
Inverse Scattering Transform and Solitons for Square Matrix Nonlinear Schrödinger Equations with Mixed Sign Reductions and Nonzero Boundary Conditions
- DOI
- 10.1080/14029251.2020.1683996How to use a DOI?
- Keywords
- Inverse scattering transform; nonlinear waves; solitons; nonlinear Schrödinger systems
- Abstract
The inverse scattering transform (IST) with nonzero boundary conditions at infinity is developed for a class of 2 × 2 matrix nonlinear Schrödinger-type systems whose reductions include two equations that model certain hyperfine spin F = 1 spinor Bose-Einstein condensates, and two novel equations that were recently shown to be integrable, and that have applications in nonlinear optics and four-component fermionic condensates. In our formulation, both the direct and the inverse problems are posed in terms of a suitable uniformization variable which allows us to develop the IST on the standard complex plane instead of a two-sheeted Riemann surface or the cut plane with discontinuities along the cuts. Analyticity, symmetries and asymptotics of the scattering eigenfunctions and scattering data are derived, and properties of the discrete spectrum are analyzed in detail. In addition, the general behavior of the soliton solutions for all four reductions is discussed, and some novel soliton solutions are presented.
- Copyright
- © 2020 The Authors. Published by Atlantis and Taylor & Francis
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. Introduction
In the last two decades there has been an increased focus in the study of multicomponent Bose-Einstein condensates (BECs) within the field of atomic and nonlinear wave physics, with a particular emphasis on spinor condensates, i.e., systems whose atoms are in a single hyperfine state but possess internal spin degrees of freedom. Various multicomponent ultracold gases and condensates have been realized experimentally using optical trapping techniques [21].
Spinor BECs formed by atoms with spin F are characterized by a macroscopic wave function with 2F + 1 components, and are associated with various phenomena not present in single-component BECs, such as formation of spin domains, spin textures and topological states. Various types of solitary wave structures (solitons) were first predicted to occur and then observed in focusing and defocusing spinor BECs. These include gap (bright) solitons and dark solitons in optical lattices, polar-core spin vortices, topological states, and topological Wigner crystals of half-solitons. We refer the inquisitive reader to [19, 22, 36] for more details on the experimental examination of spinor BECs.
Many theoretical works have dealt with multicomponent vector solitons in F = 1 spinor BECs, which are characterized by 3-component macroscopic wave functions. In particular, a completely integrable model for homogeneous one-dimensional spin-1 BECs (i.e., a cigar-shaped spin-1 BEC in the absence of external magnetic fields) was proposed by Wadati et al. in [15], and subsequently extended and generalized in [7,10–12,16,24,33,40,41] to also include both attractive and repulsive inter-atomic interactions, spin F = 2 condensates, as well as a finite, nonzero background. The generalization to a nonzero background is particularly important for both kinds of nonlinearity (attractive or repulsive), since in this context the BEC can exhibit domain wall solutions [20, 29], dark-bright soliton complexes [3, 18, 27, 28, 30, 43], and in the attractive/focusing case also rogue wave solutions [24, 35].
In [39] Tsuchida showed that the matrix NLS in [15] remains integrable under more general reductions for the matrix potential, and in [34] the Inverse Scattering Transform (IST) was developed for this class of matrix nonlinear Schrödinger type systems, defined as
Case 1 - Defocusing (Σ = I2, Ω = I2):
Case 2 - Focusing (Σ = I2, Ω = −I2):
Case 3 - mixed signs (Σ = σ3, Ω = σ3):
Case 4 - mixed signs (Σ = σ3, Ω = −σ3):
Cases 1 and 2 with nonzero boundary conditions have been considered in various previous works [16, 33, 40], whereas cases 3 and 4 with nonzero boundary conditions are novel. In this work, we will cover all four cases, showing that the results for cases 1 and 2 can be recovered as a byproduct.
It is worth pointing out that cases 3 and 4 correspond to a “mixed sign” case for coupled NLS systems where the nonlinearity in the norm is of Minkowski-type instead of the Euclidean-type norm that appears in cases 1 and 2. Soliton solutions for the mixed sign vector NLS have been found with both zero and nonzero boundary conditions in [9,17,31,38,42]. In the two-component case, the “mixed sign” NLS models the dynamics of vector solitons in waveguide arrays. The “mixed sign” two-component coupled NLS can also be used to model a series of drops of a binary BEC trapped in an optical lattice. However, the matrix coupled situation is different. The signs of the coupling constants now correspond to s-wave scattering lengths accounting for interspecies and intraspecies atomic interactions of the condensates. Therefore, unlike cases 1 and 2, the PDEs in cases 3 and 4 cannot physically model three-component F = 1 BECs. Nevertheless, they can model two classes of physical problems, nonlinear optics and four-component fermionic condensates. The interested reader can find more details in references [13, 14, 34] concerning cases 3 and 4 in the context of nonlinear optics. We refer the reader to references [25, 34] for more information regarding cases 3 and 4 in the context of four-component fermionic condensates.
In the following, the matrix potential Q(x, t) is chosen to be a symmetric matrix:
Note that we could have also considered the off-diagonal entries to be q0(x, t) and −q0(x, t), but by performing a change of variables on each diagonal component, i.e. qj → −qj for j = ±1, one can easily check that the same equations as in the symmetric case are recovered. Note also that if one is interested in four-component fermionic condensates, Q(x, t) is not necessarily symmetric, and the corresponding results can be obtained by disregarding the second symmetry (see Sec. 2.4).
In order for the system (1.1) to allow for constant nonzero boundary conditions as x → ±∞, one can perform a simple gauge transformation
Assuming that for constant NZBC the derivative terms iQt and Qxx also vanish in the limit x → ±∞, the following constraints are imposed on the NZBC:
The paper is organized as follows. Section 2 covers the direct scattering problem for Eq. (1.7). In Section 3 we develop the inverse scattering problem for the eigenfunctions as a Riemann-Hilbert problem (RHP) with poles. We solve the RHP in the case of simple poles and reconstruct the potential in terms of the eigenfunctions and scattering data. In Section 4 we focus on reflectionless potentials, i.e. pure soliton solutions and include several plots to illustrate the distinguished features of the various solutions. In Section 5 we provide some concluding remarks.
