
Almost Automorphic Solutions to Cellular Neural Networks With Neutral Type Delays and Leakage Delays on Time Scales
- DOI
- 10.2991/ijcis.d.200107.001How to use a DOI?
- Keywords
- Cellular neural networks; Almost automorphic solution; Exponential stability; Leakage delay; Neutral type delay
- Abstract
In this paper, cellular neural networks (CNNs) with neutral type delays and time-varying leakage delays are investigated. By applying the existence of the exponential dichotomy of linear dynamic equations on time scales, a fixed point theorem and the theory of calculus on time scales, a set of sufficient conditions which ensure the existence and exponential stability of almost automorphic solutions of the model are obtained. An example with its numerical simulations is given to support the theoretical findings.
- Copyright
- © 2020 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Since the cellular neural networks with delay were first introduced and investigated by Roska and Chua [1], they have been extensively applied in various different fields such as classification of pattern and processing of moving images. In recent years, extensive results on the existence and stability of equilibrium points, periodic solutions, almost periodic solutions and anti-periodic solutions for cellular neural networks have been reported. For example, Fan and Shao [2] investigated the positive almost periodic solutions for shunting inhibitory cellular neural networks with time-varying and continuously distributed delays, Li and Wang [3] analyzed the existence and exponential stability of the almost periodic solutions of shunting inhibitory cellular neural networks on time scales, Xia et al. [4] established the sufficient conditions for the existence and exponential stability of almost periodic solution for shunting inhibitory cellular neural networks with impulses, Peng and Wang [5] addressed the existence and exponential stability of anti-periodic solutions to shunting inhibitory cellular neural networks with time-varying delays in leakage terms. For more related work on shunting inhibitory cellular neural networks, one can see [4, 6–17].
Many scholars [18–21] argue that neural networks usually contain some information about the derivative of the past state to further describe and model the dynamics for the complex neural reactions. Then some authors focused on the dynamical behaviors of neutral type neural networks. For example, Rakkiyappan et al. [22] considered the global exponential stability for neutral-type impulsive neural networks, Li et al. [23] discussed the existence of periodic solutions for neutral type cellular neural networks with delays, Bai [24] investigated the global stability of almost periodic solutions of Hopfield neural networks with neutral time-varying delays. In details, we refer the reader to [25–30].
Very recently, a typical time delay called Leakage (or “forgetting”) delay may exist in the negative feedback terms of the neural network system, and these terms are variously known as forgetting or leakage terms [31,32]. Since time delays in the leakage term are difficult to handle but have great impact on the dynamical behavior of neural networks. Therefore, it is meaningful to consider neural networks with time delays in leakage terms [34].
It is well known that both continuous time and discrete time neural networks play an equal roles in various applications [34]. But it is troublesome to study the dynamical properties for continuous and discrete time systems, respectively. In 1990, Hilger [35] proposed the theory of time scales which can deal with both difference and differential calculus in a consistent way. Thus it is significant to investigate the dynamical behaviors of neural networks on time scales. For instance, some authors [3,36–40] investigated periodic solutions, almost periodic solutions and anti-periodic solutions of some neural networks on time scales.
In addition, we shall point out that in real word, almost periodicity is universal than periodicity. Moreover, almost automorphic functions, which were introduced by Bochner, are much more general than almost periodic functions. In addition, the almost automorphic solutions of neural networks can be applied in many areas such as automatic control, image processing, psychophysics, robotics and so on [41–45]. Almost automorphic solutions in the context of differential equations were studied by several authors. We refer the reader to [46–53]. However, to the best of our knowledge, there is no paper published on the almost automorphic solutions of cellular neural networks with neutral type delays and time-varying leakage delays on time scales.
Inspired by the discussion above, in this paper, we consider the following cellular neural networks with neutral type delays and time-varying leakage delays on time scales
The main aim of this article is to establish some sufficient conditions for the existence and global exponential stability of almost automorphic periodic solutions of (1). By applying the existence of the exponential dichotomy of linear dynamic equations on time scales, a fixed point theorem and the theory of calculus on time scales, we obtain a set of sufficient conditions for the existence and exponential stability of almost automorphic solutions for model (1).
