
Optimization of small satellite constellation design for continuous mutual regional coverage with multi-objective genetic algorithm
- DOI
- 10.1080/18756891.2016.1204112How to use a DOI?
- Keywords
- Multi Objective Genetic Algorithm; Constellation Design; Regional Coverage; Mutual Coverage; Small Satellite Constellation
- Abstract
This paper describes the application of an evolutionary optimization method to design satellite constellation for continuous regional coverage without intersatellite links. This configuration, called mutual coverage, is related to some technical limitations that exist on small satellite technology. The coverage of the north Algerian seismological network is taken as an example of application. A Multi Objective Genetic Algorithm (MOGA) is used to make a trade-off between the improvement of the coverage rate, the minimization of the total number of satellites and the reduction of the satellites’ altitude. First, some experiments have been performed to find the weight distribution of the fitness function that shows the most significant improvement of the average fitness function. Then, some optimized constellation designs are given for different ranges of altitude and it is shown that the size of the MOGA constellation design is significantly reduced compared to the traditional geometrical design.
- Copyright
- © 2016. the authors. Co-published by Atlantis Press and Taylor & Francis
- Open Access
- This is an open access article under the CC BY-NC license (http://creativecommons.org/licences/by-nc/4.0/).
1. Introduction
Designing a constellation of satellites for a given space mission is a complex multi-parametric optimization process. The aim is to find a constellation with a minimum number of satellites, in order to reduce the system’s cost and complexity. Besides the number of satellites, the designer has to define the configuration of the constellation by specifying the trajectory of each satellite defined by six initial Keplerian orbital elements: semi-major axis a, eccentricity e, inclination i, longitude of the ascending node Ω, argument of perigee ω and mean anomaly M (See e.g 1).
In order to simplify the design process and to reduce the launch cost and scheduling, symmetrical constellations have been introduced (See 2). According to the type of coverage, some models exist based on geometrical approximations. For instance, the Delta patterns constellations proposed by Ballard 3 and Walker 4 are the most popular for single global coverage using circular orbits; while the Street-of-coverage geometry introduced by Lüders in 1961 5 is used for single and redundant regional coverage by Rider 6,7. However, some missions requiring specific coverage constraints need to be resolved by means of optimization methods 8.
Evolutionary algorithms like simulated annealing 9, Ant colony 10 and Genetic Algorithms (GA) 11 have been used to propose new satellite constellation geometries and to help for the optimization of existing constellation designs. Most of the applications have studied the global coverage general case. We can cite Ferringer, et al. 12 and Whittecar, et. al 13.
For a regional coverage problem, which is our object of study, Genetic Algorithms have been mostly employed compared to other methods. In 2001, Confessor, et al. 14 proposed a genetic algorithm to design an elliptical orbit constellation for regional coverage and bands coverage in high latitude regions. The regional coverage has been also deeply explored in the region of China by Wang, et al. 15, Mao, et al. 16 and Xiao, et al. 17 to design constellations increasingly optimal for different mission objectives (communication, navigation, etc.).
In this work, we introduce the design optimization process of constellations of small satellites for regional coverage without intersatellite links (ISLs). As an example, we propose the application of regional data collection. In traditional communication satellite networks, when the data center is not visible from the satellite forwarding the data, the latter is routed via other intermediate satellites by means of intersatellite links until it reaches the data center.
Small satellites and especially the CubeSats 18 used in this study present some technical limitations. One of them supposes that it is difficult to control ISL because of the low accuracy of the attitude control subsystem 19. Therefore, in order to maintain a continuous coverage of the ground stations and the data center, we consider that the satellites must insure continuously a mutual coverage of all the ground stations and the data center supposed to be within the same area.
For this purpuse, this paper is organized as follows: first, the concept of mutual coverage is described in Section 2. Due to the fact that the existing geometrical models do not solve the mutual coverage design problem and most of them treat the instantaneous coverage of a single point on Earth, Section 3 is intended to describe the implementation of a genetic algorithm to design a constellation of satellites dedicated to provide a mutual coverage of a given region. Because we shall take into account many objectives (visibility, number of satellites, orbital altitude) in the fitness function, we are using a multi objective genetic algorithm, called MOGA (for more details, see e.g. 20, 21).
