≈) | 0.000 | 0.22(+) | 0.000 | 0.47(−) | 0.000 | 0.13(+) | 0.000 | 0.12(+) | 0.000 |
| F18 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.20(+) | 0.000 | 0.26(+) | 0.000 | 0.50(−) | 0.000 | 0.16(+) | 0.000 | 0.16(+) | 0.000 |
| F19 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.12(≈) | 0.000 | 0.07(+) | 0.000 | 0.22(−) | 0.000 | 0.12(≈) | 0.000 | 0.12(≈) | 0.000 |
| F20 | 0.00(+) | 0.000 | 0.00(+) | 0.000 | 0.24(−) | 0.000 | 0.25(−) | 0.000 | 0.12(≈) | 0.000 | 0(+) | 0.000 | 0.00(+) | 0.000 |
| + | 10 | 10 | 4 | 7 | 2 | 9 | 9 | |||||||
| − | 0 | 0 | 1 | 1 | 5 | 0 | 0 | |||||||
| ≈ | 0 | 0 | 5 | 2 | 3 | 1 | 1 | |||||||
Experimental results in PR and SR on problems F11−F20 at accuracy level ε = 1.0E−5.
BMDE outperforms CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on 10, 10, 8, 10, 10, 10, 10, 10, 4, 4, 1, 9, 9 test problems at ε = 1.0E−3, respectively. BMDE outperforms CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on 10, 10, 8, 10, 10, 10, 10, 10, 4, 6, 2, 9, 9 test problems at ε = 1.0E−4, respectively. BMDE outperforms CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on 10, 10, 8, 10, 10, 10, 10, 10, 4, 7, 2, 9, 9 test problems at ε = 1.0E−5, respectively.
Tables 3–8 show that the number of “+ (better)” obtained by the proposed algorithm is bigger than most compared algorithms except MOMMOP. It was experimental shown that BMDE ranks first among all algorithms when accuracy level ε = 1.0E−5, while BMDE ranks second among all algorithms when accuracy level ε = 1.0E−3 and ε = 1.0E−4. Apart from MOMMOP, the average excellent and good rate of BMDE for 20 functions is 73.75%
In order to test the statistical significance of the 14 compared algorithms, the Wilcoxon’s test at the 5% significance level, which is implemented by using KEEL software [36], is employed based on the PR values. Tables 9–11 summarizes the statistical test results at three accuracy levels. It can be seen from Tables 9–11 that BMDE provides higher R+ values than R− values compared with CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, SCMA-ES, and MA-ESN at three accuracy levels. Furthermore, the p values of CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, SCMA-ES, and MA-ESN are less than 0.05 at ε = 1.0E−3, which means that BMDE is significantly better than these competitors. The p values of NShDE, NCDE, and MOMMOP are greater than 0.05, which means that the performance of BMDE is not different from that of NShDE, NCDE, and MOMMOP. Similarly, the p values of all compared algorithms are less than 0.05 at ε = 1.0E−4 except NShDE and MOMMOP. When ε = 1.0E−5, the p values of all compared algorithms are less than 0.05 except MOMMOP. Experimental results show that BMDE performs well on accuracy of solution.
| VS | R+ | R– | Exact P-Value | Asymptotic P-Value |
|---|---|---|---|---|
| CDE | 185.0 | 5.0 | ≥0.2 | 0.000234 |
| SDE | 188.5 | 1.5 | ≥0.2 | 0.000144 |
| FERPSO | 198.0 | 12.0 | ≥0.2 | 0.000375 |
| r2PSO | 188.5 | 1.5 | ≥0.2 | 0.000104 |
| r3PSO | 208.5 | 1.5 | ≥0.2 | 0.000076 |
| r2PSO-lhc | 188.5 | 1.5 | ≥0.2 | 0.000123 |
| r3PSO-lhc | 205.0 | 5.0 | ≥0.2 | 0.000152 |
| NSDE | 205.0 | 5.0 | ≥0.2 | 0.000164 |
| NShDE | 144.0 | 45.5 | ≥0.2 | 0.039016 |
| NCDE | 152.0 | 37.5 | ≥0.2 | 0.016654 |
| MOMMOP | 68.0 | 142.0 | ≥0.2 | 1 |
| SCMA-ES | 208.5 | 1.5 | ≥0.2 | 0.000065 |
| MA-ESN | 208.5 | 1.5 | ≥0.2 | 0.000096 |
NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Results obtained by the Wilcoxon test for algorithm BMDE at accuracy level ε = 1.0E−3.
| Algorithm | Ranking |
|---|---|
| BMDE | 3.05 |
| CDE | 8.475 |
| SDE | 9.85 |
| FERPSO | 7.275 |
| r2PSO | 10.175 |
| r3PSO | 10.2 |
| r2PSO-lhc | 9.25 |
| r3PSO-lhc | 9.4 |
| NSDE | 8.65 |
| NShDE | 3.875 |
| NCDE | 4.2 |
| MOMMOP | 2.8 |
| SCMA-ES | 9.075 |
| MA-ESN | 8.725 |
BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Average ranking of the algorithms (Friedman) at accuracy level ε = 1.0E−3.
| VS | R+ | R– | Exact P-Value | Asymptotic P-Value |
|---|---|---|---|---|
| CDE | 185.0 | 5.0 | ≥0.2 | 0.000187 |
| SDE | 188.5 | 1.5 | ≥0.2 | 0.000144 |
| FERPSO | 199.0 | 11.0 | ≥0.2 | 0.000393 |
| r2PSO | 188.5 | 1.5 | ≥0.2 | 0.000123 |
| r3PSO | 208.5 | 1.5 | ≥0.2 | 0.000082 |
| r2PSO-lhc | 188.5 | 1.5 | ≥0.2 | 0.000123 |
| r3PSO-lhc | 188.5 | 1.5 | ≥0.2 | 0.000096 |
| NSDE | 205.0 | 5.0 | ≥0.2 | 0.000152 |
| NShDE | 149.5 | 40.5 | ≥0.2 | 0.025364 |
| NCDE | 164.5 | 25.5 | ≥0.2 | 0.004043 |
| MOMMOP | 94.5 | 115.5 | ≥0.2 | 1 |
| SCMA-ES | 208.5 | 1.5 | ≥0.2 | 0.000089 |
| MA-ESN | 208.5 | 1.5 | ≥0.2 | 0.000096 |
BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Results obtained by the Wilcoxon test for algorithm BMDE at accuracy level ε = 1.0E−4.