For convenience, we denote by
The remainder of the paper is organized as follows. In Section 2, we introduce some lemmas and definitions, which can be used to check the existence of almost automorphic solutions of system (1). In Section 3, we present some sufficient conditions for the existence of almost automorphic solutions of (1). Some sufficient conditions on the global exponential stability of almost automorphic solutions of (1) are established in Section 4. An example is given to illustrate the effectiveness of the obtained results in Section 5. A brief conclusion is drawn in Section 6.
2. PRELIMINARY RESULTS
In this section, we would like to recall some basic definitions and lemmas which are used in what follows.
Definition 2.1.
[54] Let
Lemma 2.1.
[54] Assume that
Lemma 2.2.
[54] Let
Lemma 2.3.
[54] Assume that
Definition 2.2.
[54] A function
Lemma 2.4.
[54] Suppose that
if
Lemma 2.5.
[54] If
Lemma 2.6.
[54] Let
Next, we recall some definitions of almost automorphic functions on time scales.
Definition 2.3.
[55] A time scale
Definition 2.4.
[54] Let
A function
A continuous function
Lemma 2.7.
[53] Let
if
Lemma 2.8.
[34] Let
Definition 2.5.
[55] Let
Lemma 2.9.
[53] Suppose that
Lemma 2.10.
[55] Let
Definition 2.6.
[34] Let
Then the solution
3. EXISTENCE OF ALMOST AUTOMORPHIC SOLUTIONS
In this section, we will establish sufficient conditions on the existence of pseudo almost periodic solutions of (1). Let
(H1)
(H2)
(H3)
Theorem 3.1.
If (H1)–(H3) are satisfied. Then there exists a unique almost automorphic solution of system (1) in
Proof
For any given
It follows from Lemma 2.10 that the linear system
For
Define an operator as follows
First we show that for any
Thus we get
On the other hand, for
It follows from (H3) that
Then
In view of (H3), we get that
4. EXPONENTIAL STABILITY OF ALMOST AUTOMORPHIC SOLUTIONS
In this section, we will obtain the exponential stability of the almost automorphic solutions of system (1).
Theorem 4.1.
Suppose that (H1)–(H3) are fulfilled. Then the almost automorphic solution of system (1) is globally exponentially stable.
Proof
By Theorem 3.1, we know that (1) has an almost automorphic solution
The initial condition of (19) is
Rewrite (19) as the form
It follows from (21) that for
Since
By (H3), we know that
Moreover, we have that
We claim that
To prove this (32), we show that for any
By way of contradiction, assume that (33) does not hold. Now we consider the two cases.
Case 1. (34) is not true and (35) is true. Then there exists
Therefore, there exists a constant
By (22), for
Case 2. (35) is not true and (34) is true. Then there exists
Therefore, there exists a constant
By (22), for
Remark 4.1.
In [2–4,7], the scholars considered the almost periodic solution for different type neural networks. In [5,8,10,11,39], the authors investigated anti-periodic solutions to various neural networks. The research topic of [2–5,7,8,10,11,39] did not involve almost automorphic solution. In this article, we have analyzed the almost automorphic solutions to cellular neural networks with neutral type delays and time-varying leakage delays on time scales. The obtained theoretical results in [2–5,7,8,10,11,39] cannot be applied to system (1) to derive the existence and the exponential stability of almost automorphic solutions for system (1). From this viewpoint, we can say that the main results on the existence and the exponential stability of almost automorphic solutions for system (1) are completely new and complement previous publications.
5. AN EXAMPLE
Considering the following cellular neural networks with neutral type delays and time-varying leakage delays on time scales
Then we get
It is not difficult to verify that all assumptions in Theorems 4.1 and 4.2 are fulfilled. Thus we can conclude that (1) has an almost automorphic solution, which is globally exponentially stable. The results are verified by the numerical simulations in Figures 1 and 2.
