
Uncertain Random Optimization Models Based on System Reliability
 , Yuanguo Zhu*,
, Yuanguo Zhu*, - DOI
- 10.2991/ijcis.d.200915.002How to use a DOI?
- Keywords
- Optimization model; Chance theory; Belief reliability; Hard failure; Soft failure; Jet pipe servo valve
- Abstract
The reliability of a dynamic system is not constant under uncertain random environments due to the interaction of internal and external factors. The existing researches have shown that some complex systems may suffer from dependent failure processes which arising from hard failure and soft failure. In this paper, we will study the reliability of a dynamic system where the hard failure is caused by random shocks which are driven by a compound Poisson process, and soft failure occurs when total degradation processes, including uncertain degradation process and abrupt degradation shifts caused by shocks, reach a predetermined critical value. Two types of uncertain random optimization models are proposed to improve system reliability where belief reliability index is defined by chance distribution. Then the uncertain random optimization models are transformed into their equivalent deterministic forms on the basis of
- Copyright
- © 2020 The Authors. Published by Atlantis Press B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Reliability serves as one of vital essential characteristics of the system, which represents the capability of the system to carry out required functions. System reliability will be affected by several factors which can be divided into internal factors (wear, corrosion, fatigue, etc.) and external abrupt factors (impact, stress, etc.), which also known as degradation processes and shocks. Generally, the system failure caused by degradation processes is called soft failure. At a certain moment, the system suddenly fails due to accidental shocks, which is called hard failure.
In the traditional reliability assessment, a great quantity of literatures considered that the system failure is caused by soft failure or hard failure. Since 1990s, degradation process modeling has been used to analyze the reliability and statistical characteristics of the system [1–3]. There are also extensive researches on the modeling of shocks for the system suffered from hard failure [4–6]. However, most systems may be subject to hard failure and soft failure simultaneously due to exposure to degradation processes and external shocks. A system reliability model under the competing failure of extreme shock and internal degradation was proposed by Ye et al. [7]. Wang et al. [8] presented a competing failure model where the degradation rate is increased by shocks. Jiang et al. [9] proposed a reliability model for the systems subject to multiple s-dependent competing failure processes with a shifting failure threshold.
Scholars used to believe that only on the basis of enough failure data can we better select the reasonable metrics. However, traditional reliability assessment based on probability theory may be hindered by failure data which are difficult to acquire within a short time. Liu [10] pioneered uncertain reliability analysis of a dynamic system based on uncertainty theory with few failure data. Uncertainty theory associated with the experts' belief degrees was put forward by Liu [11] when there is no enough data to get a frequency distribution that an event will happen. Liu [12] also proposed the definition of uncertain process which is different from random process. Zeng et al. [13] put up reliability indexes which can evaluate product's reliability refer to uncertainty theory. Zeng et al. [14] also put up a minimal cut set-based numerical evaluation method to compute the system reliability index expressed by uncertain measure.
When there is a complicated system with a mixture of uncertainty and randomness, chance theory was put forward by Liu [15]. Liu [16] also proposed an optimization method to convert an uncertain random problem which is not easy to be solved into its deterministic form. After that, Wen and Kang [17] proposed a reliability assessment method in which reliability index was defined as chance distribution. Additionally, belief reliability metrics which are concerned with uncertain random variables were defined by Zhang et al. [18]. Some essential formulas were put forward by Gao and Yao [19] to calculate important indexes of common discrete uncertain random systems. Liu et al. [20] carried out the reliability analysis for uncertain random systems with independent degradation processes and shocks.
