In this article, we focus on the inverse scattering transformation for the Fokas–Lenells (FL) equation with nonzero boundary conditions via the Riemann–Hilbert (RH) approach. Based on the Lax pair of the FL equation, the analyticity, symmetry and asymptotic behavior of the Jost solutions and scattering matrix are discussed in detail. With these results, we further present a generalized RH problem, from which a reconstruction formula between the solution of the FL equation and the Riemann–Hilbert problem is obtained. The N-soliton solutions of the FL equation is obtained by solving the RH problem.
with ν = ±1 is a significant mathematical and physical model for the optical fibers, deep water waves and plasma physics [3]. The NLS equation is a completely integrable system which admits Lax pair and bi-Hamiltonian formulation [21,22].
In the late 70s, standard bi-Hamiltonian formulation was used to obtain an integrable generalization of a given equation [7]. For instance, the Camassa–Holm equation is derived from the KdV equation via the bi-Hamiltonian structure [6], and the same mathematical trick can be applied to the NLS equation yields Fokas–Lenells (FL) equation [8]
where α, β > 0. In this paper, we consider the focusing case with σ = −1.
In recent years, much work has been done on the FL equation (1.3). For example, Lax pair for FL equation was obtained via the bi-Hamiltonian structure by Fokas and Lenells [8]. They further considered the initial-boundary problem for the FL equation (1.3) on the half-line by using the Fokas unified method [9]. The dressing method is applied to obtain an explicit formula for bright-soliton and dark soliton solutions for Eq. (1.3) [11,15]. The bilinear method was used to obtain bright and dark soliton solution are obtained [12,13]. The Darboux transformation is used to obtain rogue waves of the FL equation [10,19]. The Deift–Zhou nonlinear steepest decedent method was used to analyze long-time asymptotic behavior for FL equation with decaying initial value [18]. Riemann–Hilbert (RH) approach was adopted to construct explicit soliton solutions under zero boundary conditions [1]. As far as we know, the soliton solutions for the FL equation (1.3) with Nonzero Boundary Conditions (NZBCs) have not been reported. In this paper, we apply RH approach to study the inverse transformation of the FL equation (1.3) with the following NZBCs
u(x,t)∼q±e-iβx+2iαβt,x→±∞,(1.4)
where
|q±|=2β
and assume that u(x, t) − q± ∈ L1(R±); with respect to x for all t ≥ 0. In next section, we will see that this kind of NZBCs (1.4) avoids the discussion on a multi-valued function as the case of the NLS equation [3].
The inverse scattering transform is an important method to study important nonlinear wave equations with Lax pair such as the NLS equation, the modified KdV equation, Sine-Gordan equation [5,14]. As an improved version of inverse scattering transform, the RH method has been widely adopted to solve nonlinear integrable systems [2,4,16,17,20,23].
The paper is organized as follows. In Section 2, by introducing appropriate transformations, we change the asymptotic boundary conditions (1.4) into constant boundary conditions. Furthermore, we analyze the analyticity, symmetry and asymptotic behavior of eigenfunctions and scattering matrix associated with the Lax pair. In Section 3, a generalized RH problem for the FL equation is constructed, and the distribution of discrete spectrum and residue conditions associated with RH problem are discussed. Based on these results, we reconstruct the potential function from the solution of the RH problem. In Section 4, we give the N-soliton solutions via solving RH problem under reflectionless case.
2. THE DIRECT SCATTERING WITH NZBCS
2.1. Jost Solutions
It is well-known that the FL equation (1.3) admits a Lax pair
In order to invert the nonzero boundary conditions into the constant boundary conditions, we introduce a transformation for eigenfunctions and potentials.
which implies that their eigenvalues are proportional and they share the same eigenvector matrices.
To diagonalize the matrices X± and T± and further obtain the Jost solutions, we need to get the eigenvalues and eigenvector matrices of them. Direct calculation shows that the eigenvalues of the matrices X± are
±ikαλ
; and the eigenvalues of the matrices T± are ±iηλ, where
λ=α(k+β2k),
and the corresponding eigenvector matrices are
Y±(k)=I-β2kQ±,detY±(k)=1+β2k2≜γ(k),
with
Q±=(0q±-q±*0).
With the above results, the matrices can be diagonalized as:
To properly construct the Riemann–Hilbert problem, we need to consider the asymptotic behavior of eigenfunctions and scattering matrix as k → ∞ and k → 0.
Therefore, we obtain the limit of the Jost solutions as k → ∞:
J±∼J±(0),k→∞.(2.25)
Define
J±=J±(0)μ±,(2.26)
then we have
μ±→I,k→∞.(2.27)
In addition, the asymptotic property of φ± follows:
φ±∼ei(ν-θ)σ3,k→∞.
