
Snake Robot Controlled by Biomimetic CPGs
- DOI
- 10.2991/jrnal.k.190220.010How to use a DOI?
- Keywords
- Snake robot; CPG; biomimetic; spiking neural network; locomotion
- Abstract
The design of biomimetic robot is one popular research. To achieve this goal, the reproduction of animal locomotion is mandatory. Animal locomotion is created by the activities of Central Pattern Generator (CPG). CPGs are neural networks capable of producing rhythmic patterned outputs without rhythmic sensory or central input. We propose a network of several biomimetic CPGs using biomimetic neuron model and synaptic plasticity. This network is implemented on a field programmable gate array. We designed one unsupervised snake robot using this network of CPG. It is composed of one head wagon followed by seven slave wagons. Infrared sensors are also embedded in the head wagon. This robot can reproduce the locomotion of one snake.
- Copyright
- © 2019 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
The design of biomimetic robot is one popular research. To achieve this goal, the reproduction of animal locomotion is mandatory. Animal locomotion is created by the activities of Central Pattern Generator (CPG) that produces alternating bursts [1]. Most rhythmic movements are programmed by CPG networks [2]. CPGs are neural networks capable of producing rhythmic patterned outputs without sensory input. CPGs in animal locomotion have been studied such as swimming in salamander [3] or lamprey [4], and heartbeat system in leech [5,6].
Usually in robotic field, CPGs are designed using simple neuron models [7] or simple oscillators [8], which are not biological time scales and which are considered as bio-inspired systems rather than biomimetic systems. These models provide sinusoidal oscillations and cannot reproduce biomimetic CPGs which have variability in performance. As our aim is to replicate biological behavior, we developed biomimetic CPGs using digital neuromorphic system.
2. BIOMIMETIC CPGS IN DIGITAL NEUROMORPHIC SYSTEM
2.1. CPG Neural Network
The biomimetic CPG is based on the neural network system that controls the heartbeat of a leech [6]. This simple network uses eight excitatory neurons with 12 inhibitory synapses, making it an ideal candidate for our applications. This neural network model has been designed by Hill et al. [6] and described in Figure 1.
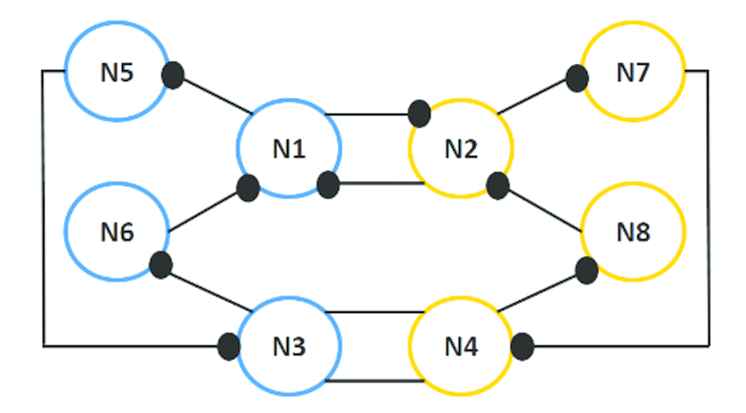
Diagram of the Segmental Oscillator of the Heartbeat of the Leech. The modelling is from Hill et al. [6]. N1–N2 and N3–N4 are two elemental oscillators. N1, N3, N5, and N6 are controlling the left part (blue), N2, N4, N7, and N8, the right part (orange). The 12 black dots represents inhibitory synapses with short-term plasticity. All neurons are excitatory ones.
2.2. Simplification of the Model
To design this CPG (Figure 1), Hill’s neural network diagram [6] was used.
The network designed by Hill uses the Hodgkin–Huxley (HH) model [9] and complex equations for synapses. Our first work was to simplify this model by applying Izhikevich neurons [10] instead of HH model. Using the short-term synaptic plasticity [11] and the Izhikevich Regular Spiking neurons, the activity of Hill’s model was reproduced.
Even though the model was simplified, the same behavior and characteristics as the biological CPGs was successfully reproduced. The important point is to allow a variability in the characteristics of the CPGs. Percentages of variability can be controlled by adjusting the parameters of short-term synaptic plasticity.
