
Control System for Maintaining Safe Following Distance while Driving
- DOI
- 10.2991/jrnal.k.190220.012How to use a DOI?
- Keywords
- Driving safety; safe distance; driving speed; weather conditions
- Abstract
Safety is the most important issue while driving. Many traffic accidents occur because of insufficient safe distance. With the advancement of technology, there are cars with a front distance safety warning system. Some of them are with fixed safe distance regardless of the speed of the car. Other advanced distance detection systems switch between different modes such as high speed and low speed. In this paper, we proposed a driving safety system which can dynamically adjust the safe distance between vehicles depending on the speed and weather conditions. This system can be used to determine and maintain safe distances both in front and rear of a car. This idea has obtained an invention patent of Taiwan. A car with this system can be driven more safely.
- Copyright
- © 2019 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Living in this era, transportation is inseparable from people’s daily lives. Many people often drive to work or travel. For some people, driving is their work. So, driving safety is an absolutely important part for them. According to the annual report of the Freeway Bureau, Ministry of Transportation and Communications (MOTC), Taiwan, the reasons for the top ten accidents on the super highway of Taiwan in 2015 are as follows [1]:
- (i)
Not maintaining the driving safety distance (50.5%).
- (ii)
Not appropriately changing lanes or directions (12.8%).
- (iii)
Not paying attention to the state in front of the car (10.3%).
- (iv)
Other violations that caused accidents (8.0%).
- (v)
Backing the car without accordance with regulations (2.2%).
- (vi)
Wheel shedding or tire burst (1.8%).
- (vii)
Loading goods not safely fixed (1.3%).
- (viii)
Drunk driving (1.1%).
- (ix)
Vehicle parts falling (0.7%).
- (x)
Not maintaining driving safety interval (0.6%).
Traffic accident analysis reports in many countries have similar conclusions. Statistics of traffic accidents show one of the most common causes of traffic accidents to be the “failure to observe a safe distance behind another vehicle [2].” There are three safe distance required in car-following [3]: front safe distance, rear safe distance, and lateral safe distance, as shown in Figure 1. Everybody knows that keep safe distance in driving is very important. Considering the three safe distances, the front distance can almost completely controlled by the driver. Studies have shown that leaving more space between vehicles helps to reduce traffic accidents and allows for smoother traffic [4].
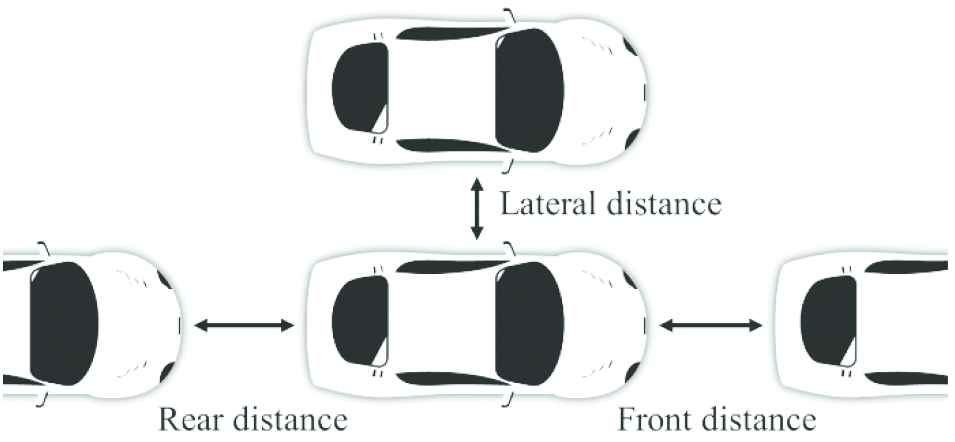
Distances that should be concerned by the driver.
There are many factors that may have influence on safe distance. For example, speed of the vehicle, driver’s attentiveness, size and condition of the vehicle, road surface, and weather conditions are all factors of the driving safety distance. An article of World Health Organization (WHO) shows that speed has been identified as a key risk factor in road traffic injuries, influencing both the risk of a road crash as well as the severity of the injuries that result from crashes [5]. A good suggestion for keeping safe driving distance is “two-second rule.” The rule is that a driver should ideally stay at least 2 s behind any vehicle that is directly in front of his or her vehicle [6]. However, counting seconds may cause distracting for the driver. Another guiding rule about safe distance (in meters (m)) on the super highway in Taiwan is half of the speed (in km/h) for small cars and speed −20 for large cars.
With the advancement of technology, there are cars with a front distance safety warning system. Some of them are with fixed safe distance regardless of the speed of the car. Other advanced distance detection systems switch between different modes such as high speed and low speed. However, from earlier discussions we know that the safe following distance closely regards to the speed of the vehicle. In this paper, we will propose a driving safety system which can dynamically adjust the safe distance between vehicles depending on the speed and weather conditions.