2. Direct Scattering
2.1. Lax Pair, Riemann Surface and Uniformization Coordinate
The MNLS equation (1.7) for a 2 × 2 potential matrix Q(x, t) can be recovered as the compatibility condition (ϕxt = ϕtx) of the Lax pair:
It is useful to note for future reference that
Taking into account the boundary conditions (1.8), asymptotically the scattering problem becomes
It is useful to note that there is an equivalent 4 × 4 constraint to the 2 × 2 constraint (1.9) on the NZBC (1.8)
The eigenvalues of U± are
For cases 1 and 3, let us introduce
Similarly for cases 2 and 4, we introduce
We will follow the same strategy as in [4, 6, 8, 32] by introducing a uniformization variable
Using these definitions of z, k and λ, we observe that in cases 1 and 3, the branch cuts of both copies of the complex plane are mapped onto the real z-axis. The first Riemann sheet ℂI is mapped onto the upper half of the complex z-plane and the second Riemann sheet ℂII is mapped onto the lower half plane of the complex z-plane. A neighborhood of k = ∞ on both sheets is mapped onto either a neighborhood of z = 0 or z = ∞ depending on the sign of Imk (cf. Fig. 1).
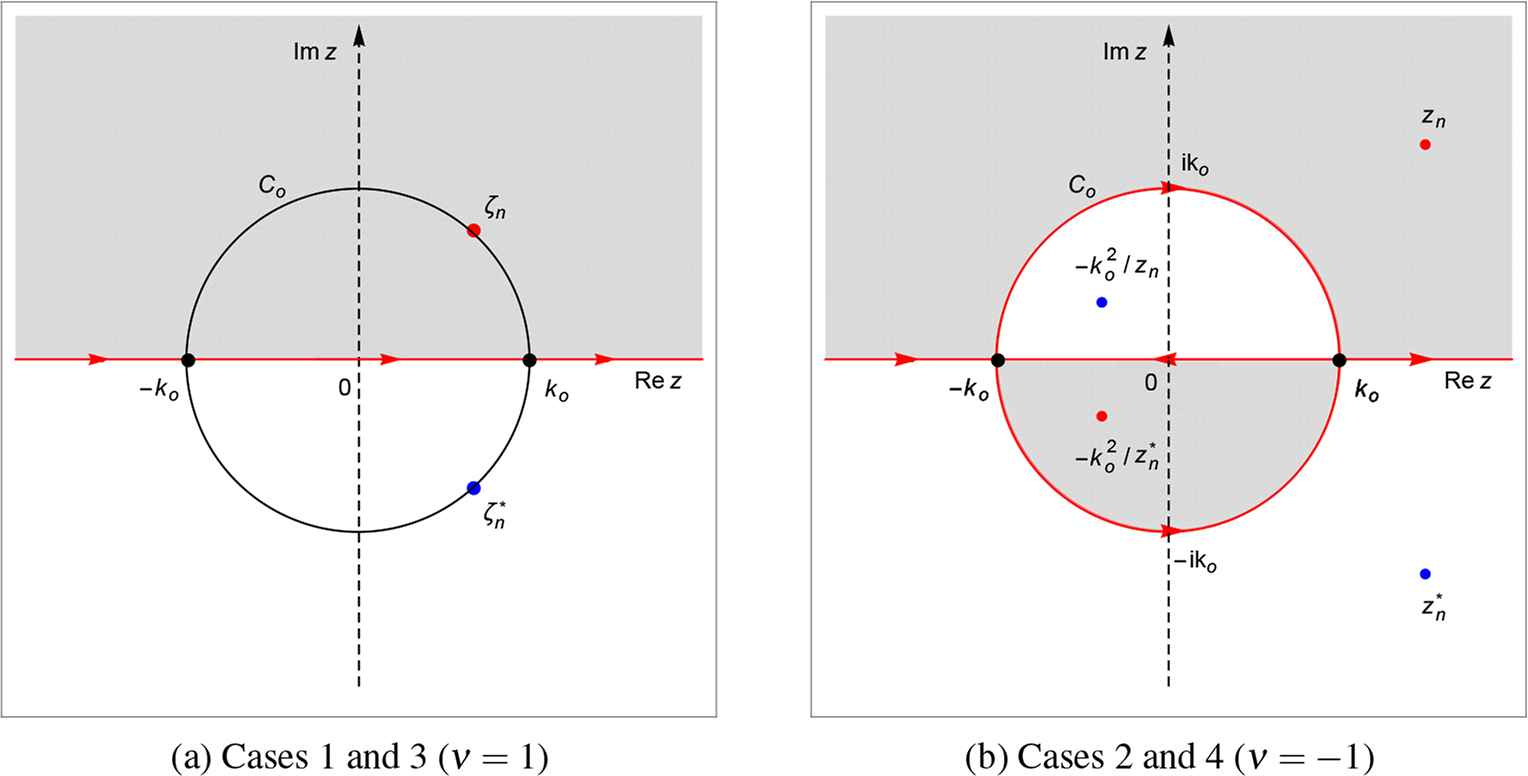
Left/Right: The complex z-plane, showing the regions D± where Imλ > 0 (gray) and Imλ < 0 (white), respectively. Also shown in the figures are the oriented contours for the Riemann-Hilbert problem (red), and the symmetries of the discrete spectrum of the scattering problem.
In cases 2 and 4, we observe that the branch cut on both Riemann sheets is mapped onto the circle C0 centered at z = 0 with radius k0 in the complex z-plane, i.e.
The first Riemann sheet ℂI is mapped onto the exterior of C0, and the second Riemann sheet ℂII is mapped onto the interior of C0. Moreover, z(∞I) = ∞ and z(∞II) = 0, where ∞I signifies that k → ∞ on ℂI, and ∞II denotes that k → ∞ on ℂII (cf. Fig. 1).