Section 4 presents an example of application and describes the design of the area considered for the mutual regional coverage, which is the north Algerian seismological network, as well as the selected GA parameters. Finally, the results are presented and discussed in Section 5 where some optimal constellation designs are computed with the help of the GA. The results obtained are compared with the traditional geometrical approach used in single point coverage.
2. Constellation geometry for regional coverage
2.1. Continuous coverage
The main objective in permanent data collection is to maintain a continuous coverage of the region of interest. Because of the reduced time of visibility due to the Earth’s rotation, a constellation organized into P > 1 orbital planes, each containing s satellites, is needed in Low Earth Orbits (LEO). For illustration, Figure 1 shows a 3D view of a constellation of inclined LEO satellites with 9 orbital planes, each containing 4 satellites.
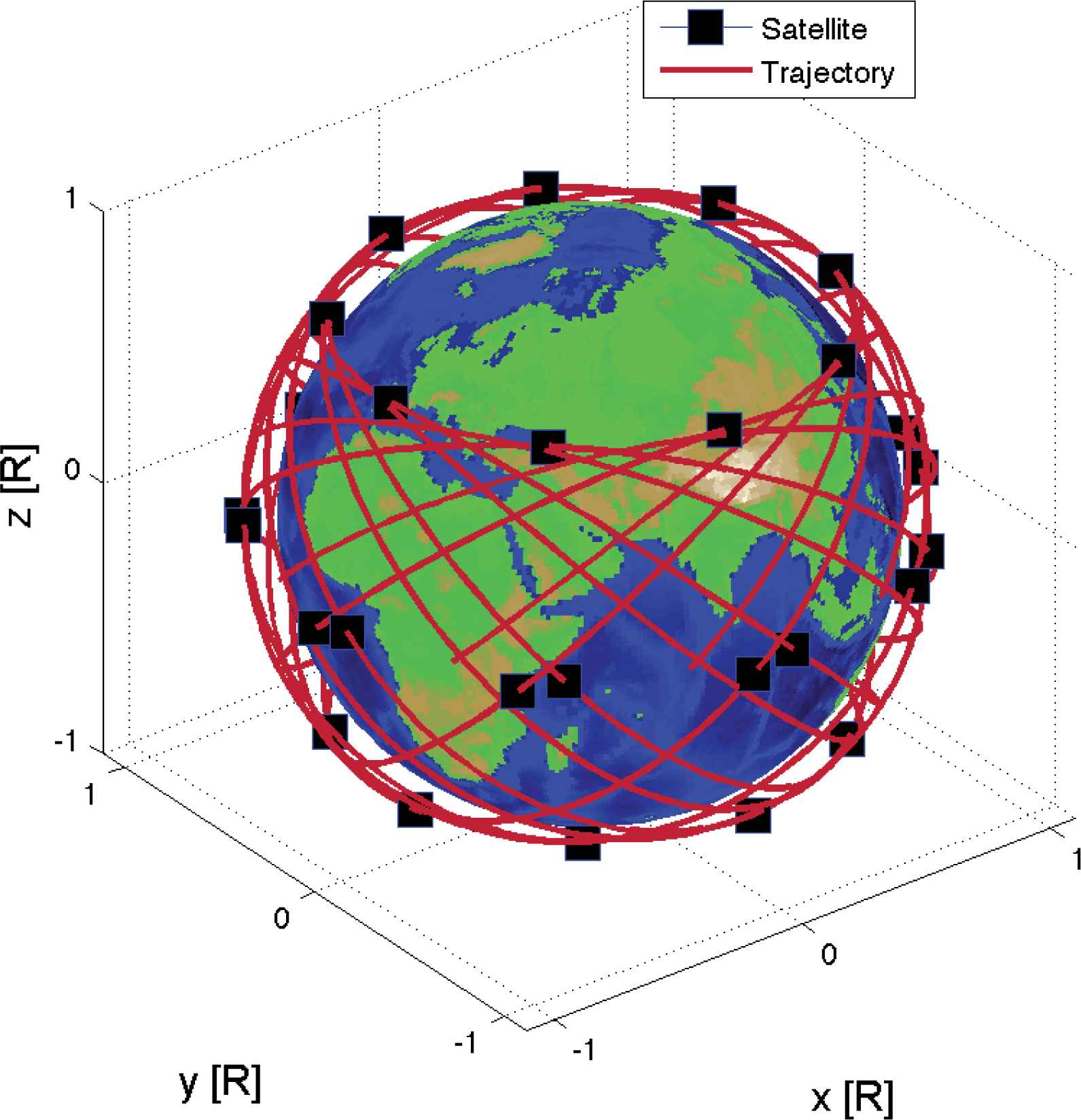
3D view of a LEO satellite constellation (P = 9,s = 4). Filled squares: the positions of the satellites. R: the Earth’s mean radius.