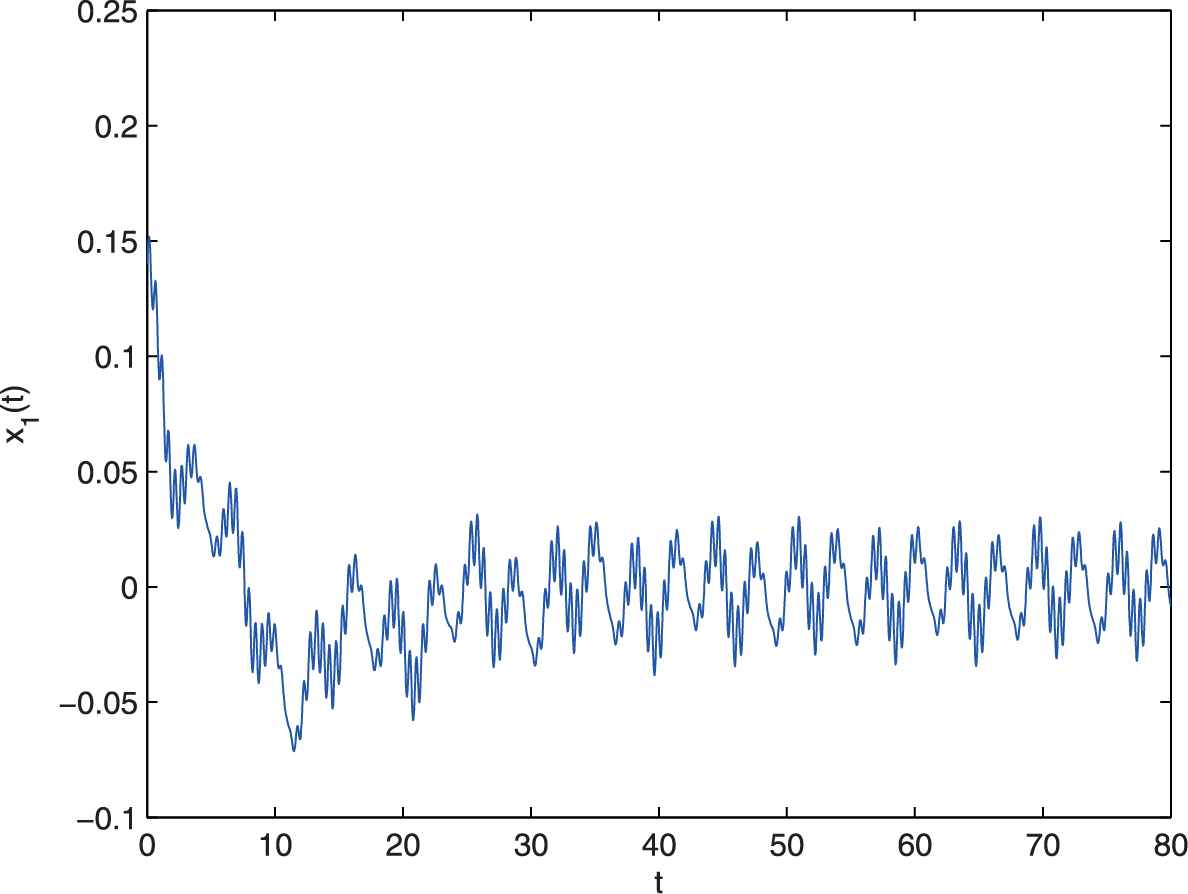
The relation of t and x1.
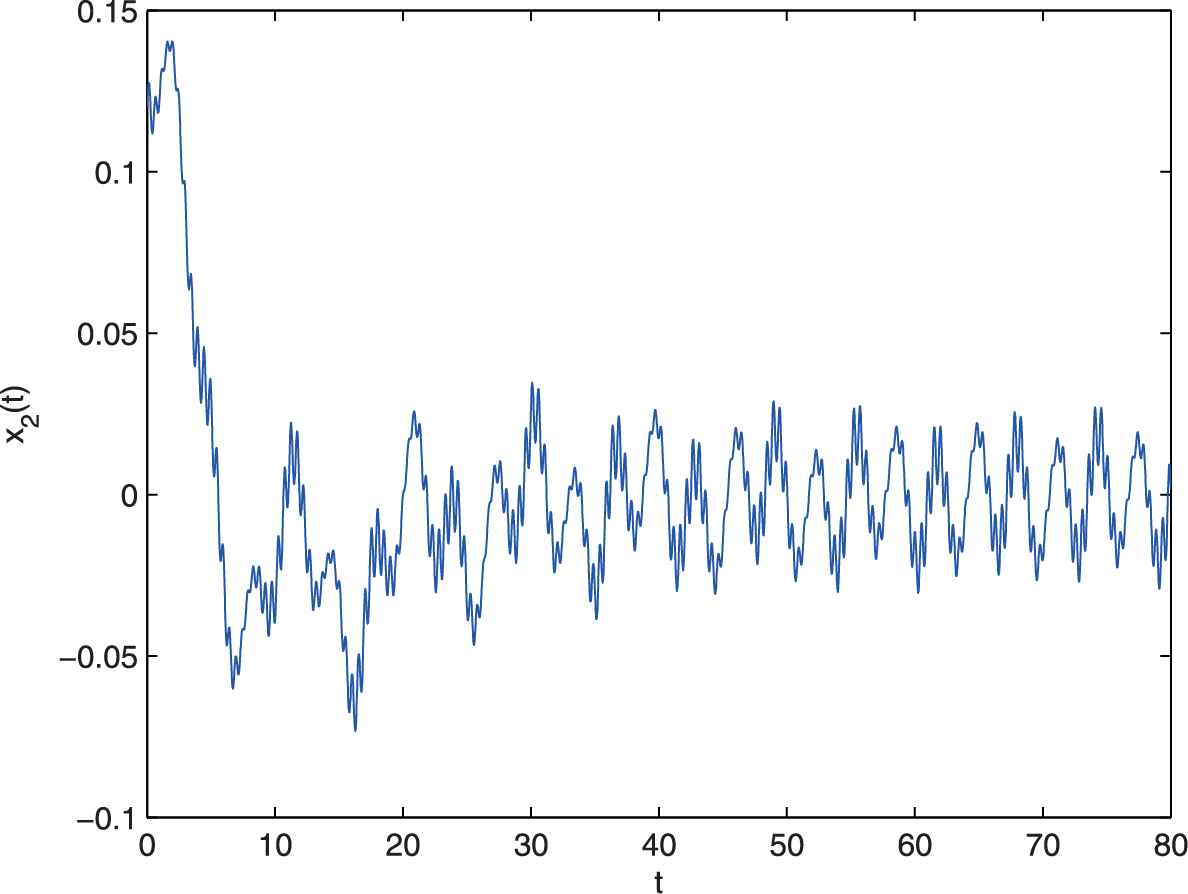
The relation of t and x2.
6. CONCLUSIONS
In this paper, we investigate a class of cellular neural networks with neutral type delays and time-varying leakage delays. Applying the existence of the exponential dichotomy of linear dynamic equations on time scales, a fixed point theorem and the theory of calculus on time scales, we establish a series of sufficient conditions for the existence and exponential stability of almost automorphic solutions for the cellular neural networks with neutral type delays and time-varying leakage delays on time scales. We show that the existence and global exponential stability of almost automorphic solutions for system (1) only depends on time delays
CONFLICT OF INTEREST
The authors declare that they have no competing interests.
AUTHORS' CONTRIBUTIONS
The study was conceived and designed by Changjin Xu and Maoxin Liao and experiments performed by Peiluan Li and Zixin Liu. All authors read and approved the manuscript.
ACKNOWLEDGMENTS