By changing the parameters of the inhibitory synapses, it is possible to obtain different periods and cyclic ratios. This is very important especially for closed-loop experiments and to reproduce locomotion activities for robotics. A single parameter pair manages the modification of the period and of the duty cycle. The possible period interval in seconds is quite wide [0.3 and 35 s].
2.3. Implementation in Digital Neuromorphic System
Biomimetic CPGs [12–15] are implemented in a digital platform: CMOD A7-A35 Xilinx Artix-7 Field Programmable Gate Array (FPGA). The neural network implementation architecture operates on a single computation core. This real-time digital system requires few resources and low power consumption [16–19]. Table 1 summarizes the stated resources and Figure 2 describes two CPGs with different periods.
| Kintex-7 | Utilization | Available | Percentage |
|---|---|---|---|
| LUT | 7786 | 20,800 | 37.43 |
| FF | 3299 | 41,600 | 7.93 |
| BRAM | 50 | 50 | 100 |
| DSP | 40 | 90 | 44.44 |
Utilization of the resources for the implementation of biomimetic CPGs in CMOD A7-A35 board
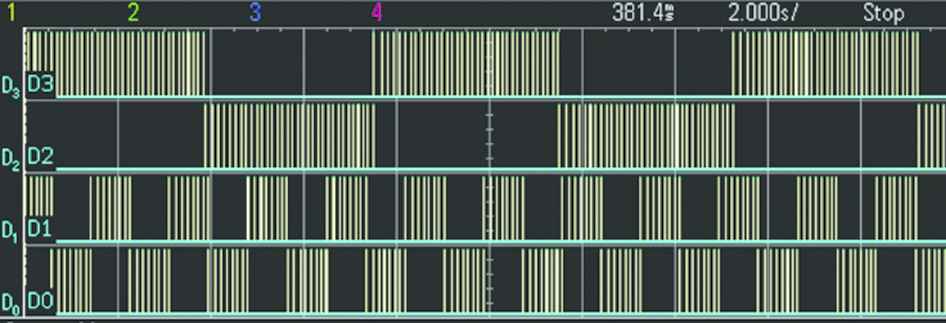
Two different CPGs with different period (1.8 and 7.8 s). The output are from the scope.
As we implemented the biomimetic CPGs in the FPGA board, we design the structure of the snake robot which embedded the FPGA board.
3. SNAKE ROBOT
3.1. Design
The snake robots is composed of seven wagons (like spinal cord) and one locomotive (mimics the brain).
Biomimetic CPGs will control the different motors of the wagons. As the output of the FPGA board is 3.3 V with low current, a power driver for the motors and a VHDL module for converting the CPGs to Pulse Width Modulation (PWM) to control motor speed needs to be added. The PWM frequency should be between 100 Hz and 200 kHz. The duty cycle of the PWM controls the speed of the motor. Pololu_DRV8835 was used for the power driver. Motors are DG01D with a 0.8 kg.cm couple and a no load speed of 90 rpm. Figure 3 shows the 3D structure of the wagons.