Near-circular orbits (e ≃ 0) are more suitable for communication satellites because the satellite is at a nearly constant altitude resulting in a constant strength signal to communicate. The P orbital planes are chosen with the same inclination angle and regularly distributed in longitude of the ascending node Ω. In what follows, the altitude parameter h is used instead of the semi-major axis a, with a = R+h and R ≃ 6371 km the Earth’s mean radius. h is considered to be constant for all the satellites.
When considering all these simplifications, Figure 2 illustrates the geometrical coverage configuration of a single point on Earth by a satellite orbiting at an altitude h of a circular orbit.
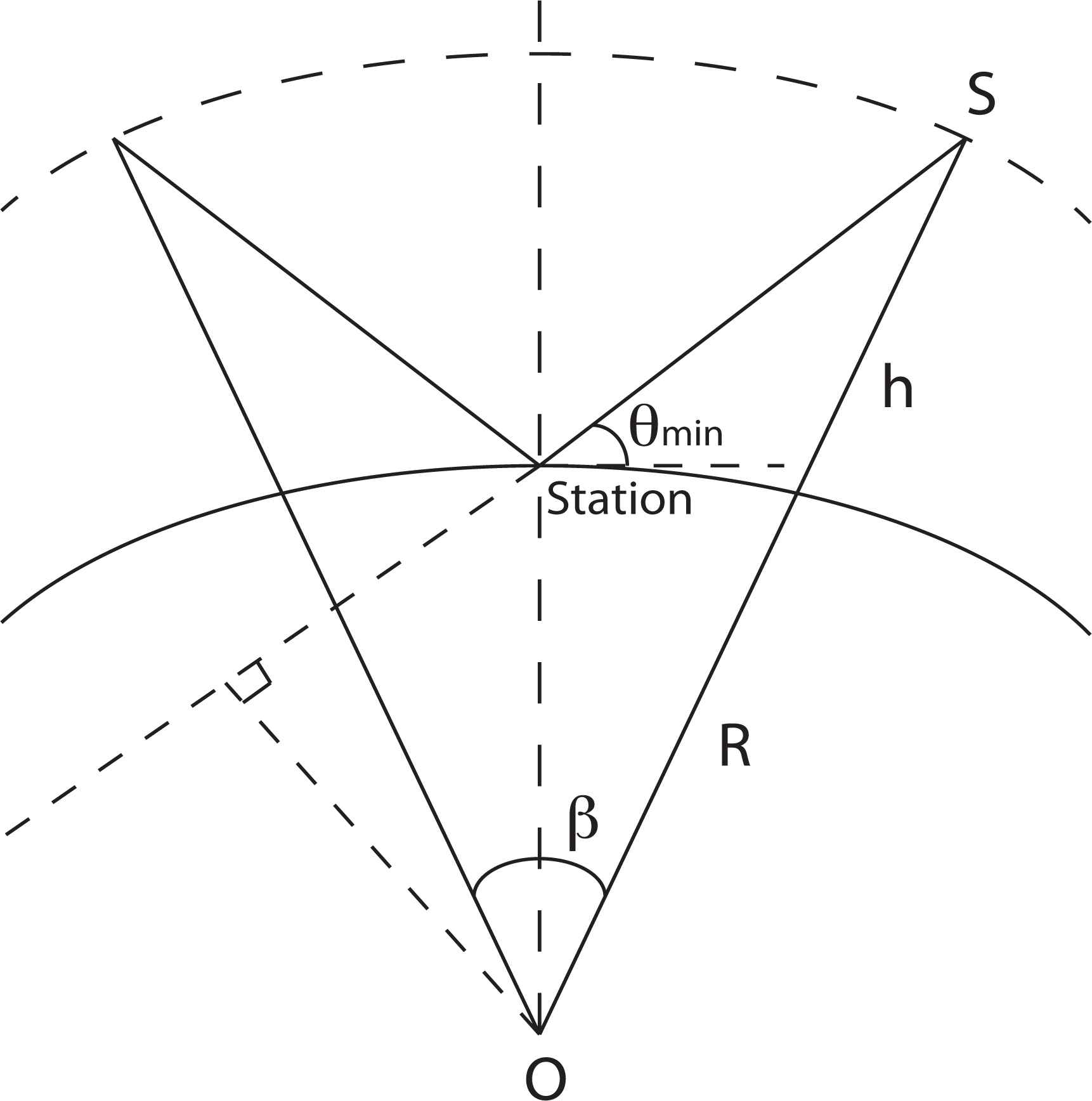
Coverage geometry of a satellite with a conical field-of-view.