Consider the wronskians expression of the scattering coefficients (2.17), we find that
s11(k)→1,s22(k)→1,k→∞.(2.28)
2.3.2. Asymptotic as k → 0
We first assume that J± admit a Lorrent expansion
J±=∑n=-∞n=∞knD±(n).
Substituting into (2.13) and comparing the coefficients of the same order of k gives that
D±(n)=0,n=-2,-3,⋯
. Thus we expend solution of (2.13) of the form
J±=D±(-1)k+D±(0)+D±(1)k+⋯,
then we obtain the comparison results:
x-part:
O(k-1):D±,x(-1)-12iβD±(-1)σ3=12iβσ3D±-1,(2.29)
t-part:
O(k-3):D±-1σ3=-σ3D±-1.(2.30)
It is easy to check that
D±,x(-1)=0,(2.31)
which implies
D±(-1)
is a constant independent on x. This implies that the following limit
limk→0kJ±=D±(-1)(2.32)
is uniformly convergent for x ∈R. While the following limit
limx→±∞kJ±=kI-β2Q±(2.33)
exists for every fixed k ∈C. Thus the following limit is commutative, and using (2.32) and (2.33) yields
D±(-1)=limx→±∞limk→0kJ±=limk→0limx→±∞kJ±=-β2Q±,
which leads to
J±=-βQ±2k+O(1),k→0.(2.34)
The asymptotics of functions φ± and μ± can be obtained by transformations (2.12) and (2.26). Consider the wronskian expressions of scattering coefficients and note the boundary conditions, we find that
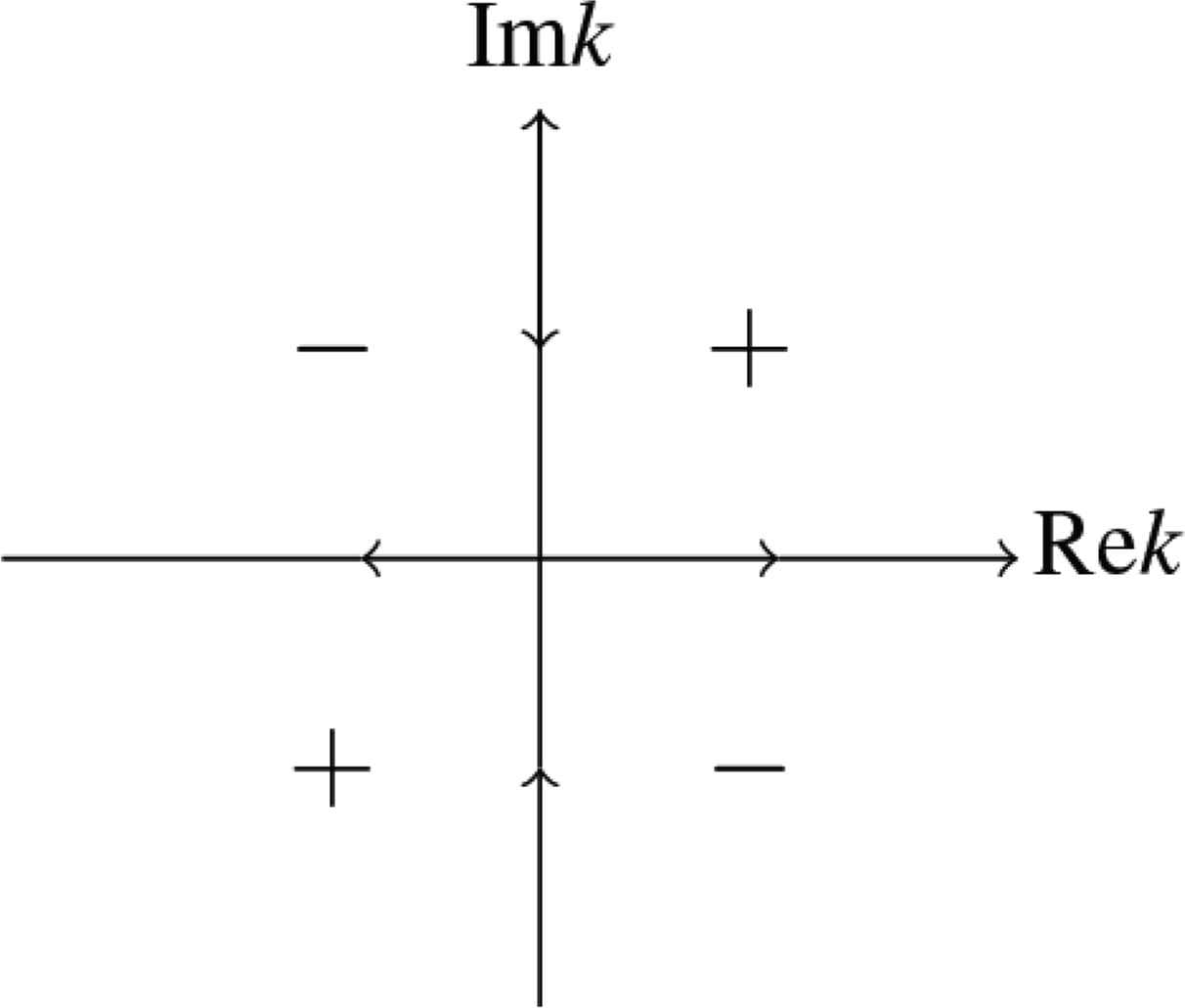
By using a similar way to Appendix A in Biondini and Kovačič [1], under mild integrability conditions on the potential, the eigenfunctions (2.37) and (2.38) can be analytically extended in the complex k-plane into the following regions:
μ-,1,μ+,2:D+,μ+,1,μ-,2:D-,(2.39)
where μ± = (μ±,1,μ±,2), the subscript 1, 2 denote the first and second column of μ±.