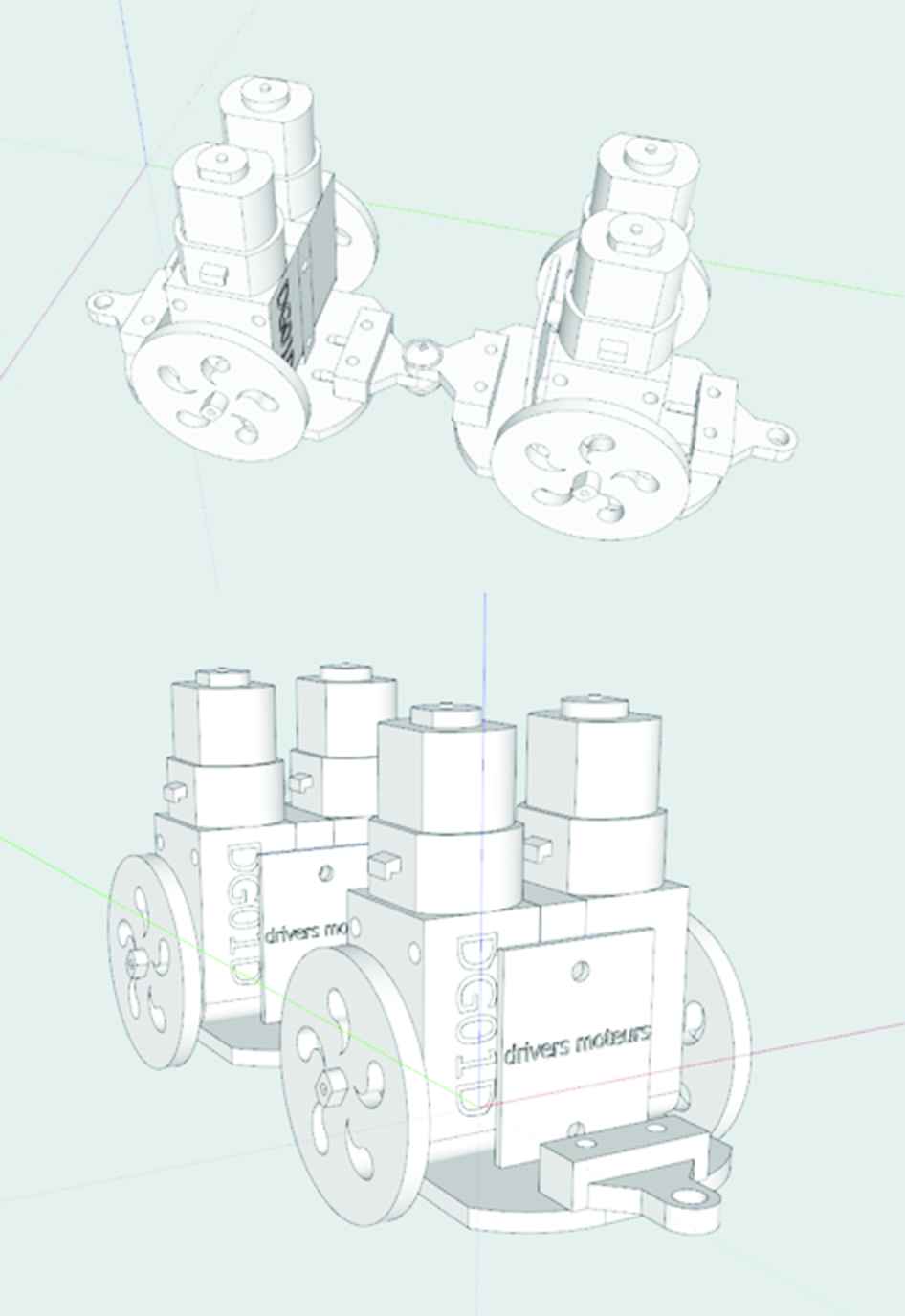
3D view of the wagon design.
All the distance between the different wagons and the possible movement angle can be tuned with mechanical structure. Figure 4 shows how the tuning is possible with the orange screws.

The orange screw allows the tuning of distance of the different wagons but also the angle for the movement.
The design of electrical connection and components for the locomotive and for the wagon is described in Figure 5.
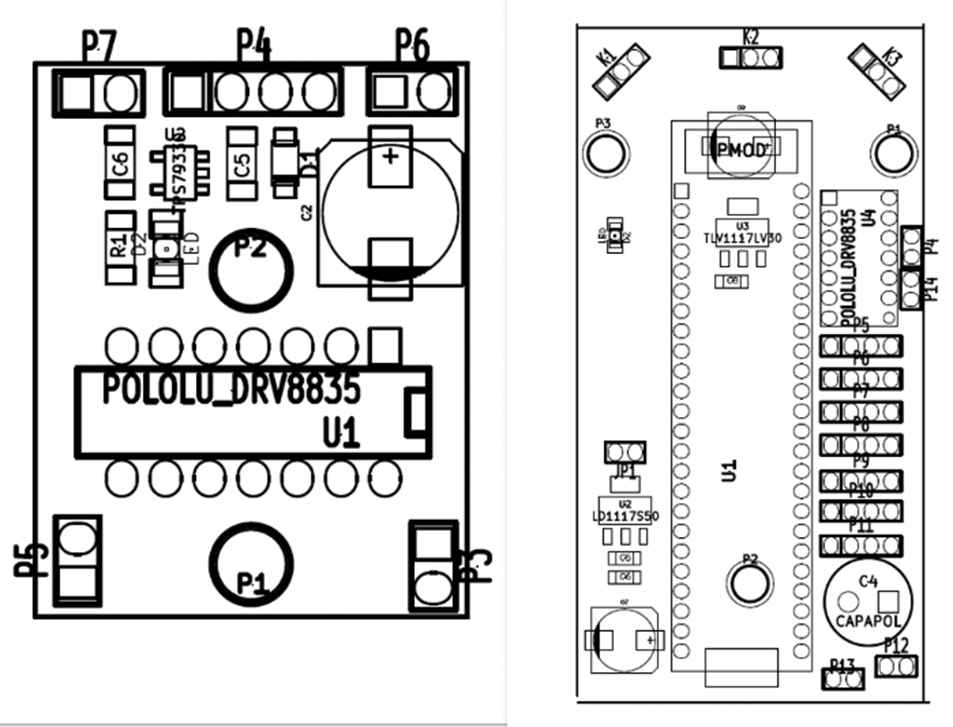
On the left, the electrical circuit of the wagon. On the right, the electrical circuit of the locomotive with the FPGA board.