Consequently, for cases 1 and 3, Imλ > 0 corresponds to the region D− in the z-plane, and Imλ < 0 corresponds to the region D− in the z-plane, where
Similarly, for cases 2 and 4, Imλ > 0 corresponds to D+ and Imλ < 0 corresponds to D− such that
The regions D+ and D− are represented in Figure 1, where D+ is depicted as the gray region and D− is depicted as the white region. For cases 1 and 3, we observe that D+ is the UHP of the z-plane and D− is the LHP of the z-plane. For cases 2 and 4, we observe that the region D+ includes the exterior of C0 in the upper-half z-plane and the interior of C0 in the lower-half z-plane. Conversely, the region D− includes the interior of C0 in the upper-half z-plane and the exterior of C0 in the lower-half z-plane.
We will show in the next section that the sign of Imλ determines the region of analyticity of the Jost eigenfunctions. From now on, it will be more convenient to express all k dependence as z dependence where appropriate.
2.2. Jost Solutions and Analyticity
The Jost solutions are defined as the asymptotic eigenvector solutions of the asymptotic scattering problem (2.4). We can write the asymptotic eigenvector matrix as
We observe that
We will now consider the time dependence of the eigenfunctions. The time evolution of the eigenfunctions is dictated by the second equation in (2.1), which asymptotically as x → ±∞ yields ϕt = V±ϕ with
We then define the Jost solutions as the
As usual, the continuous spectrum of the scattering problem corresponds to values of (k, λ), or, equivalently, z, such that the all four eigenfunctions above are bounded for all x ∈ ℝ, which requires λ(k) ∈ ℝ. Correspondingly, we denote the continuous spectrum in k as Σk = ℝ \ [−k0, k0] for cases 1 and 3 (ν = 1), and Σk = ℝ ∪ i(−k0, k0) for cases 2 and 4 (ν = −1). In the z-plane, the continuous spectrum is Σz = ℝ for ν = 1 and Σz = ℝ ∪ C0 for ν = −1.
It is convenient to define modified eigenfunctions related to these Jost solutions (2.20a), (2.20b) that have simpler asymptotic behavior as x → ±∞:
Following the same strategy as in [4], one can express the modified eigenfunctions M,
2.3. Scattering Coefficients
Using Jacobi’s formula, we conclude that any solution ϕ(x, t, z) of (2.1) satisfies ∂x(detϕ) = ∂t(detϕ) = 0 since U and V are traceless. Then it follows from (2.24a) and (2.24b) that
Therefore, for all
We observe that the matrices X±(z) are singular at the branch points
Lastly, for z ∈ Σ0, (2.23a), (2.23b), and (2.27) imply that
2.4. Symmetries
When an initial-value problem (IVP) is solved using IST, symmetries in the potential lead to symmetries in the Jost solutions, which lead to symmetries in the scattering data. In the case of zero boundary conditions (ZBC), there are two symmetries in the scattering data that follow the symmetries in the potential: (i) R = ΣQ†Ω; and (ii) Q = QT. With respect to the uniformization variable z, R = ΣQ†Ω corresponds to z → z* ⇔ (k, λ) → (k*, λ*), which we will refer to as the first symmetry (conjugation symmetry on same sheet). The fact that the potential is assumed to be symmetric, i.e. Q = QT, will be referred to as the third symmetry (transpose symmetry).
In the case of NZBC, things are a little more complicated since λ(k) changes sign from one Riemann sheet to another, namely λII(k) = −λI(k). In terms of the uniformization variable, this corresponds to
2.4.1. First Symmetry: (k, λ) → (k*λ*)
Let us introduce for z ∈ Σz the bilinear combinations
Since Φ and Ψ are both solutions of the scattering problem in (2.1), it can be easily verified that fx = ft = gx = gt = 0, i.e. f, g are independent of x and t. If we evaluate limx→±∞ f(x, t, z) and limx→±∞ g(x, t, z), we obtain the following relations:
We can then solve (2.26) to obtain:
We will use the following notation to denote the 2 × 2 blocks of the eigenfunction matrices Φ and Ψ:
We can then write the relation (2.35) in terms of each 2 × 2 block:
It follows from the analog of Theorem 2.4 in [33] that γ(z)S(z) with γ(z) defined in (2.18a) is continuous for all z ∈ Σz, including the branch points. However, as stated earlier, the 2×2 scattering coefficients a(z), ā(z), b(z),
If we examine the 2 × 2 blocks of (2.33), we find the following conjugation symmetries for Φ(z):
The relation (2.33) also implies that:
If we then consider Eq. (2.42) block by block, we find the corresponding conjugation symmetries for the scattering coefficients:
The reflection coefficients (2.30) then satisfy the conjugation symmetry
It follows from (2.42) that
The analogues of (2.28a) and (2.28b) for Ψ(x, t, z) = Φ(x, t, z)S−1(z) are
Taking into account (2.48a) and (2.48b) we finally obtain the following relations:
2.4.2. Second Symmetry: (k, λ) → (k, −λ)
As mentioned above, the second symmetry relates values of eigenfunctions and scattering data from one Riemann sheet to the other. In terms of the uniformization variable:
If we take into account that
Explicitly, each 4 × 2 column satisfies
Moreover, from (2.26) and (2.53) it follows that for all z ∈ Σz:
Finally, the above relations imply the corresponding symmetries for the reflection coefficients:
Even though the symmetries (2.57a) and (2.57b) are only valid for z ∈ Σz, whenever the specific columns and scattering coefficients involved are analytic, they can be extended to the appropriate regions of the z-plane using the Schwarz reflection principle. We also note that in cases 2 and 4, even the symmetries of the non-analytic scattering coefficients involve the map z → z*. This is because unlike what happens in cases 1 and 3, the continuous spectrum is not just a subset of the real z-axis.