There are some research on the reliability optimization of uncertain random systems. Peng et al. [21] presented a new method to optimize the reliability of composite laminates taking into account uncertain parameters. A multi-objective optimization model to maximize the reliability of assembly line was proposed by Li et al. [22] under uncertain random environments. Optimization of maintenance policies which is severed as an critical role in reliability engineering has attracted much attention. Caballé et al. [23] proposed a preventive strategy applicable to the system based on reliability analysis. An optimal scheduling of inspection maintenance and replacement can optimize the system reliability considering the operational cost. Niwas and Garg [24] raised an approach to analyze system reliability and profit based on warranty policy. Chen and Li [25] determined an optimal replacement policy for minimizing the cost of the deteriorating system which is suffering random shocks and degradation processes. We will optimize the reliability of uncertain random systems motivated by these literature of system maintenance policy.
The system in this paper suffers from two dependent failure processes which may be modeled as uncertain degradation process and random shocks. The random shocks may also generate additional degradation shifts which may be driven by an uncertain renewal reward process. The competing failure models with extreme shock and cumulative shock are proposed respectively under uncertain random environment. This paper proposes a strategy of optimal allocation of maintenance resources to optimize the system reliability. The optimal maintenance strategy will be obtained to maximize the system reliability considering the different damage of degradation processes and shocks on system reliability. The system cost can also be saved by adjusting the proportion of maintenance resources.
The sections of this paper are listed below. Section 2 reviews some concepts involved in uncertainty theory. In Section 3, two types of uncertain random optimization system models are proposed, where reliability index is defined by chance distribution. The related algorithms of models are also discussed. In Section 4, the proposed models are verified by a numerical example. Section 5 summarizes this paper in a brief conclusion. Besides, for better comprehension of the article, some mathematical symbols used in the sequel are listed in the following notation.
Notation
| Threshold value of soft failure | |
| Threshold value of hard failure | |
| Intensity of shocks | |
| Total shock times by time |
|
| Total degradation shift times by time |
|
| Magnitude of the |
|
| for |
|
| Probability distribution of |
|
| Magnitude of the |
|
| shift for |
|
| Interarrival time between |
|
| degradation shift for |
|
| Degradation process | |
| Wiener process | |
| Uncertainty distribution of |
|
| Uncertainty distribution of |
|
| Initial degradation value for the uncertain process | |
| Reliability index of extreme shock model | |
| Reliability index of cumulative shock model |
2. PRELIMINARY
Let
Theorem 1.
(Liu [26]) Let
Definition 1.
(Yao and Chen [27]) Let
Let
Theorem 2.
(Liu [15]) Let
3. SYSTEM RELIABILITY
Suppose that the system in this paper suffers from two dependent failures which are hard failure and soft failure, where either of failure processes can lead to system failures. Randomness and uncertainty exist simultaneously when analyzing the reliability of the system.
3.1. Hard Failure
Generally, a two-dimensional random vector sequence
Poisson process is a typical mathematical model of the counting process. Intuitively, the counting process of random events may be modeled as Poisson process as long as they occur independently in disjoint intervals and only once in sufficiently small intervals. External shocks approximately satisfy the above conditions in system reliability engineering. Thus,
3.1.1. Extreme shock model
In extreme shock model, the damage of shocks on the system is independent. Hard failure occurs when the size of any shock is beyond a specified threshold level
3.1.2. Cumulative shock model
It is assumed that the damage of shocks on the system is accumulated in cumulative shock model. The system will fail if the total magnitudes of accumulated shocks exceed a critical value
Suppose
3.2. Soft Failure
There is not enough failure data due to the limitation of time and cost in reliability assessment. Therefore, the traditional random process model is no longer applicable. The degradation may be evaluated by experts' experiment data based on uncertainty theory. Theoretically, it is appropriate to describe wear degradation with Liu process. The wear degradation
It follows from Definition 1 that the solution
The physical structure of the system may be damaged by external shock loads which can generate degradation shifts accumulated instantaneously when random shocks arrive. Since a large amount of data is not easy to derive in reliability assessment, it is more reasonable that degradation shifts are considered as an uncertain process.