To further determine the ranking of the 14 compared algorithms, the Friedman’s test, which is also implemented by using KEEL software, is conducted. As shown in Table 12, the overall ranking sequences for the test problems are MOMMOP, BMDE, NShDE, NCDE, FERPSO, CDE, NSDE, MA-ESN, SCMA-ES, r2PSO-lhc, r3PSO-lhc, SDE, r2PSO, r3PSO at ε = 1.0E−3. Table 13 shows that the overall ranking sequences for the test problems are MOMMOP, BMDE, NShDE, NCDE, FERPSO, MA-ESN, SCMA-ES, SDE, NSDE, CDE, r3PSO-lhc, r2PSO-lhc, r3PSO, r2PSO at ε = 1.0E−4. Table 14 shows that the overall ranking sequences for the test problems are BMDE, MOMMOP, NShDE, NCDE, FERPSO, SCMA-ES, MA-ESN, SDE, CDE, r3PSO-lhc, r3PSO, NSDE(r2PSO-lhc), r2PSO at ε = 1.0E−5. The average rank of NSDE is the same as that of r2PSO-lhc. In general, the ranking value of BMDE and MOMMOP are approximately equal. Therefore, it can be concluded that the evolution strategies used in BMDE are effective.
| Algorithm | Ranking |
|---|---|
| BMDE | 2.875 |
| CDE | 9.375 |
| SDE | 9.225 |
| FERPSO | 7.225 |
| r2PSO | 10.675 |
| r3PSO | 10.15 |
| r2PSO-lhc | 9.45 |
| r3PSO-lhc | 9.425 |
| NSDE | 9.35 |
| NShDE | 3.85 |
| NCDE | 4.2 |
| MOMMOP | 2.85 |
| SCMA-ES | 8.4 |
| MA-ESN | 7.95 |
BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Average ranking of the algorithms (Friedman) at accuracy level ε = 1.0E−4.
| VS | R+ | R– | Exact P-Value | Asymptotic P-Value |
|---|---|---|---|---|
| CDE | 185.0 | 5.0 | ≥0.2 | 0.000234 |
| SDE | 188.5 | 1.5 | ≥0.2 | 0.000133 |
| FERPSO | 178.0 | 12.0 | ≥0.2 | 0.000646 |
| r2PSO | 188.5 | 1.5 | ≥0.2 | 0.000123 |
| r3PSO | 208.5 | 1.5 | ≥0.2 | 0.000082 |
| r2PSO-lhc | 188.5 | 1.5 | ≥0.2 | 0.000096 |
| r3PSO-lhc | 208.5 | 1.5 | ≥0.2 | 0.000065 |
| NSDE | 208.5 | 1.5 | ≥0.2 | 0.000065 |
| NShDE | 168.0 | 42.0 | ≥0.2 | 0.017231 |
| NCDE | 182.5 | 27.5 | ≥0.2 | 0.003289 |
| MOMMOP | 95.5 | 114.5 | ≥0.2 | 1 |