2.4.3. Third Symmetry: Q → QT
The third symmetry follows from the fact that we assume the potential Q(x, t) to be a symmetric matrix. We observe the following equivalent relation in terms of
Proceeding similarly as in the first symmetry, we define
One can verify that
In terms of the 2 × 2 blocks the above symmetry reads:
The first two relations imply that
Finally, if we combine this result with (2.47a), (2.47b), (2.47c) and (2.47d) we get
2.5. Discrete Spectrum and Residue Conditions
The discrete spectrum is the set of all values z ∈ ℂ \ Σz where the scattering problem allows eigenfunctions in L2(ℝ). We will show below that these values are the zeros of deta(z) in D+ and the zeros of detā(z) in D−. In general, one cannot exclude the possibility of spectral singularities, i.e., zeros that occur on the continuous spectrum Σz. This is a highly nontrivial issue even in the case of zero boundary conditions (see [44]), and to the best of our knowledge no result is currently available in the literature regarding the location of spectral singularities (or sufficient constraints on the potential for their absence) in the case of nonzero boundary conditions. In the following we will assume that deta(z) ≠ 0 and detā(z) ≠ 0 for all z ∈ Σz.
If deta(z) = 0 at a discrete eigenvalue z = zn then the eigenfunctions φ(x, t, zn) and ψ(x, t, zn) become linearly dependent, which can be expressed in general as:
Suppose that deta(z) has a finite number N of zeros z1,...,zN in D+ ∩ {z ∈ ℂ : Im > 0}. That is, let deta(zn) = 0 for n = 1,...,N. Taking into account the symmetries we have that
For each n,...,N we therefore have a quartet of discrete eigenvalues, which means that the discrete spectrum is given by the set
Let us follow the strategy in [34] and define
We observe that P(x, t, z) is analytic in D+ and
2.5.1. Norming Constants and Residue Conditions when rankP(x, t, zn) = 3
We first consider the case where zn ∈ D+ is a simple zero of deta(z) with (deta)′(zn) ≠ 0, where the prime denotes differentiation with respect to z, and rankP(x, t, zn) = 3. Then the first symmetry implies that
Then from (2.74) it follows that
Following a similar strategy for
Since in this case, we are assuming kerP(x, t, zn) is one-dimensional (because rankP(x, t, zn) = 3), then the two columns of the matrix multiplying P(x, t, zn) in (2.80) must be proportional to each other, which then implies rankcn = 1. Also, considering that α(z) = a−1(z)/deta(z) if zn is a simple zero of deta(z), we have
Then using (2.80), φ(x, t, z) = e−iθ(x,t,z)M(x, t, z), ψ(x, t, z) = eiθ(x,t,z)N(x, t, z) and a−1(z) = α(z)/deta(z) we get
Defining Cn = cn/(deta)′(zn) we can express (2.83) as follows:
Our next task will be to determine the residue conditions and the symmetry in the norming constants for any two eigenvalues in each quartet that are related by the second symmetry. It is helpful to introduce the following notation:
Using (2.54a), (2.87a) and (2.86b) we have on one hand
Comparing these two results we obtain
Similarly, using (2.54b), (2.87a), (2.86a) and (2.81) we obtain
Furthermore, differentiating (2.56a) with respect to z and evaluating at
Assuming that deta(ẑn) has a simple pole, then
2.5.2. Norming Constants and Residue Conditions when rankP(x,t,zn) = 2
We now consider
However, a(zn) = α(zn) = 02×2, which implies that Cn = 0. This means that if rankP(x, t, zn) = 2, no nontrivial norming constant exists for a simple pole of deta(zn). We now must assume that deta(zn) has at least a double pole, so that (deta)′(zn) = 0. If deta(z) has a second order zero at zn, in a neighborhood of zn we can write a−1(z) as
If rankP(x, t, zn) = 3, then α(zn) ≠ 02×2, which implies that τn,2 ≠ 02×2 and detτn,2 = 0 because detα(zn) = 0. On the other hand τn,1 may or may not be zero, and it is possible to have detτn,1 ≠ 0. However, if rankP(x, t, zn) = 2, this implies that α(zn) = τn,2 = 02×2, which means that even though deta(z) has a double zero at zn, a−1(z) only has a simple zero at zn. Furthermore, since α(zn) = 0, we conclude that
We are then able to calculate the following residue conditions:
In order to establish the symmetries in the norming constants that relate eigenvalues paired by the second symmetry, we proceed as in the case when rankP(x, t, zn) = 3. The proportionality conditions for the eigenfunctions at ẑn and
Using (2.54a) and (2.101b) we have on one hand
Comparing these two results we obtain:
Similarly, from (2.54a), (2.54b), (2.101a) and (2.71) it follows that
Moreover, differentiating (2.56a) with respect to z twice and evaluating at
Combining these relations we then have
Using (2.104), (2.105), (2.106a), (2.106b) and (2.107), we recover the same symmetry relations for Ĉn and
We note that
2.6. Asymptotics as z → 0 and z → ∞
The asymptotic behaviors of the eigenfunctions and the scattering data are necessary to properly formulate the inverse problem. Furthermore, the next-to-leading-order behavior of the eigenfunctions will allow us to reconstruct the potential from the solution of the Riemann-Hilbert problem for the eigenfunctions.
We note that the limit as k → ∞ corresponds to z → ∞ in ℂI and to z → 0 in ℂII, and both limits will be needed. The asymptotic expansion of the eigenfunctions in terms of z can be obtained via standard WKB expansions. The modified eigenfunctions
Similarly, asymptotics as z → 0 in the proper region D± yields:
The above equations will allow us to reconstruct the potential Q(x, t) from the solution of the inverse problem for the eigenfunctions.