Assume that the magnitude of the
Thus, the entire degradation is the sum of wear degradation process and degradation shifts. Soft failure occurs when the entire degradation processes reach a predetermined critical value
How to define a reliability index to measure reliability of complex systems is vital important in reliability engineering. Considering above two dependent failures, the reliability index may be regarded as belief reliability distribution. It is hopeful that uncertain degradation processes will not exceed the critical value
Definition 2.
Assume that a system suffers from dependent soft failure and hard failure. Then the chance distribution of extreme shock model, i.e.,
Definition 3.
Assume that a system suffers from dependent soft failure and hard failure. Then the chance distribution of cumulative shock model, i.e.,
4. UNCERTAIN RANDOM OPTIMIZATION MODEL OF RELIABILITY
We are to optimize the reliability of a system by control variables which can be shown as regular inspections, maintenance funds, etc. Assume that
4.1. Optimization Model of Extreme Shock
In order to get the decision with the maximum reliability index satisfying a set of constraints, the maximum belief reliability index optimization model of extreme shock can be presented as
It is a nature approach to transform the model (10) to an equivalent problem which may be easy to be solved.
Remark 2.
Compared with existing uncertain random systems in [15,16,28], the reliability index in proposed models is also defined by chance distribution. For the continuous system subject to competing failure processes, the models in [17] suffer from the independent degradation process and shocks. In contrast, the advantages of our model in this paper are mainly reflected in the following:
The system failure is subject to dependent competing failure processes which are uncertain wear degradation process and random shocks;
The dependence of the wear degradation process and shocks is that random shocks may accelerate wear degradation process by degradation shifts which are driven by an uncertain renewal reward process;
The proposed uncertain random constrained model may be transformed into a nonlinear constrained programming problem by uncertainty theory;
The system reliability is optimized by optimal allocation ratio of maintenance resources considering the different damage of degradation processes and shocks on system reliability.
Theorem 3.
Let
Proof
Obviously,
Part I: Since the degradation shifts follow from an uncertain renewal reward process, we can get
On the one hand, the uncertain distribution of
One the other hand, it follows from (5) that
Referring to operational laws of uncertain variables, the inverse uncertainty distribution of
We have
Part II: The random shock follows from the compound Poisson process, we can obtain
Since
As mentioned above,
When
And then
Thus we can derive
4.2. Algorithm for Extreme Shock Optimization Model
The optimization model with extreme shock may be converted into it's equivalent problem by Theorem 3, then the problem becomes a typical nonlinear constrained programming problem. The penalty function algorithm with conjugate gradient method for nonlinear programming problems with inequality constraints is adopted in this section.
Algorithm 1:
Penalty function algorithm for (11)
Fix a time
Construct a new function
For initial value
by Euler method.If
If
Compute
Compute the step length
If
If
Compute
Carry out a new round of iteration from
If
4.3. Optimization Model of Cumulative Shock
Referring to extreme shock optimization model, we are to present a maximum reliability index optimization model with cumulative shock which can be described as
Theorem 4.
Let
Proof
The proof is similar to that of Theorem 3.
4.4. Algorithm for Cumulative Shock Optimization Model
Algorithm 1 may be utilized to obtain the optimal solutions of cumulative shock optimization problem. The difference between two models (11) and (13) is that they have different terms
Algorithm 2:
Monte Carlo simulation for
Set the initial value
Generate numbers
Compute
If
If
5. NUMERICAL EXPERIMENT
The jet pipe servo valve is a representative two-stage electro hydraulic flow valve of EHSVs in modern industrial control systems, which can realize the servo control of mechanical equipments. In the following, we will analyze and optimize the reliability of jet pipe servo valve based on proposed models.
5.1. Proposed Model Description
The study indicates that the main cause of system failures is the fluid deterioration which would cause clamping stagnation and tribological wear between the spool and the sleeve. The clamping stagnation can cause additional wear debris, which would both affect the reliability of the system.
The clamping stagnation is considered as hard failure which is driven by a compound Poisson process with intensity
The tribological wear is driven by an uncertain process
5.2. Traditional Model Description
The traditional reliability evaluation is modeled based on probability theory in which all the variables
Remark 2.