Apparently, the functions φ± and μ± share the same analyticity, hence from the wronskians expression of the scattering coefficients, we know that s11 is analytic in D−, and s22 is analytic in D+.
2.5. Symmetry
To investigate the discrete spectrum and residue conditions in the Riemann–Hilbert problem, one needs to analyze the symmetric property for the solutions φ± and the scattering matrix S(k).
Theorem 2.2.
The Jost eigenfunctions satisfy the following symmetric relations
σφ±*(k*)σ=-φ±(k),(2.40)
σ1φ±*(-k*)σ1=φ±(k),(2.41)
and the scattering matrix satisfies
-σS(k)σ=S*(k*),(2.42)
σ1S*(-k*)σ1=S(k).(2.43)
where
σ=(01-10),σ1=(0110).
Proof. We only prove (2.40) and (2.42), (2.41) and (2.43) can be shown in a similar way. The functions φ± are the solutions of the spectral problem
φ±,x(k)=X(k)φ±(k).(2.44)
Conjugating and multiplying left by σ on both sides of the equation gives
(σφ±*(k*)σ)x=σX*(k*)φ±*(k*)σ.
Note that σX*(k*) = X(k)σ, hence
σφ±*(k*)σ
is also a solution of (2.44). By using relations
σY±*(k*)=Y±(k)σ
and
σeiθσ3σ=-e-iθσ3
, we obtain
and Σ = R ∪ iR denotes the jump contour in Figure 1.
3.2. Discrete Spectrum and Residue Conditions
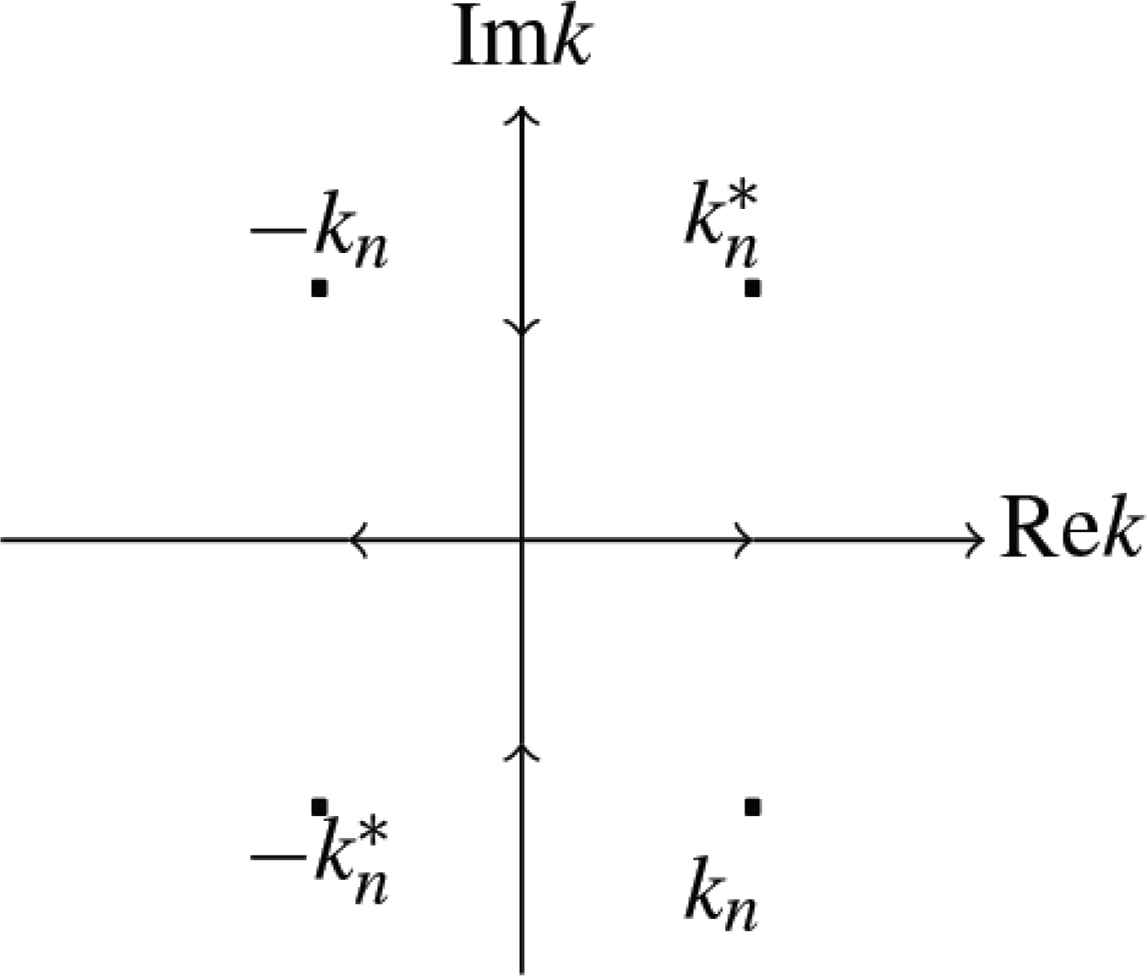
Suppose that s11(k) has N simple zeroes in D+ ∩{Im k < 0} denoted by kn, n = 1, 2, ..., N. Owing to the symmetries in (2.46), there exists
s11(kn)=0⇔s22(-kn*)=0⇔s22(kn*)=0⇔s11(-kn)=0,
thus the discrete spectrum is the set
{±kn,±kn*},(3.7)
which distribute in the k-plane as shown in Figure 2.
Figure 2
Discrete spectrum.
Next we derive the residue conditions will be needed for the RH problem. If s11(k) = 0 at k = kn the eigenfunctions φ+,1 and φ−,2 at k = kn must be proportional
φ+,1(kn)=bnφ-,2(kn),(3.8)
where bn is an arbitrary constant independent on x, t. Under the transformation (2.49), there exists linear relation for μ±