Lastly, inserting the above asymptotic expansions for the Jost eigenfunctions into (2.26), we show that as z → ∞ in the appropriate analytic regions of the complex z-plane,
The asymptotics above hold with Imz ≥ 0 and Imz ≥ 0 for a(z) and ā(z), respectively, and with z ∈ Σz for b(z) and
3. Inverse Scattering Problem
The inverse problem amounts to constructing a map from the scattering data back to the potential Q(x, t). The scattering data include the reflection coefficients ρ(z),
3.1. Riemann-Hilbert Problem
As outlined above, we begin the formulation of the inverse problem with (2.29a), which we now consider to be a relation between eigenfunctions analytic in D+ and those analytic in D−. Then we introduce the sectionally meromorphic matrices
Equations (3.1), (3.2) and (3.3) define a matrix, multiplicative, homogeneous Riemann-Hilbert problem (RHP). To complete the formulation of the RHP we need a normalization condition, which in this case is the asymptotic behavior of μ± as z → ∞. Using the asymptotic behavior of the Jost eigenfunctions and scattering coefficients, it is easy to verify that
On the other hand,
To solve the RHP, we need to regularize it by subtracting out the asymptotic behavior and the pole contributions from a−1(z) and ā−1(z), which are assumed to have a finite number of simple poles in the appropriate regions of analyticity and off Σz. We recall that discrete eigenvalues come in quartets. It is convenient to define ζn = zn for n = 1,...,N and
The above identities allow us to express (2.29a) as
Similarly, subtracting the asymptotic behaviors and simple poles from (2.113a) and applying the P+ projector gives
3.2. Residue Conditions and Reconstruction Formula
Equations (3.11) and (3.12) are integral equations for z ∈ D± which also depend on the residues of Ma−1 and
Similarly, we can solve (3.12) for N
Now we must reconstruct the potential from the solution of the RHP. From (2.113c), we have the asymptotic behavior of the upper 2 × 2 block of N(x, t, z) as z → ∞:
Then if we look at only the upper 2 × 2 blocks of (3.14) we obtain
Evaluating (3.15) and (3.16) at z = ζn and comparing allows to reconstruct the potential Q(x, t) as
Similarly, we can recover R(x, t) using the lower 2×2 block of
We note that the time dependence of the solution has already been taken into account since the Jost eigenfunctions are simultaneously solutions of both parts of the Lax pair.
The above reconstruction formulas allow us to prove the first and third symmetries for the norming constants that we claimed earlier. If we take the Hermitian conjugate of (3.17), solve (3.18) for Q† and compare, we conclude that
3.3. Reflectionless Potentials
We are interested in potentials Q(x, t) where the reflection coefficient ρ(z) is identically zero for z ∈ Σz, which implies that
From (3.21) we observe that we only need
Substituting (3.22b) into (3.22a) we have
We observe that even though discrete eigenvalues appear in quartets, the reflectionless potential Q(x, t) can be reconstructed using only 2N terms, where N is the number of discrete eigenvalues.
4. Soliton Solutions
We will now derive the one-soliton solutions for all four cases of the matrix NLS equation with nonzero boundary conditions by assuming there exists only one quartet of discrete eigenvalues z1, ẑ1,
The entries of the norming constant C1 are
There is a rich family of soliton solutions with nonzero boundary conditions in cases 1 and 2, defocusing and focusing MNLS, respectively, as shown in [16, 24, 33 , 40]. In cases 3 and 4, we also observe many novel types of soliton solutions, whose behaviors depend on the location of the discrete eigenvalues as well as on the rank of the associated norming constants. Following standard terminology, solitons with a rank one norming constant will be referred to as “ferromagnetic” solitons”, and solitons with a full rank norming constant will be called “polar” solitons. In the following, we will limit our discussion to the novel soliton solutions obtained for cases 3 and 4. It is worth noticing that while the focusing and defocusing MNLS are invariant under arbitrary unitary transformations (see [24, 33]), the mixed sign equations that correspond to cases 3 and 4 are not. As a consequence, one cannot obtain a general classification of one-soliton solutions based on the Schur form of the associated norming constant like in [24]. Moreover, unlike the focusing and defocusing cases, where the soliton solution is regular for any choice of the norming constants, in the mixed sign cases 3 and 4 suitable constraints on the norming constants are required in order to obtain regular solutions. This is similar to what happens in the case of zero boundary conditions. Specifically, the regularity condition to be imposed is that det(A − FD−1C) = det(D −CA−1F) ≠ 0 for all x, t ∈ ℝ, so that the inverse matrices that appear in the reconstruction of the eigenfunctions (4.2) are well-defined. In the case of zero boundary conditions, the explicit expression of the one soliton solution is simple enough that the regularity condition can be written explicitly in terms of the norming constants (see [34]). Here, however, the solution is much more complicated due to the fact that even a single soliton solution has a quartet of associated discrete eigenvalues, and an explicit condition on the norming constants that guarantees the soliton solution is regular in cases 3 and 4 is presently not available. The large number of explicit solutions we have considered seem to suggest that the same constraints on the norming constants that guarantee regularity in the case of zero boundary conditions also work when nonzero boundary conditions are considered, but we plan to address this issue rigorously in a future work. Below we show some plots and discuss the features of some of the regular soliton solutions obtained from the reconstruction formula (4.1) in cases 3 and 4. The asymptotic analysis of the soliton solutions, and the soliton interactions are also deferred to future work.