The locomotive system has three IR sensors for detecting the different obstacles and then send stimulus to CPGs for modifying duty cycle and period. The tuning of the duty cycle allows the movement and the tuning of period allows the speed or the stop of the robot.
4. RESULTS
Height CPGs were implemented (one for the locomotive and seven for the wagons). Enable input are connected to each wagon to choose which ones are working for simulating a lesion of the spinal cord. The CPGs are connected for allowing forward locomotion like we can find in animal locomotion [20]. Figure 6 describes this CPG network and the forward locomotion [19].
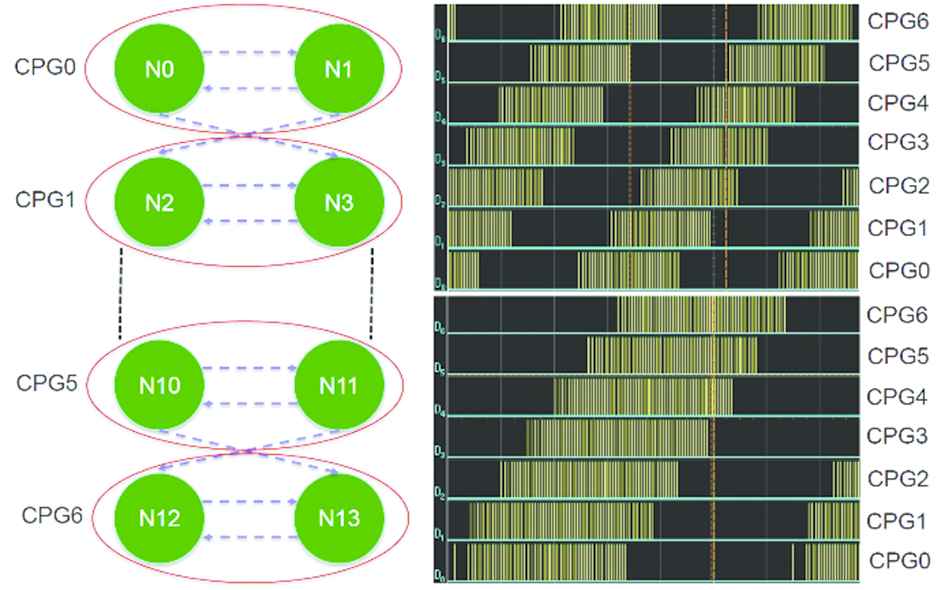
Forward locomotion [19] with two examples of speed using a chain of 7 CPGs for the seven wagons. Time axis is 1 s by division. Signal are the left neuron (N0, N2, N4, N6, N8, N10 and N12) of each CPG.
The final snake robot is 59 cm long and works with real-time biomimetic CPGs and mimics the snake locomotion. Figure 7 shows the final snake robot picture.

Picture of the snake robot with the locomotive and the seven wagons.