The work is supported by National Natural Science Foundation of China (No. 61673008), Project of High-level Innovative Talents of Guizhou Province ([2016]5651), Major Research Project of The Innovation Group of The Education Department of Guizhou Province ([2017]039), Innovative Exploration Project of Guizhou University of Finance and Economics ([2017]5736-015), Project of Key Laboratory of Guizhou Province with Financial and Physical Features ([2017]004), Hunan Provincial Key Laboratory of Mathematical Modeling and Analysis in Engineering (Changsha University of Science & Technology)(2018MMAEZD21), University Science and Technology Top Talents Project of Guizhou Province (KY[2018]047), Guizhou University of Finance and Economics (2018XZD01) and Foundation of Science and Technology of Guizhou Province ([2019]1051). The authors would like to thank the referees and the editor for helpful suggestions incorporated into this paper.
REFERENCES
Cite this article
TY - JOUR AU - Changjin Xu AU - Maoxin Liao AU - Peiluan Li AU - Zixin Liu PY - 2020 DA - 2020/01/15 TI - Almost Automorphic Solutions to Cellular Neural Networks With Neutral Type Delays and Leakage Delays on Time Scales JO - International Journal of Computational Intelligence Systems SP - 1 EP - 11 VL - 13 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.d.200107.001 DO - 10.2991/ijcis.d.200107.001 ID - Xu2020 ER -