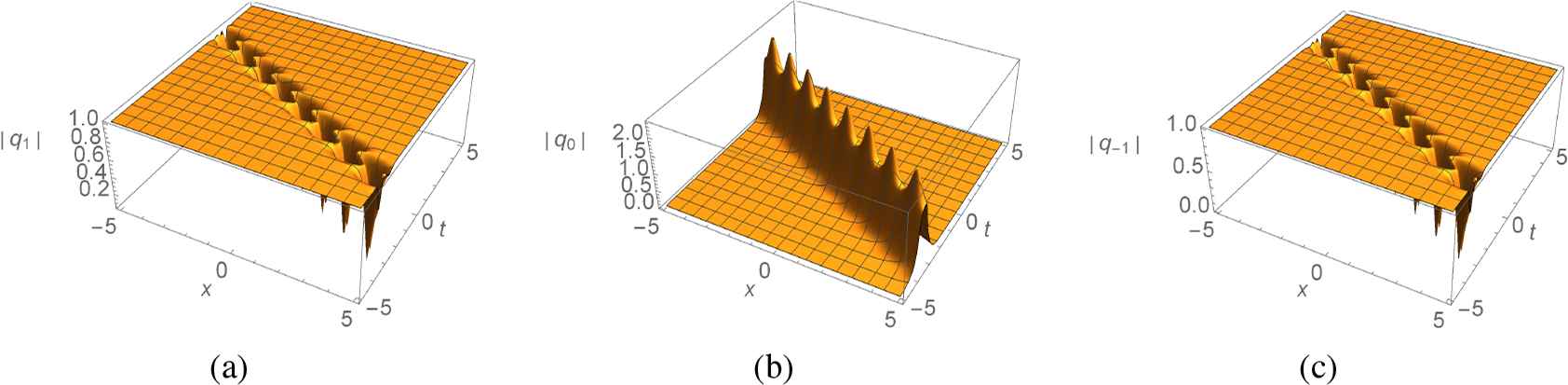
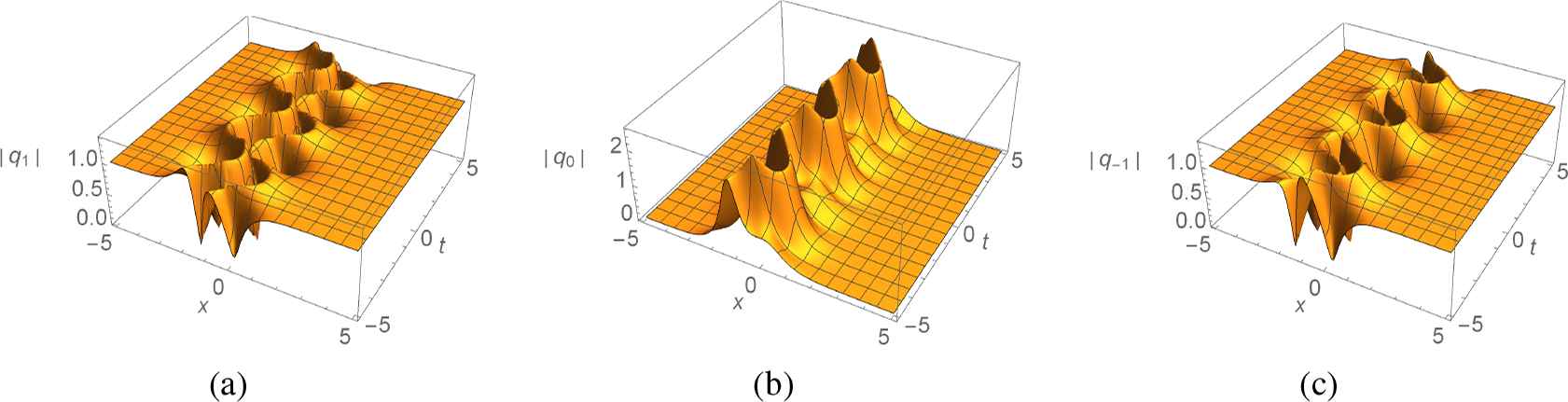
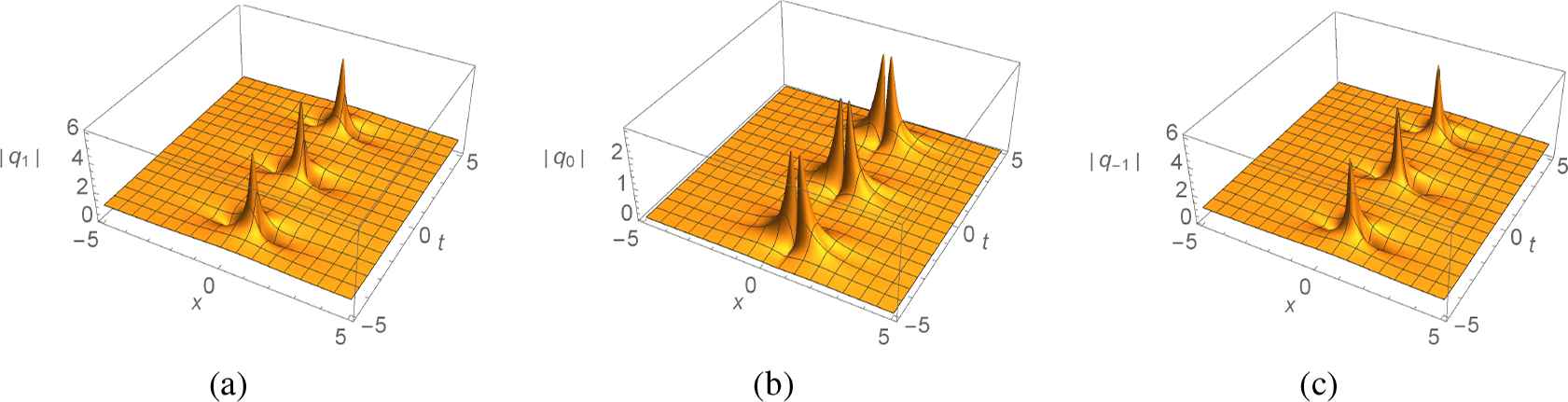
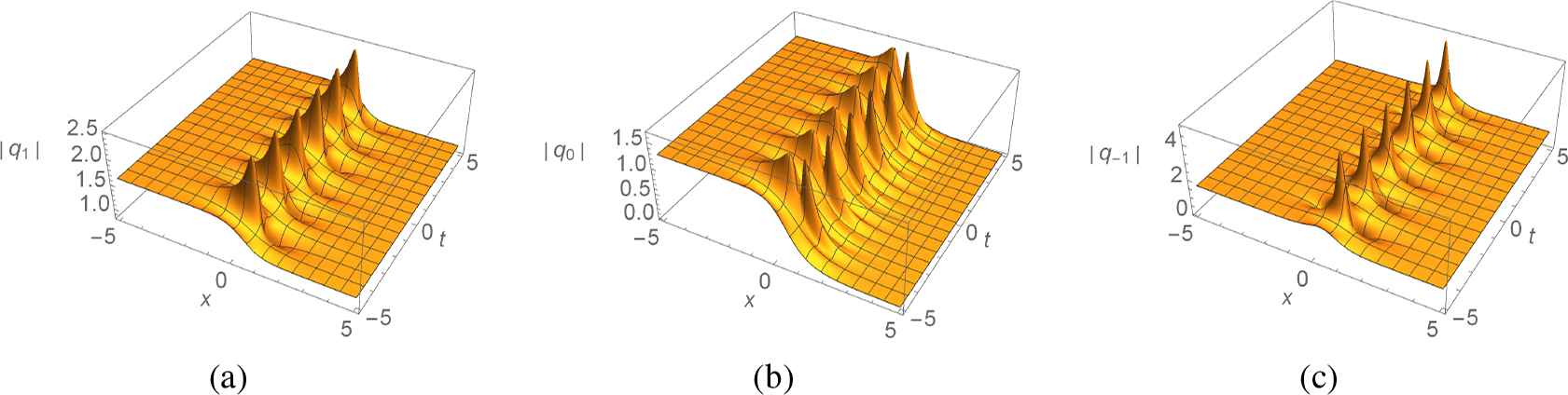
In case 3 it appears that the soliton solutions are regular only for full rank norming constants (detC1 ≠ 0), in analogy to what happens with zero boundary conditions [34]. In other words, no regular ferromagnetic solitons exist in case 3. Here we find dark solitons in the diagonal components of the potential and bright soliton solutions in the off-diagonal component. For a general discrete eigenvalue as in Fig. 2, we observe the spinor analog of Tajiri-Watanabe type solutions [4, 37]. For a pure imaginary discrete eigenvalue as in Fig. 3, we observe the analog of Kuznetsov-Ma breather solutions [4,23,26] that are periodic in t and homoclinic in x. For a discrete eigenvalue on the circle C0 as in Fig. 4, we observe solutions that behave like simple (non-oscillating) dark-bright solitons.