In the numerical experiments, we choose the mostly common probability distribution functions which conform to the physical characteristics of the system according to the reference [30]. The uncertain distribution functions are given based on the experience of experts. Of course, other continuous distribution functions may also be applied. Since the model proposed in this paper is continuous, we have not adopted the discrete distribution function for the time being. In the future, we will carry out the reliability optimization of discrete-time systems to further improve the research of system reliability.
5.3. Results and Analysis Figure 1
In Figure 1,
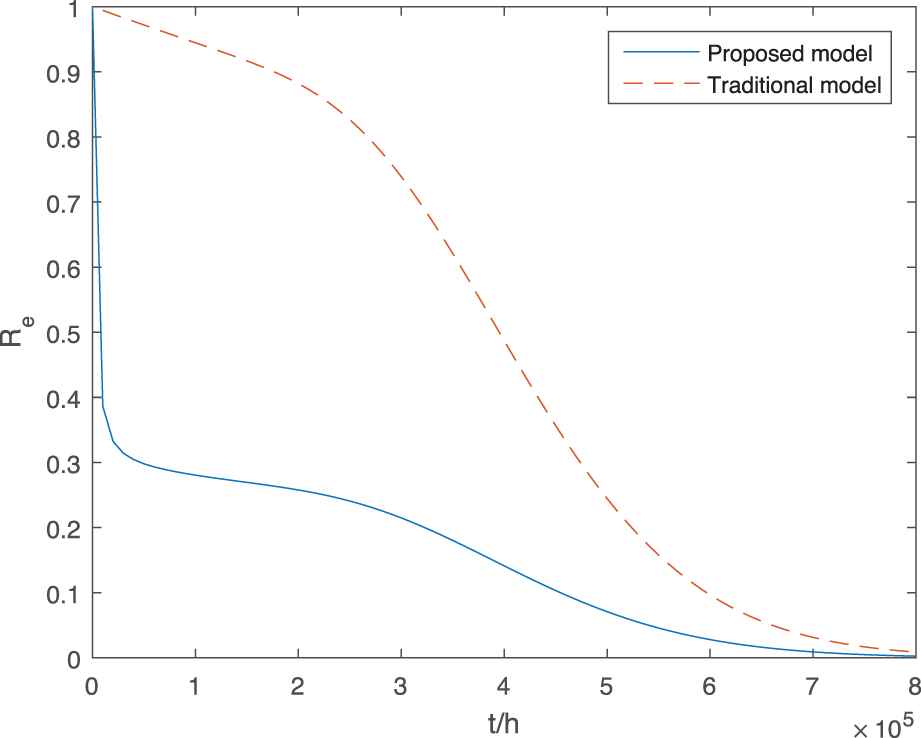
Original index of extreme shock model.