For a constellation covering permanently this point, the number of orbital planes, P, and the number of satellites per orbital plane, s, can be deduced by the expressions,
The symbol ⌈ ⌉ denotes the ceiling function and β, the Earth’s central angle of visibility viewed from its center, is defined by
2.2. Mutual coverage
Intersatellite links are two way communication paths between satellites. They are used to increase the temporal resolution of LEO satellites. However, in order to maintain the communication between two satellites, a high accuracy of the satellite attitude control is required, and because of the relative motion between the satellites, the use of an antenna steering mechanism is unavoidable. All these requirements will make ISL difficult to perform on a simply designed CubeSat as it is supposed here. Thus, we consider that no ISLs are available, meaning that a mutual coverage has to be maintained between all the transmitting stations and the data center.
A satellite mutual coverage of two different Earth stations means that at instant t, a satellite has to be visible from both stations (in our case a transmitting station and the data center DC) as illustrated in Figure 3.
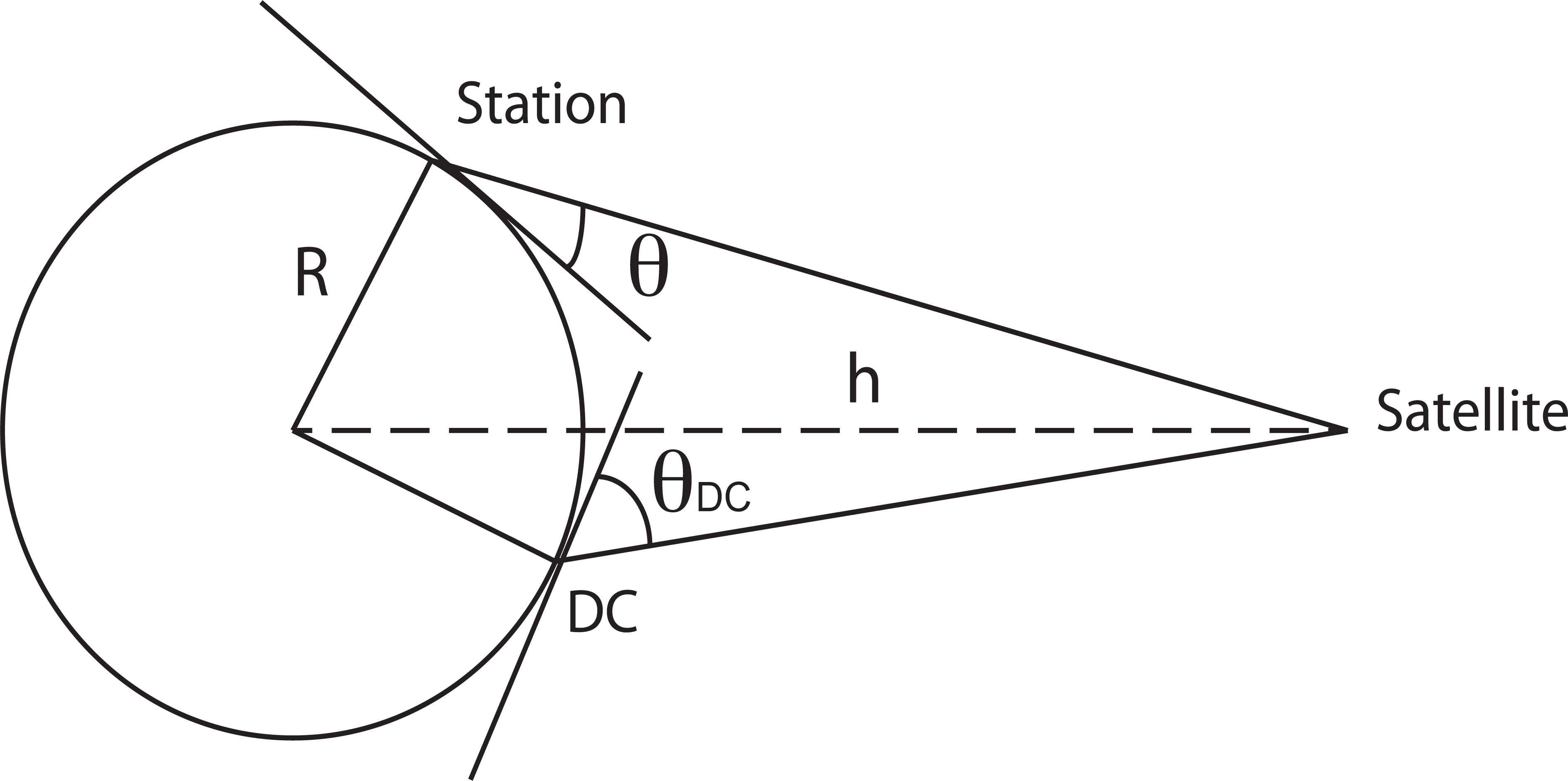
Mutual coverage of two ground stations from a satellite point of view.
The coverage function from the i-th satellite to the j-th station and the data center (DC) at the instant t is defined by
3. Constellation design using Genetic Algorithm
Genetic algorithms (GA) proved their effectiveness as an optimization method for nonlinear multi-parametric problems 22. Starting with a random intial population of solutions, a GA selects individuals with good chances of reproduction (best fitness function) and reproduces the new generation of individuals using operations such as crossover and mutation. The process is repeated several times until it runs a certain number of generations or until a solution considered as optimum is reached.
The parameters of an individual to be optimized are represented by a structure called chromosome and a binary coding is adopted here.