Case 3 (ν = 1), three components (q1, q0 and q−1 from left to right) with Q+ = I2, z1 = 1+2i, and norming constant entries c1 = 0, c0 = 1/2 + i, c−1 = 0 (detC1 ≠ 0)
Case 3 (ν = 1), three components (q1, q0 and q−1 from left to right) with Q+ = I2, z1 = 3i/2, and norming constant entries c1 = i, c0 = 2, c−1 = 3i/2 (detC1 ≠ 0)
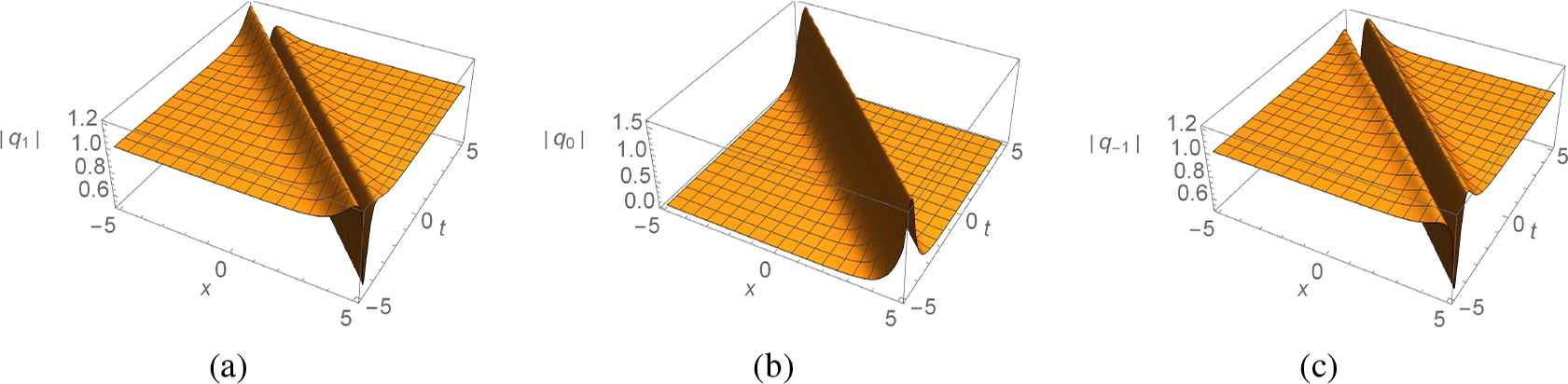
Case 3 (ν = 1), three components (q1, q0 and q−1 from left to right) with Q+ = I2,
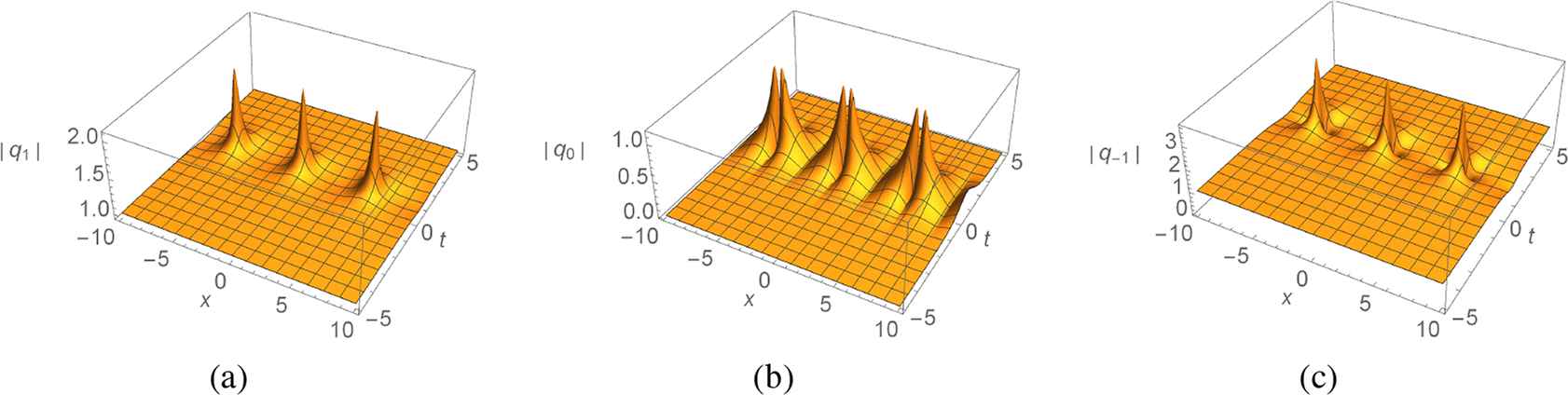
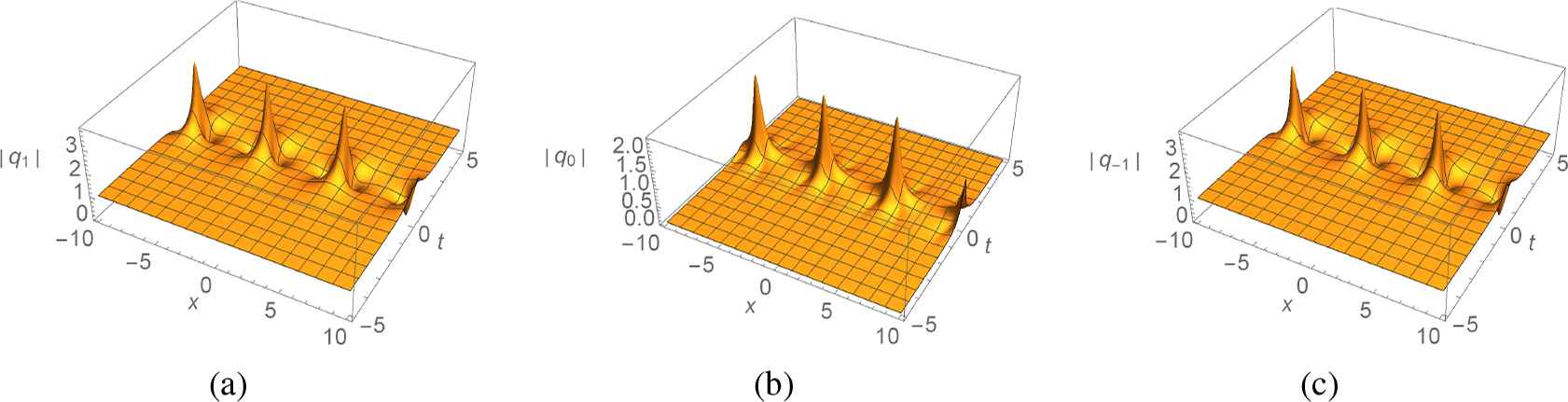
In case 4, we find regular soliton solutions both for norming constants C1 with detC1 = 0 and with detC1 ≠ 0. In general, when detC1 = 0, a shift in the norm of the background between Q− and Q+ is observed, i.e., domain-wall type solutions appear; on the contrary, when detC1 ≠ 0, the background has the same asymptotic norm at +∞ and −∞. For a general discrete eigenvalue as in Fig. 5, we observe the analog of Tajiri-Watanabe type solutions. For a pure imaginary discrete eigenvalue as in Fig. 6 and Fig. 8, we observe the analog of Kuznetsov-Ma breather solutions that are periodic in t. For discrete eigenvalues on the circle C0 as in Fig. 7 and Fig. 9, we observe the analog of Akhmediev breather solutions [2, 4] that are periodic in x and homoclinic in t.

Case 4 (ν = −1), three components (q1, q0 and q−1 from left to right) with Q+ = I2, z1 = 1 + 2i, and norming constant entries c1 = 1, c0 = 2, c−1 = 4 (detC1 = 0)
Case 4 (ν = −1), three components (q1, q0 and q−1 from left to right) with Q+ = I2, z1 = 3i/2, and norming constant entries c1 = 3i/2, c0 = 1/2, c−1 = 2i (detC1 ≠ 0)
Case 4 (ν = −1), three components (q1, q0 and q−1 from left to right) with Q+ = I2, z1 = 2i, and norming constant entries c1 = 1, c0 = 2, c−1 = 4 (detC1 = 0)
Case 4 (ν = −1), three components (q1, q0 and q−1 from left to right) with Q+ = I2,
Case 4 (ν = −1), three components (q1, q0 and q−1 from left to right) with Q+ = I2,
5. Conclusion