In Figure 2,
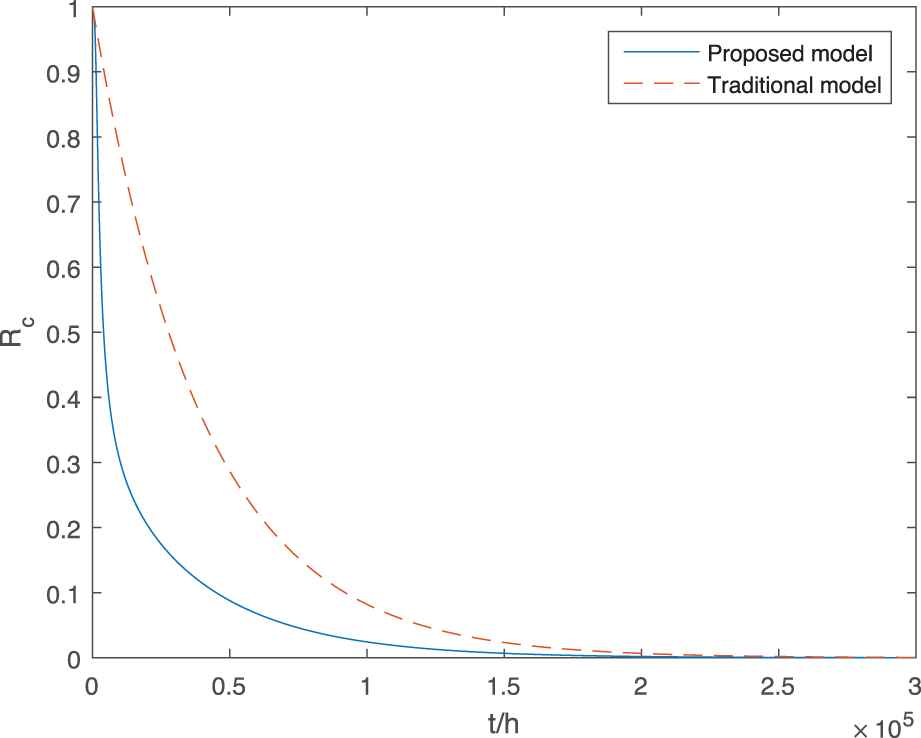
Original index of cumulative shock model.
The experimental data show that evaluation models proposed in this paper are relatively conservative when traditional evaluation models tend to overestimate the system reliability. The internal degradation that may not be quantified as random events due to the lack of failure data, while we may regard them as uncertain events according to experts' experience. If the degradation processes are regarded as random events, the reliability of the system will be overestimated, which will lead to the wrong configuration of maintenance strategy, causing system failure, greatly shortening the system life, and causing economic losses.
The two uncertain random optimization models have been transformed into the nonlinear constrained programming problems by Theorems 3 and 4, respectively. There are lots of software that may be used to solve such typical optimization problems. In this paper, the mathematical software MATLAB is selected to obtain the optimal solutions based on above algorithms.
Then, we select
Optimal solutions and original index of extreme shock model.
Optimal solutions and original index of cumulative shock model.
From these
It can also be easily observed that the optimal reliability indexes of two models are always greater than their original indexes when time
The data also show that the maintain fund on tribological wear is increasing when time
We may conclude that optimal maintenance allocation can improve the system reliability and delay the decay rate of system reliability from the above numerical experimental results. In addition, it may be seen from the optimal solutions that the clamping stagnation is the main failure process in initial time of system operation. And with the gradual accumulation of wear debris, tribological wear becomes the main failure process of the system. This shows that the damage of clamping stagnation and tribological wear on system reliability is variable in different periods. Thus, it is necessary to adjust the proportion of maintenance allocation to maximize the system reliability.
6. CONCLUSION
In this paper, we present a type of shock-degradation dependence of the uncertain random system where random shocks can accelerate wear degradation process by additional degradation shifts. The wear degradation process is driven by an uncertain process, random shocks are driven by a compound Poisson process, degradation shifts are modeled as an uncertain renew reward process. Then, two optimization reliability index models are introduced and algorithms of models are also proposed. Finally, a numerical example about a jet pipe servo valve is given to illustrate the obtained results. Furthermore, the existing research can be extended to an interdependent competing failure model where the degradation processes and shocks can accelerate each other.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
AUTHORS' CONTRIBUTIONS
All authors have the same contributions to prepare the manuscript.
ACKNOWLEDGMENTS
This work is supported by the National Natural Science Foundation of China (Grant No. 61673011).
REFERENCES
Cite this article
TY - JOUR AU - Qinqin Xu AU - Yuanguo Zhu PY - 2020 DA - 2020/09/24 TI - Uncertain Random Optimization Models Based on System Reliability JO - International Journal of Computational Intelligence Systems SP - 1498 EP - 1506 VL - 13 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.d.200915.002 DO - 10.2991/ijcis.d.200915.002 ID - Xu2020 ER -