For satellite constellation design each chromosome represents a constellation model and the parameters to be optimized are the constellation parameters P and s, the altitude h and the inclination angle i. For the other orbital parameters, according to the simplifications supposed before, the orbital eccentricity e = 0 and the argument of perigee ω = 0. Ω and M are uniformly distributed for all the constellation. The aim of our optimization is to design a constellation which offers a continuous mutual coverage of a region by reducing the constellation size (and consequently the system cost) and the orbital altitude of the satellites. To reduce the CubeSat’s altitude is interesting in order to find easily launch opportunities and also to respect the lifetime restriction law. This point will be discussed later with more details.
A Multi Objective Genetic Algorithm (MOGA) is then implemented to find a trade-off between the following three objectives:
- (i)
Maximize the visibility rate, Rv;
- (ii)
Minimize the total number of satellites, N;
- (iii)
Reduce the altitude, h.
3.1. Fitness evaluation
Every individual (constellation) is assigned a value called fitness which is used to select the elected individuals for reproduction. The fitness function takes into account the visibility rate, the total number of satellites N and the altitude h. We apply a traditional weighted multi objective function 23. Thus, the fitness function of a constellation i can be expressed as:
3.2. Selection
The individuals are selected according to their probability of reproduction. Among the different selection methods that exist 24, we decided to use a random selection that simulates a roulette wheel with fields of different sizes. Each individual is associated to a field. The size of the field is proportional to its fitness (higher fitness: bigger fields; lower fitness: smaller fields).
In a population of size Np, the probability of selection of an individual with index i is
This selection process is then repeated until the number of selected individuals equals the population size.
3.3. Reproduction
To create new offspring from the selected parents, two main operations are usually used.
- (i)
Crossover: New offspring which share the parents’ genetic inheritance (genes) are generated with probability Pc. (usually 0.1 ≤ Pc ≤ 0.9);
- (ii)
Mutation: This allows for diversity in the population by generating new types of genes in the chromosomes. This operation is less frequent than crossover and occurs on a chromosome’s bits with a probability Pm ≤ 0.05.