| SCMA-ES | 208.5 | 1.5 | ≥0.2 | 0.000096 |
| MA-ESN | 208.5 | 1.5 | ≥0.2 | 0.000103 |
BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Results obtained by the Wilcoxon test for algorithm BMDE at accuracy level ε = 1.0E−5.
| Algorithm | Ranking |
|---|---|
| BMDE | 2.725 |
| CDE | 9.575 |
| SDE | 9.25 |
| FERPSO | 7.175 |
| r2PSO | 10.45 |
| r3PSO | 9.75 |
| r2PSO-lhc | 9.975 |
| r3PSO-lhc | 9.675 |
| NSDE | 9.975 |
| NShDE | 4.075 |
| NCDE | 4.125 |
| MOMMOP | 2.825 |
| SCMA-ES | 7.625 |
| MA-ESN | 7.8 |
BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Average ranking of the algorithms (Friedman) at accuracy level ε = 1.0E−5.
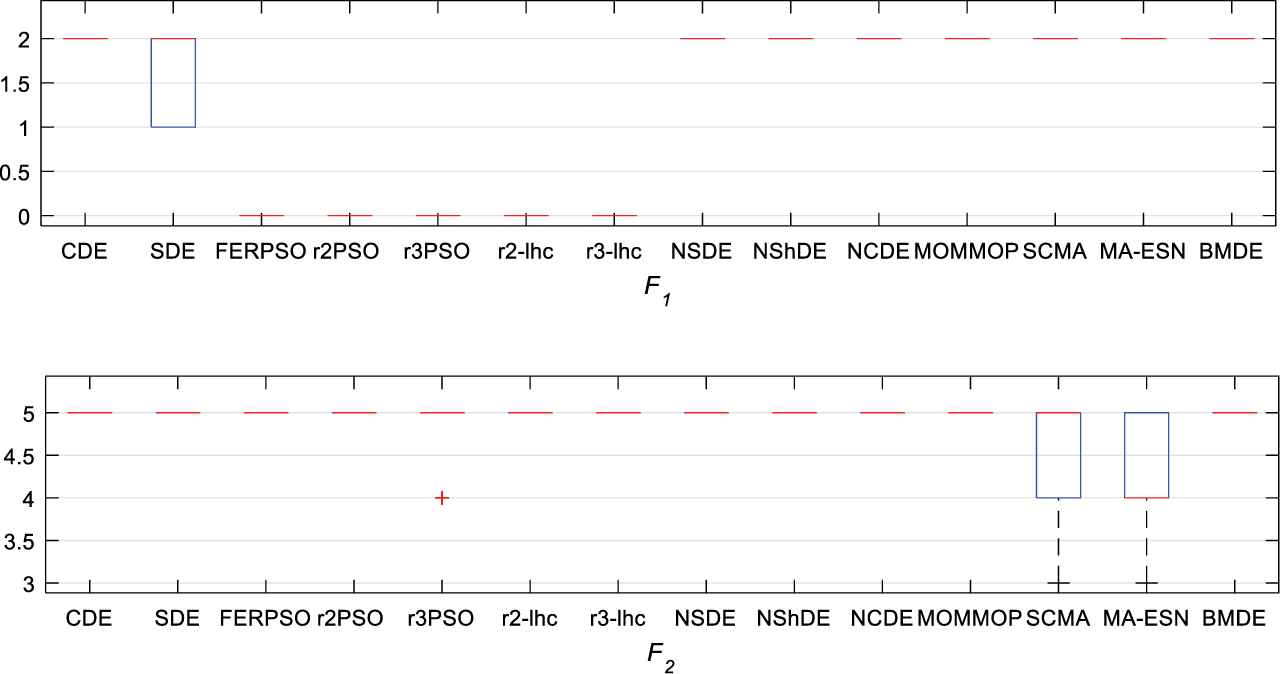
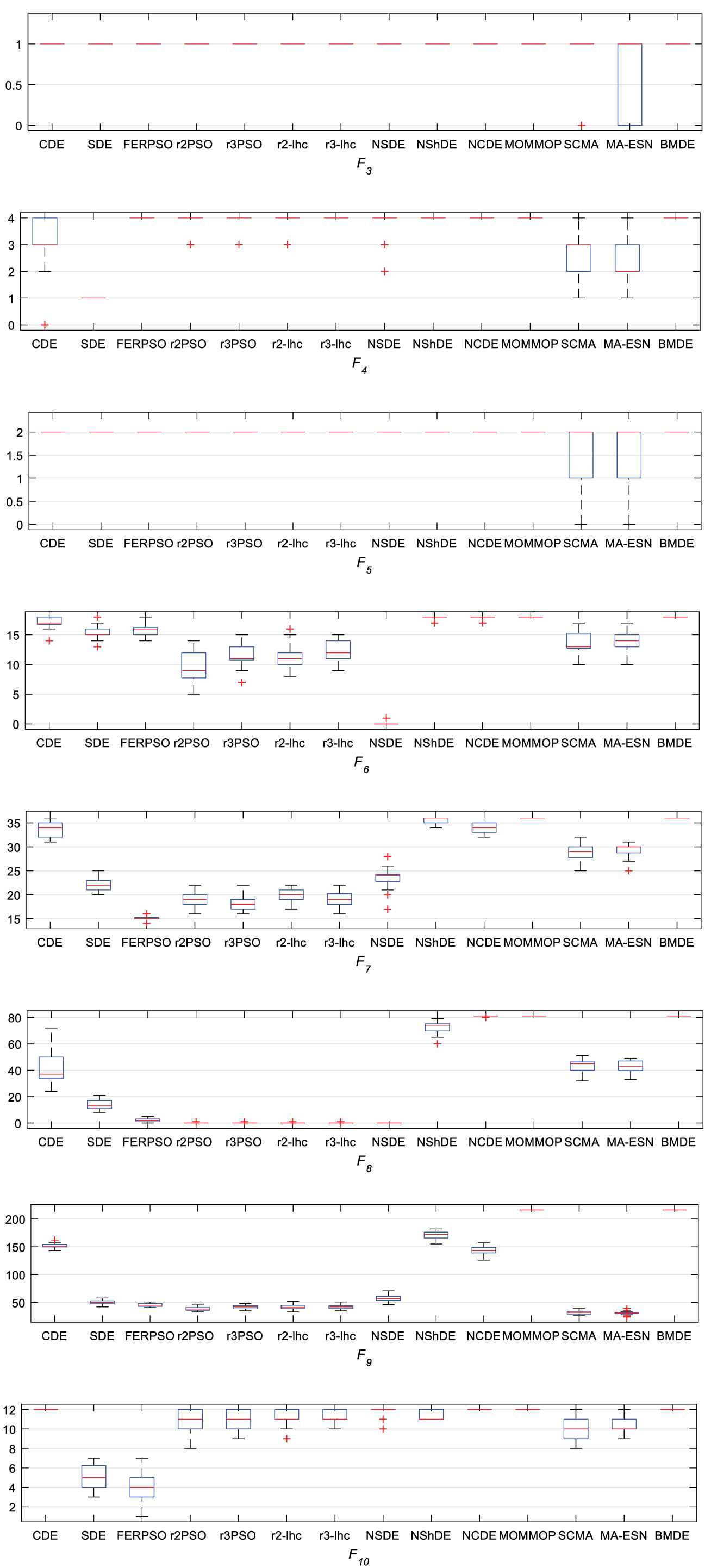
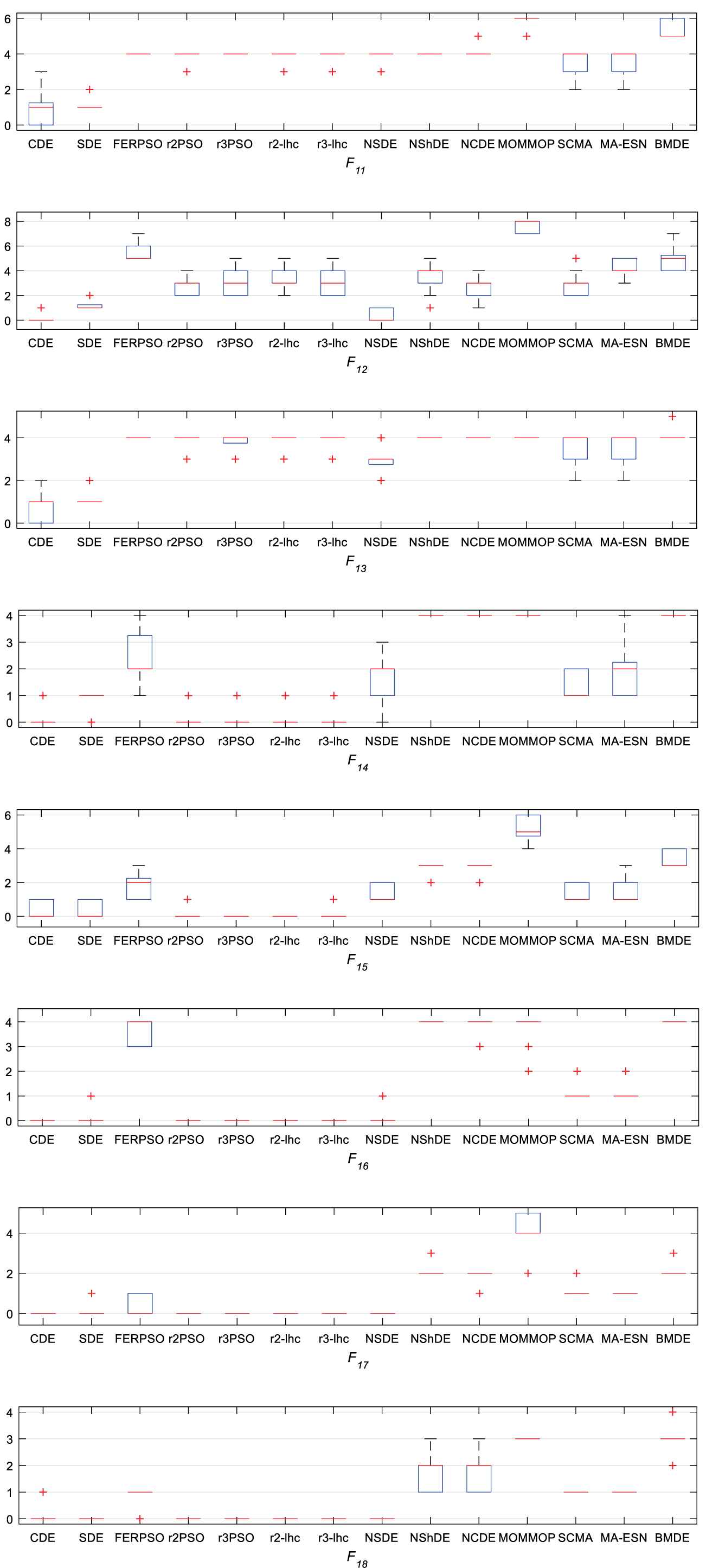
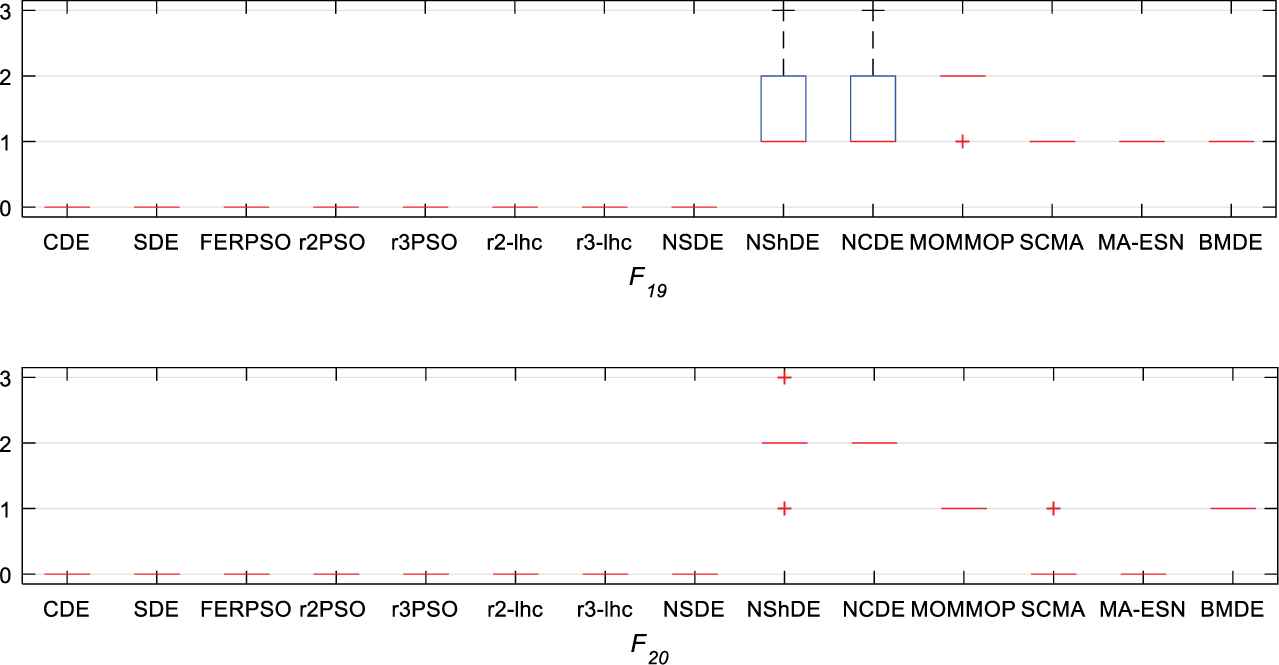
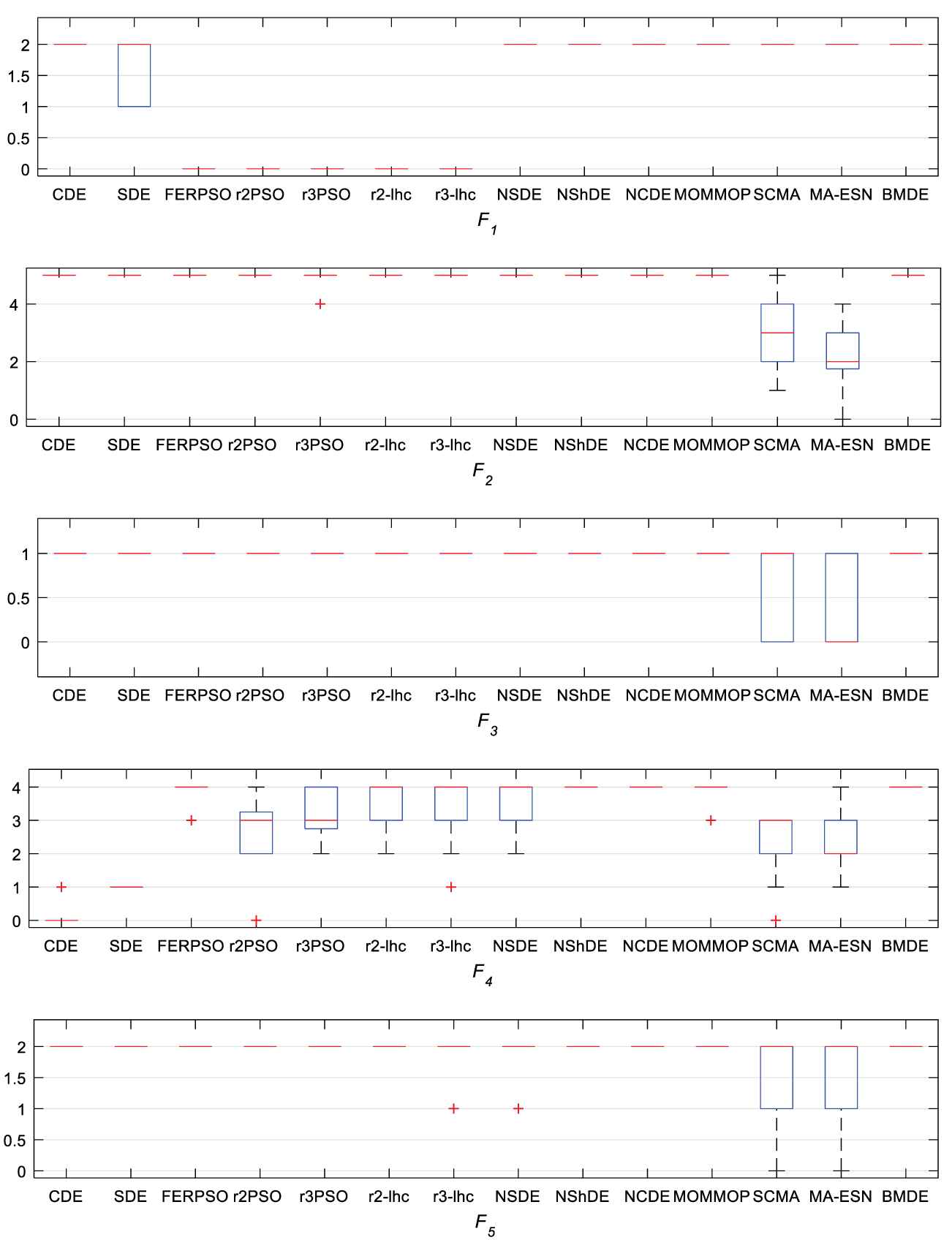
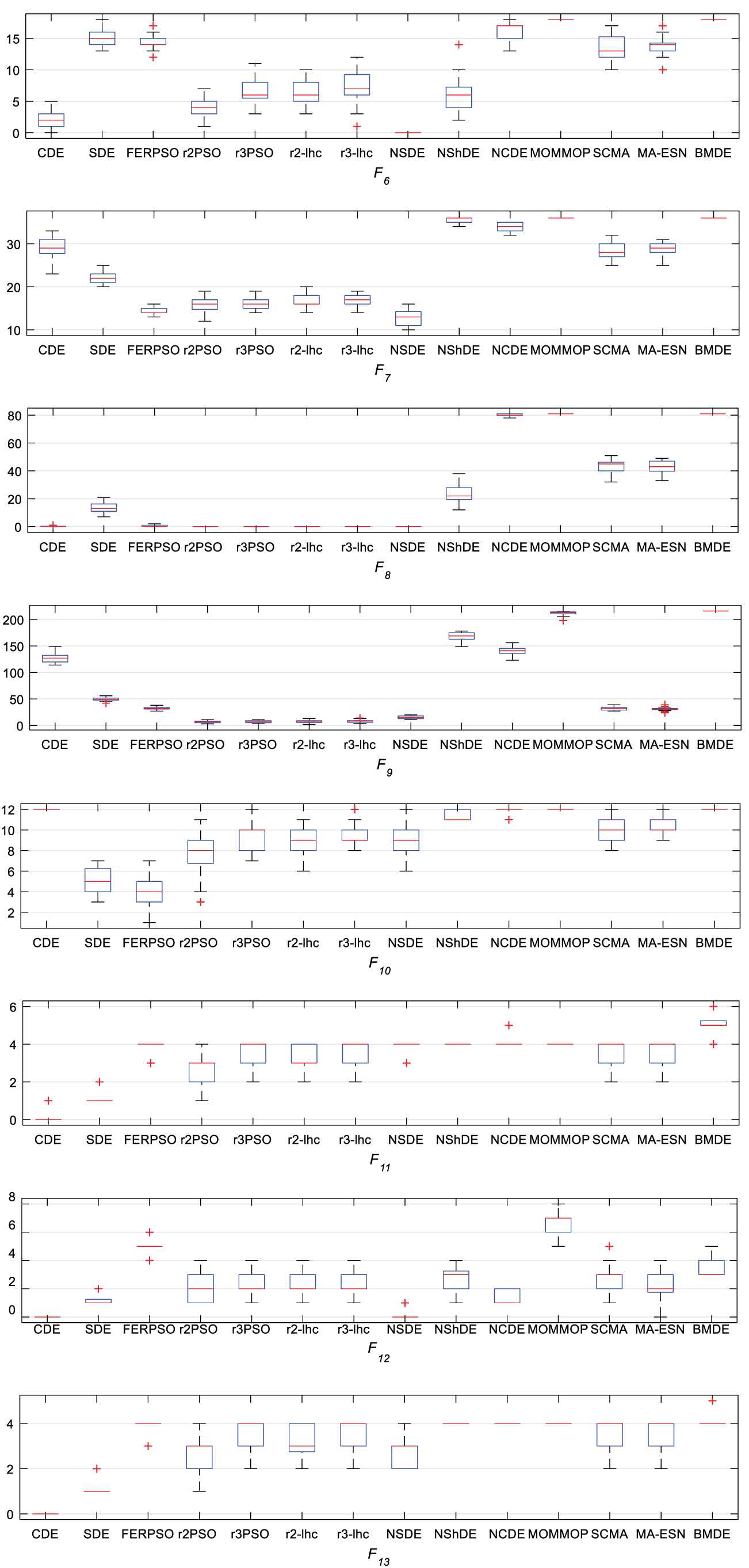
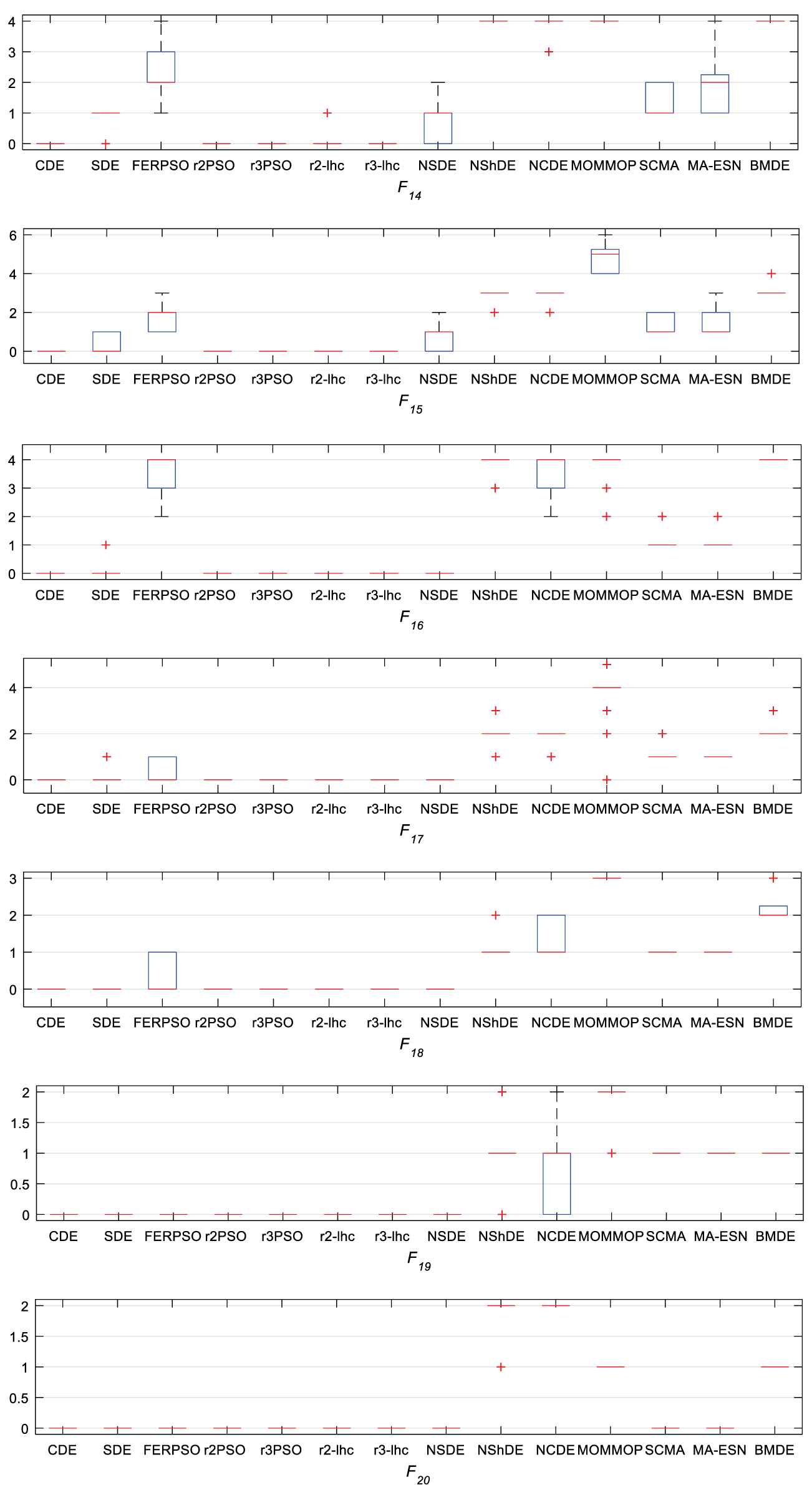