2. SYSTEM ARCHITECTURE
Our system is primarily designed to alert drivers when there is insufficient safe distance from the vehicle in front. The system architecture is shown in Figure 2. We modified the rule of safe distance promulgated by the Freeway Bureau, MOTC, Taiwan by considering the environment parameters such as uphill/downhill, heavy rain, and thick fog. Hence the driving safety distance can be adjusted dynamically. The function of the safety distance in front of the car is shown as Equation (1).
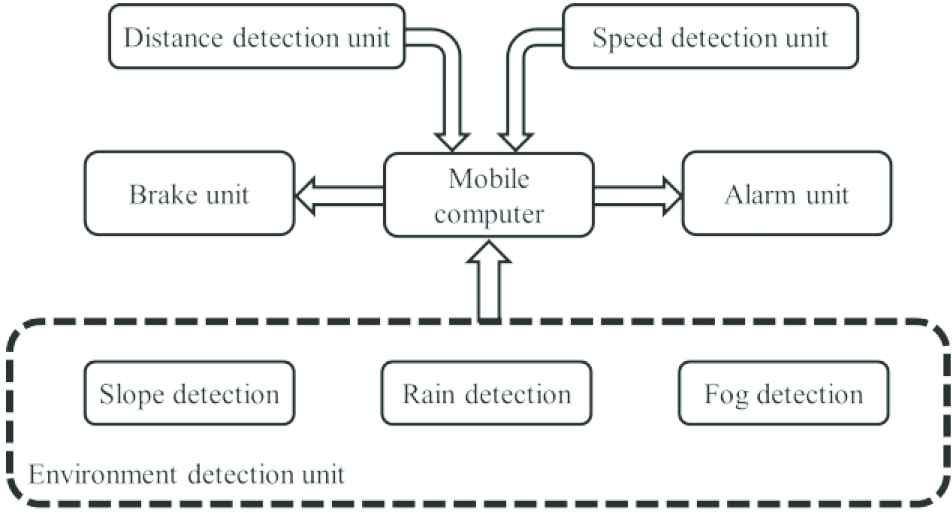
System architecture of the proposed system.
This system can be integrated into the driving computer to form a complete driving safety system, or it can be an independently-operated driving safety assistant system. For the integrated system, the system can remind the driver to slow down or automatically activate the brake system to force the deceleration when the safety distance is insufficient. For an independently operated system, the system can only alert the driver to slow down without any mandatory action.
The alarm unit can include an audio alert and a light alert. The sound or light warning in the car can remind the driver to properly slow down to avoid the danger of chasing. If there is a light warning at the rear of the vehicle, it can alert the driver of the rear car that the safety distance to the front vehicle and the vehicle in front can be reminded that it is insufficient. It is recommended that the rear vehicle should be properly decelerated.
This structure has been awarded the invention patent of Taiwan with certificate No. I594215 in August 2017.
3. EXPERIMENTAL SIMULATION
To promote our patent concept, we constructed a simple simulation experiment system. An HT66F50 is used as the central processing unit of the system. An ultrasonic sensor is used as the front distance detector. We use a sliding-type variable resistor to simulate the throttle acceleration system. To detect that the car is on an uphill/downhill state, we use two mercury switches configured as inverted V-type, as shown in Figure 3, to detect the attitude of the car. If the front switch is closed and the rear one is open, then the car is on a downhill slope. If both switches are closed, then the car is on a horizontal road. However, due to the acceleration will affect the action of the mercury switch, the mercury switch is not suitable for use on actual cars to detect uphill/downhill. An alternative way for the uphill/downhill detection is to use the relationship between throttle and speed changes. Our experimental car for simulation is shown in Figure 4. All circuits are packed into the cabin of a model car. An LCD (liquid-crystal display) for display the message of simulation result is mounted on the roof of the model car. Figure 5 shows that the car speed is at 95 km/h. No rain and no fog is detected at that time. By Equation (1), we know that the safe distance should be 47 m if the car is on a horizontal road. But from the display panel, we know that the car is in a downhill state. Hence the safety distance should be larger than 47 m. Figure 5 shows that the safety distance should be 70 m and the detected front distance is 39 m, and hence the alarm system will be activated.
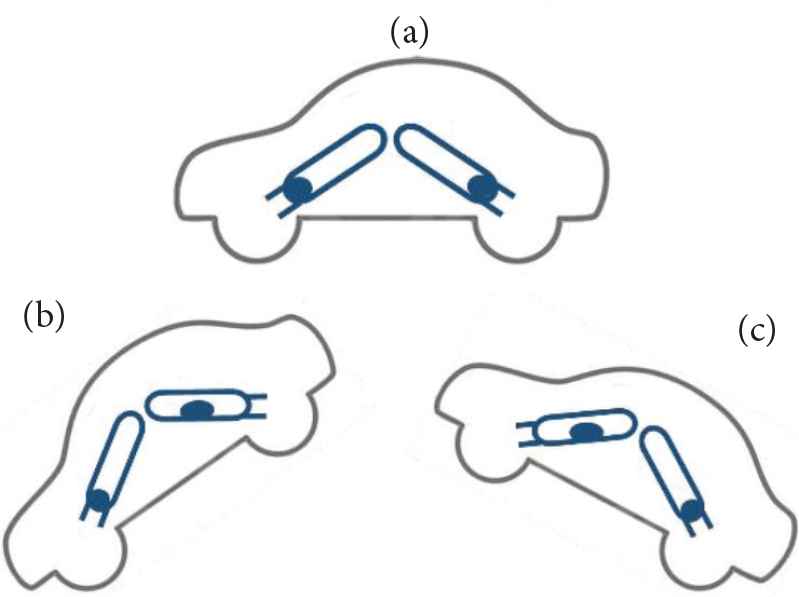
Car attitude. (a) Horizontal, (b) Downhill, (c) Uphill.