In this work, we have developed the IST with nonzero boundary conditions for a class of matrix NLS equations whose reductions include the defocusing/focusing MNLS (cases 1 and 2), which have applications in three-component BECs, and two novel cases 3 and 4, which have applications in nonlinear optics and four-component fermionic condensates. We have provided a rigorous definition of norming constants that does not use unjustified analytic extensions of the scattering relations. We have properly accounted for all three symmetries in the potential matrix and the corresponding symmetries in the norming constants. The novel cases 3 and 4 present additional challenges in that, unlike cases 1 and 2, certain constraints are required on the norming constant in order to obtain regular soliton solutions. The large number of explicit solutions we have considered seem to suggest that the same constraints on the norming constants that guarantee regularity in the case of zero boundary conditions also work when nonzero boundary conditions are considered, but we plan to address this issue rigorously in a future work. The asymptotic analysis of the soliton solutions, and the soliton interactions are also deferred to future work.
Cases 3 and 4 are worth investigating in the context of multicolor optical spatiotemporal solitary waves created by interaction of light at a central frequency with two sideband waves both through cross-phase modulation and parametric four-wave mixing of opposite signs. On the other hand, the four-component spinor system could have applications in the recently discovered phenomenon of superconductivity in bilayer graphene [5].
Acknowledgments
AKO gratefully acknowledges support for this work from the UCCS graduate school under the Mentored Doctoral Fellowship grant. AKO and BP also thankfully acknowledge support from the National Science Foundation under grant DMS-1614601.
References
Cite this article
TY - JOUR AU - Alyssa K. Ortiz AU - Barbara Prinari PY - 2019 DA - 2019/10/25 TI - Inverse Scattering Transform and Solitons for Square Matrix Nonlinear Schrödinger Equations with Mixed Sign Reductions and Nonzero Boundary Conditions JO - Journal of Nonlinear Mathematical Physics SP - 130 EP - 161 VL - 27 IS - 1 SN - 1776-0852 UR - https://doi.org/10.1080/14029251.2020.1683996 DO - 10.1080/14029251.2020.1683996 ID - Ortiz2019 ER -