In order to intuitively display the number of global optimal solutions found by each algorithm, Figures 2–4 show the results of average number of peaks (ANP) obtained in 25 independent runs by each algorithm for function F1–F20 at ε = 1.0E−3, ε = 1.0E−4, and ε = 1.0E−5, respectively. ANP denotes the average number of peaks found by an algorithm over all runs. In addition, in order to make Figures 2–4 clearer, r2PSO-lhc, r3PSO-lhc, SCMA-ES are denoted as r2-lhc, r3-lhc, and SCMA for short, respectively.
Box-plot of ANP found by BMDE, CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on F1−F20 at accuracy level ε = 1.0E−3. ANP, average number of peaks; BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
Box-plot of ANP found by BMDE, CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on F1−F20 at accuracy level ε = 1.0E−4. ANP, average number of peaks; BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
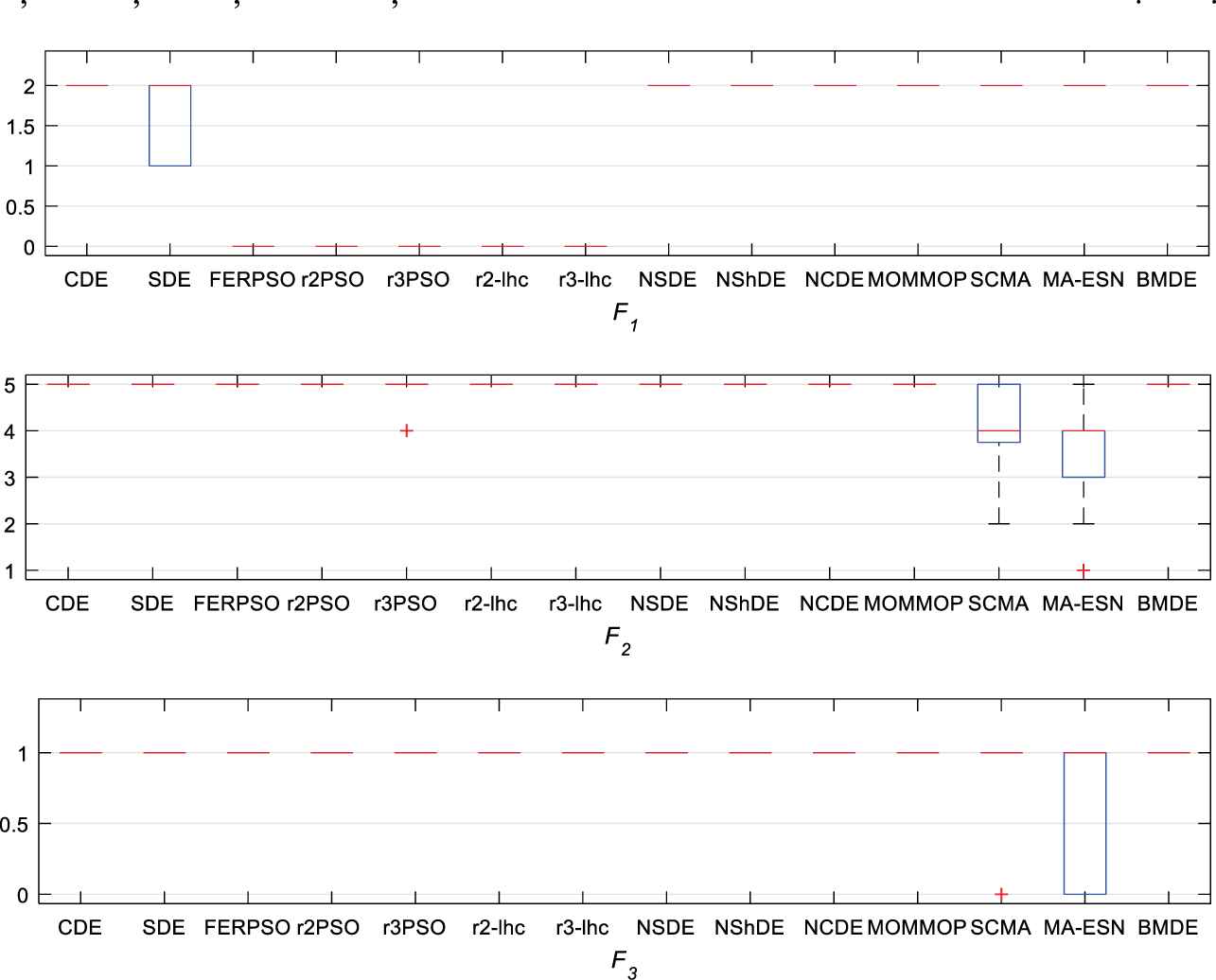
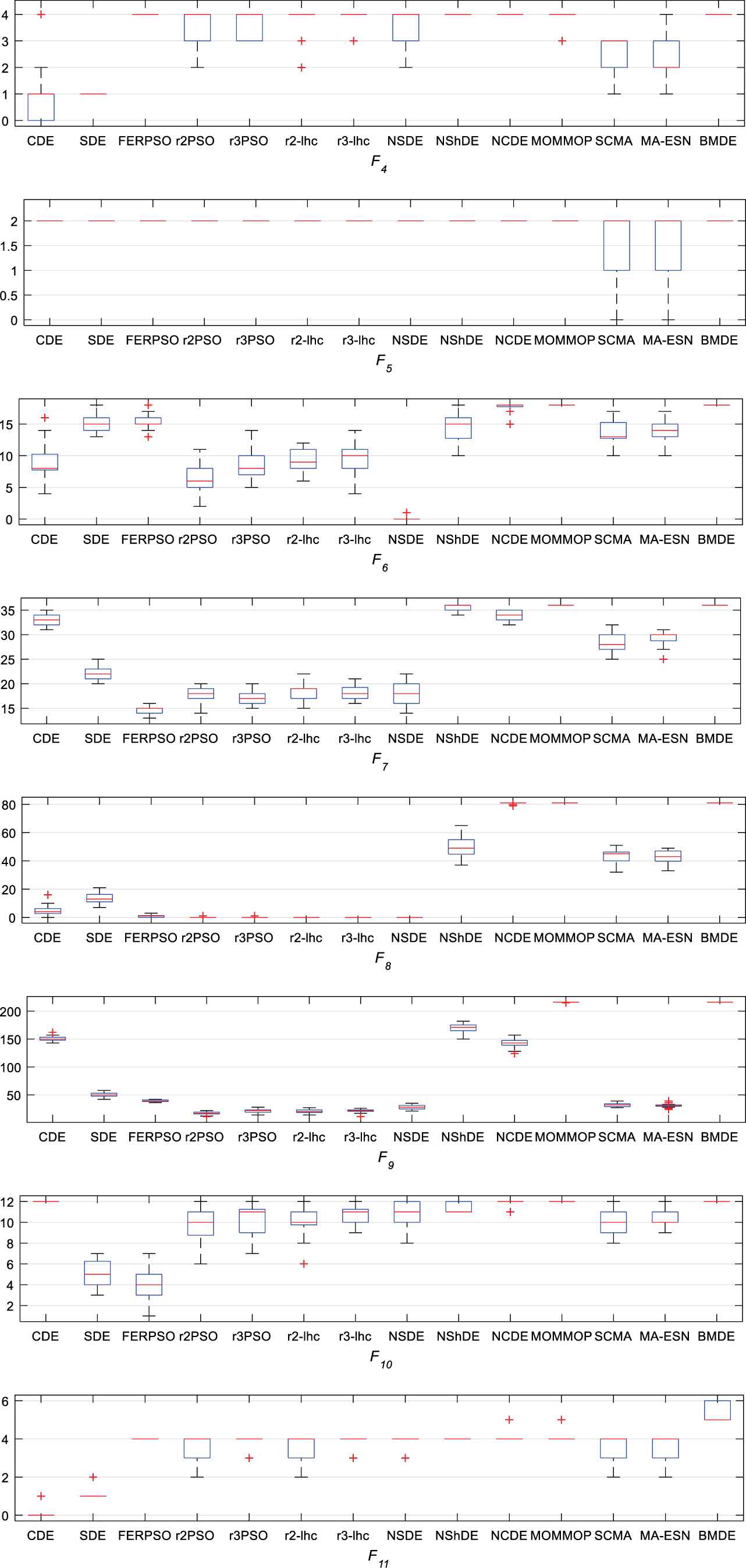
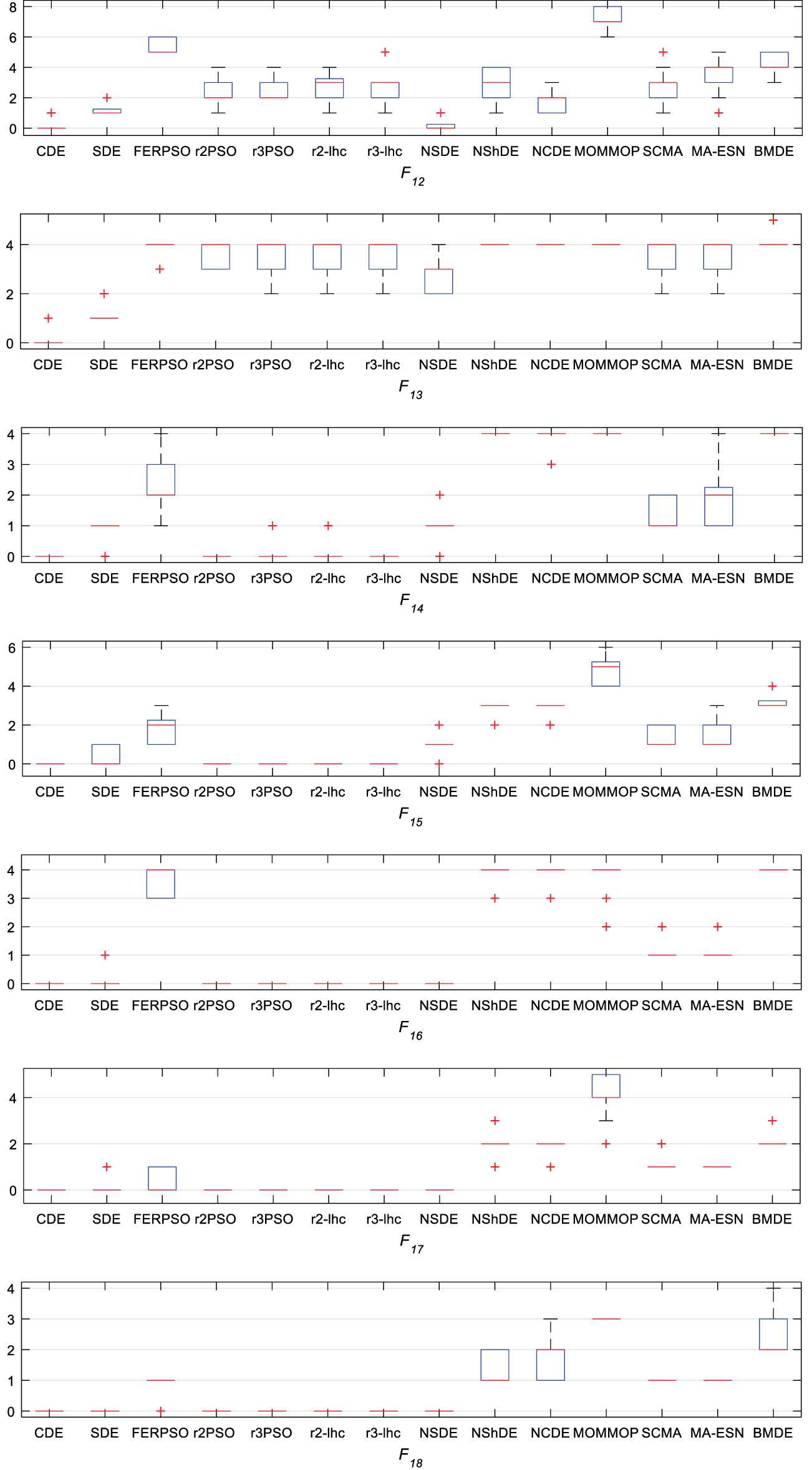
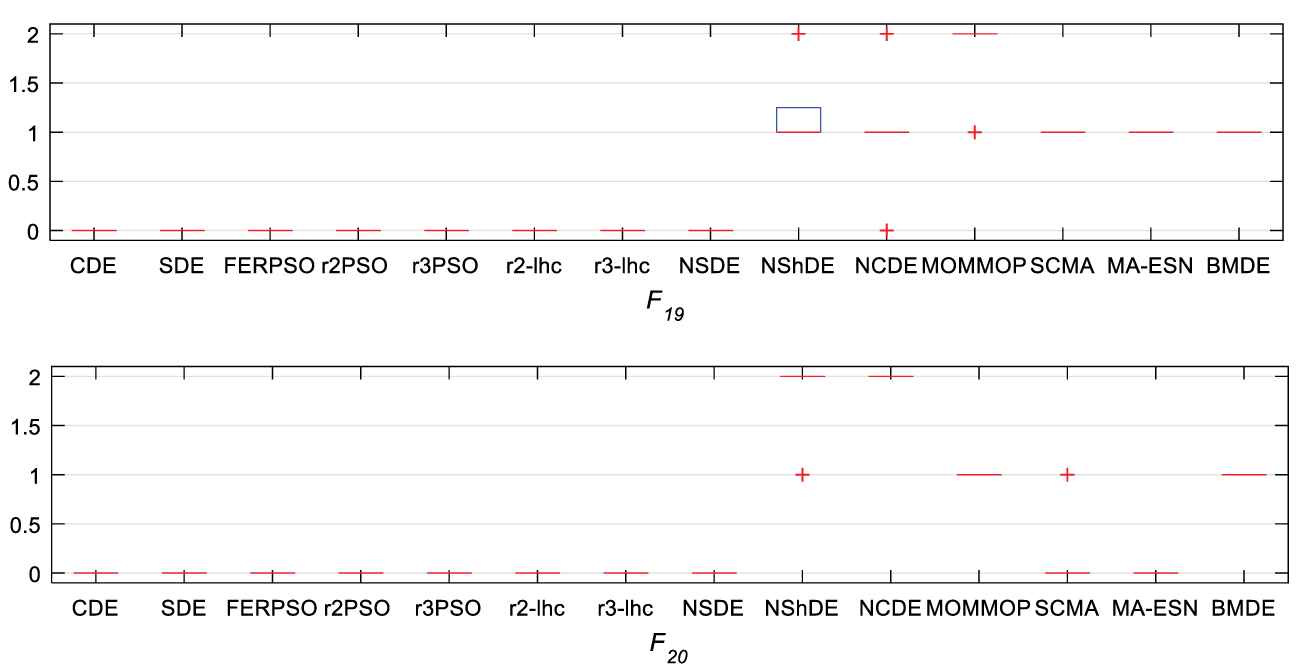
Box-plot of ANP found by BMDE, CDE, SDE, FERPSO, r2PSO, r3PSO, r2PSO-lhc, r3PSO-lhc, NSDE, NShDE, NCDE, MOMMOP, SCMA-ES, and MA-ESN on F1−F20 at accuracy level ε = 1.0E−5. ANP, average number of peaks; BMDE, bi-population and multi-mutation differential evolution; NSDE, neighborhood-based SDE; CDE, crowding differential evolution; SDE, species differential evolution; FERPSO, fitness-Euclidean distance ration particle swarm optimization; PSO, particle swarm optimization; NShDE, neighborhood-based sharing DE; NCDE, neighborhood-based CDE; MOMMOP multiobjective optimization for MMOPs; SCMA-ES, self-adaptive niching CMA-ES; MA-ESN, matrix adaptation evolution strategy with dynamic niching.
6. CONCLUSION