5. CONCLUSION
This article describes the design of a snake robot. This robot is controlled by real-time network of biomimetic CPGs. This system can be used in robotic applications [21] for a closer behavior to biological animals. It can also be used in bio-hybrid robotics (biomimetic CPGs can be replaced by in vitro cell culture). We previously showed that our system can be connected to biological neurons [22,23]. Another advantage is that the real-time systems can simulate multiple CPG topologies and simulate different hypothesis and protocol treatments for biomedical applications such as spinal cord injury [24] and neuroprosthetics [25,26].
ACKNOWLEDGMENT
Authors thank Social Cooperation Program for Brain-Morphic AI to Resolve Social Issues, IIS, University of Tokyo.
Authors Introduction
Mr. Damien Blanchard
 He obtained a 2-year technical degree in electronical engineering and computer sciences at Bordeaux Institute of Technology in 2007. From 2008 to today, he is working as electronical designer at IUT Bordeaux at Univ. of Bordeaux, France.
He obtained a 2-year technical degree in electronical engineering and computer sciences at Bordeaux Institute of Technology in 2007. From 2008 to today, he is working as electronical designer at IUT Bordeaux at Univ. of Bordeaux, France.
Dr. Timothée Levi
 He received the PhD degree in Electronics at Univ. of Bordeaux in 2007. From October 2009 to today, he is an Associate Professor at IMS lab., Univ. Of Bordeaux, France. During this period, from September 2013 to August 2015, he was a Visiting Research Fellow at University of Tokyo, Japan. From April 2017, He is Project Associate Professor at The University of Tokyo. His research interest deals with neuromorphic engineering which aims at designing and using integrated circuits which components and architecture are neuro-mimetic for bio-hybrid experiments.
He received the PhD degree in Electronics at Univ. of Bordeaux in 2007. From October 2009 to today, he is an Associate Professor at IMS lab., Univ. Of Bordeaux, France. During this period, from September 2013 to August 2015, he was a Visiting Research Fellow at University of Tokyo, Japan. From April 2017, He is Project Associate Professor at The University of Tokyo. His research interest deals with neuromorphic engineering which aims at designing and using integrated circuits which components and architecture are neuro-mimetic for bio-hybrid experiments.
Prof. Kazuyuki Aihara
 He received a B.E. degree in electrical engineering and PhD degree in electronic engineering from the University of Tokyo, Japan, in 1977 and 1982, respectively. He led the ERATO (Exploratory Research for Advanced Technology) Aihara Complexity Modelling project by JST (Japan Science and Technology Agency) from 2003 to 2008 and the FIRST Innovative Mathematical Modelling project by JSPS (Japan Society for the Promotion of Science) through the FIRST (Funding Program for World-Leading Innovative R&D Science and Technology) program from 2010 to 2014 by CSTP (Council for Science and Technology Policy). He is studying mathematical theory for modelling complex systems and its wide-ranging transdisciplinary applications in science and technology from the viewpoint of mathematical engineering and chaos engineering. On the applications side, he is working to bridge neuroscientific and clinical studies and next-generation AI by mathematical modeling and analyses of brain dynamics to realize neurointelligence.
He received a B.E. degree in electrical engineering and PhD degree in electronic engineering from the University of Tokyo, Japan, in 1977 and 1982, respectively. He led the ERATO (Exploratory Research for Advanced Technology) Aihara Complexity Modelling project by JST (Japan Science and Technology Agency) from 2003 to 2008 and the FIRST Innovative Mathematical Modelling project by JSPS (Japan Society for the Promotion of Science) through the FIRST (Funding Program for World-Leading Innovative R&D Science and Technology) program from 2010 to 2014 by CSTP (Council for Science and Technology Policy). He is studying mathematical theory for modelling complex systems and its wide-ranging transdisciplinary applications in science and technology from the viewpoint of mathematical engineering and chaos engineering. On the applications side, he is working to bridge neuroscientific and clinical studies and next-generation AI by mathematical modeling and analyses of brain dynamics to realize neurointelligence.
REFERENCES
Cite this article
TY - JOUR AU - Damien Blanchard AU - Kazuyuki Aihara AU - Timothée Levi PY - 2019 DA - 2019/03/30 TI - Snake Robot Controlled by Biomimetic CPGs JO - Journal of Robotics, Networking and Artificial Life SP - 253 EP - 256 VL - 5 IS - 4 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.190220.010 DO - 10.2991/jrnal.k.190220.010 ID - Blanchard2019 ER -