Our experimental car for simulation.

An experimental result of dynamic adjustment of safe distance.
4. DISCUSSION AND CONCLUSION
In this paper, we proposed a driving safety system which can dynamically adjust the safe distance between vehicles depending on the speed and weather conditions. This system can be used to determine and maintain safe distances both in front and rear of a car. Our technology has the following characteristics:
- •
The safe distance will be automatically adjusted with the speed and weather conditions. The faster the speed or the poor weather conditions, the longer the safe distance is.
- •
The safe distance will be automatically adjusted with the road slope. The safe distance of the downhill road will be automatically extended.
- •
With the front distance detection system, the vehicle can be alerted when the safe distance is insufficient, to remind the driver to decelerate properly to avoid the occurrence of chasing.
- •
If the system is mounted with the automatic brake assisting system, the brake deceleration can be automatically started in the case of insufficient safe distance to improve the road safety.
- •
With the rear distance detection system, in the case of insufficient safe distance of the rear vehicle, the driver should promptly accelerate or change the lane to avoid collision in the case of inconspicuous driving.
- •
The technology can also be applied to the automatic following system, which can keep the distance of vehicles in a safe region to improve the driver’s acceptance of the following system.
- •
In addition to being integrated into the safety design of a new car to improve the safety factor of the vehicle, the technology can also be used for retrofitting old vehicles as a driving safety facility.
- •
This technology is applicable to the automobile manufacturing industry and the automobile maintenance industry. The installation on the vehicle can greatly improve the driving safety factor.
- •
The technology can also be applied to locomotives or various types of moving vehicles to improve the safety factor of the vehicle.
This idea has obtained an invention patent of Taiwan. We deeply believe that a car with this system can be driven more safely.
Authors Introduction
Dr. Kuo-Hsien Hsia
 He is an Associate Professor at the Department of Electrical Engineering, Far East University, Tainan, Taiwan. He received his PhD degree from National Sun Yat-Sen University, Taiwan in 1994. His research interests include fuzzy systems, intelligent systems, and technical and vocational education.
He is an Associate Professor at the Department of Electrical Engineering, Far East University, Tainan, Taiwan. He received his PhD degree from National Sun Yat-Sen University, Taiwan in 1994. His research interests include fuzzy systems, intelligent systems, and technical and vocational education.
Mr. Jia-Hong Cai
 He graduated from Far East University, Tainan, Taiwan in 2017. He is currently a graduate student in the Department of Electrical Engineering, Far East University, Taiwan. His research interests include micro-chip applications and intelligent systems.
He graduated from Far East University, Tainan, Taiwan in 2017. He is currently a graduate student in the Department of Electrical Engineering, Far East University, Taiwan. His research interests include micro-chip applications and intelligent systems.
Mr. Shu-Li Pai
 He graduated from Far East University, Tainan, Taiwan in 2017. He is currently working for the Global Learning and Assessment Development, Greater China in China. His research interests include big data, intelligent systems, and internet applications.
He graduated from Far East University, Tainan, Taiwan in 2017. He is currently working for the Global Learning and Assessment Development, Greater China in China. His research interests include big data, intelligent systems, and internet applications.
Prof. Evgeni Magid
 He is currently working as a Head of Intelligent Robotics Department and a founder, a Professor and the Head of Intelligent Robotic Systems Laboratory at Kazan Federal University. He received his PhD degree from University of Tsukuba, Japan in 2011. His research interests include fuzzy systems, intelligent systems, and technical and vocational education.
He is currently working as a Head of Intelligent Robotics Department and a founder, a Professor and the Head of Intelligent Robotic Systems Laboratory at Kazan Federal University. He received his PhD degree from University of Tsukuba, Japan in 2011. His research interests include fuzzy systems, intelligent systems, and technical and vocational education.
REFERENCES
Cite this article
TY - JOUR AU - Kuo-Hsien Hsia AU - Jia-Hong Cai AU - Shu-Li Pai AU - Evgeni Magid PY - 2019 DA - 2019/03/30 TI - Control System for Maintaining Safe Following Distance while Driving JO - Journal of Robotics, Networking and Artificial Life SP - 261 EP - 264 VL - 5 IS - 4 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.190220.012 DO - 10.2991/jrnal.k.190220.012 ID - Hsia2019 ER -