To solve the Riemann–Hilbert problem (3.3), one needs to regularize it by subtracting out the asymptotic behaviour and the pole contribution. Hence, we rewrite Eq. (3.3) as
Now we consider the potential u(x, t) for which the reflection coefficient ρ(k) vanishes identically, that is, G = 0. In this case, Eq. (3.22) reads as
we see that they are analytic and no-zeros in D− and D+, respectively. Moreover, β+β− = s11(k)s22(k). Note that detS(k) = s11s22 − s21s12 = 1, this implies
1s11s22=1-ρ(k)ρ˜(k)=1+ρ(k)ρ*(k*),
thus
β+β-=s11s22=11+ρ(k)ρ*(k*),k∈Σ.
Taking logarithms leads to
logβ+-(-logβ-)=-log[1+ρ(k)ρ(k*)],k∈Σ,
then Applying Plemelj formula, we have
logβ±=∓12πi∫Σlog[1+ρ(s)ρ*(s*)]s-kds,k∈D±.(5.2)
Substituting into (5.1), we obtain the trace formula
As an application of the formula (4.10) of N-soliton solution, we construct one-soliton solution for the FL equation, which corresponds to N = 1. Then Eq. (4.10) becomes
[20]Y Yang and E Fan, Riemann-Hilbert approach to the modified nonlinear Schrödinger equation with non-vanishing asymptotic boundary conditions. arXiv: 1910.07720.
[21]VE Zakharov and AS Fokas, Important Developments in Soliton Theory, Springer Science & Business Media, 2012.
[22]VE Zakharov and AB Shabat, Exact theory of two-dimensional self-focusing and one-dimensional self-modulation of waves in nonlinear media, J. Exp. Theor. Phys., Vol. 34, 1972, pp. 62-69.
TY - JOUR
AU - Yi Zhao
AU - Engui Fan
PY - 2020
DA - 2020/12/10
TI - Inverse Scattering Transformation for the Fokas–Lenells Equation with Nonzero Boundary Conditions
JO - Journal of Nonlinear Mathematical Physics
SP - 38
EP - 52
VL - 28
IS - 1
SN - 1776-0852
UR - https://doi.org/10.2991/jnmp.k.200922.003
DO - 10.2991/jnmp.k.200922.003
ID - Zhao2020
ER -