This paper presents an enhanced DE with bi-population and multi-mutation strategy for multimodal optimization problems. In the proposed algorithm, the advantages of different mutation strategies and multi-population are embedded into DE algorithm. Firstly, the proposed algorithm employs two different mutation strategies to explore and exploit in parallel to find multiple optimal solutions. Furthermore, the differences between the inferior individuals and the current individuals are employed to provide a promising direction toward the optimum. Finally, individuals with high similarity are updated to improve population diversity. The experimental results suggest that BMDE can achieve a better and more consistent performance than most multimodal optimization algorithms on CEC2013 test problems. Future work will improve the performance of BMDE to solve F11−F20 effectively. In addition, we will extend the BMDE to solve the multiobjective optimization problems, constrained optimization problems, and real-world applications.
CONFLICT OF INTEREST
The authors have declared no conflicts of interest.
AUTHORS' CONTRIBUTIONS
All authors contributed to the work. All authors read and approved the final manuscript.
ACKNOWLEDGMENTS
This research is partly supported by the Doctoral Foundation of Xi’an University of Technology (112-451116017), National Natural Science Foundation of China under Project Code (61803301, 61773314), and the Scientific Research Foundation of the National University of Defense Technology (grant no. ZK18-03-43).
REFERENCES
Cite this article
TY - JOUR AU - Wei Li AU - Yaochi Fan AU - Qingzheng Xu PY - 2020 DA - 2020/09/11 TI - Evolutionary Multimodal Optimization Based on Bi-Population and Multi-Mutation Differential Evolution JO - International Journal of Computational Intelligence Systems SP - 1345 EP - 1367 VL - 13 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.d.200826.001 DO - 10.2991/ijcis.d.200826.001 ID - Li2020 ER -