4. Satellite constellation simulation results
4.1. Coverage parameters
As an example of regional data collection application, we consider the Algerian seismological network deployed in the northern part of the country. This area is located between latitudes 33°N and 37°N and longitudes −2°E and 8°E, and the data center (DC) is situated at (36.7°N; 3.02°E).
In order to simplify the coverage geometry, the area to be covered is represented by the dashed polygone covering the whole ground network as it is illustrated in Figure 4. Table 1 contains the geographical coordinates of the 5 positions (A, B, C, D, E) surrounding this area and the position of the DC.
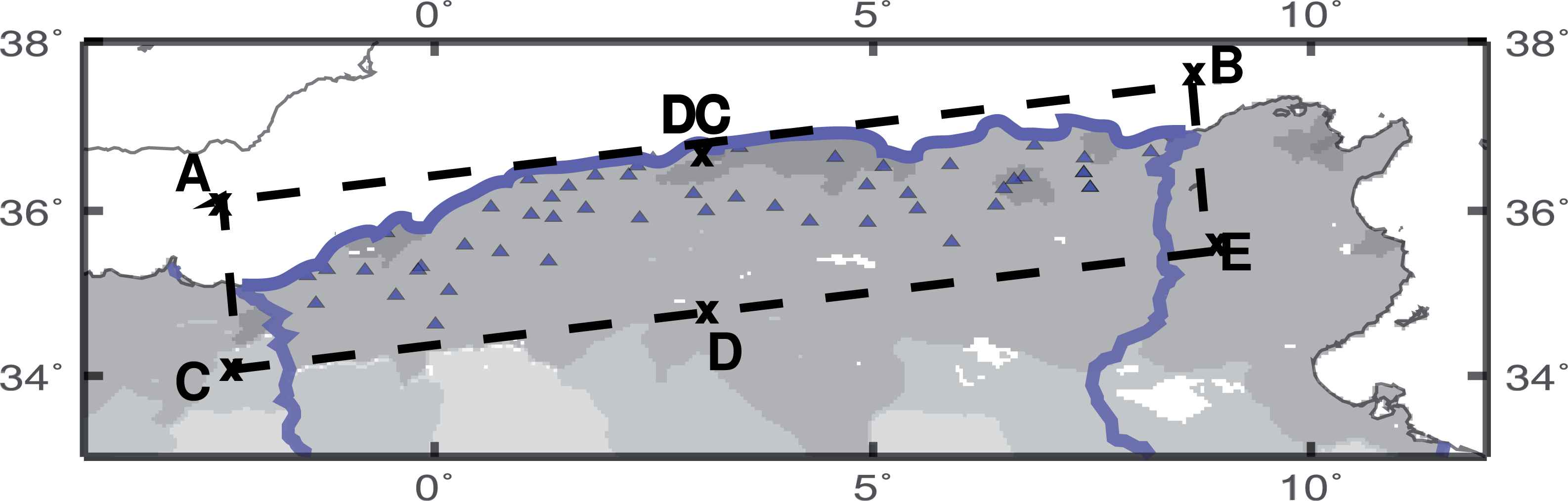
Geographical delimitation of the coverage of the north Algerian seismological network.
| Latitude(°) | Longitude(°) | |
|---|---|---|
| DC | 36.7 | 3.02 |
| A | 36.32 | −2.51 |
| B | 37.43 | 8.52 |
| C | 33.67 | −2.10 |
| D | 34.22 | 3.41 |
| E | 34.78 | 8.93 |
Positions of the terrestrial limits (A, B, C, D, E) of the area to be covered as well as the data center DC.
We suppose that, at an instant t, each couple of points [DC-A, DC-B, DC-C, DC-D, DC-E] is covered by at least one satellite. In addition, if a satellite simultaneously covers the DC and one of the points, then all the stations located within this axis are also visible by this satellite.
4.2. Genetic algorithm parameters
Since we consider only symmetrical constellations, inclined near-circular orbit constellations are designed in this study. Four parameters are to be optimized: the number of orbital planes P, the number of satellites by orbital plane s (P × s = N), the orbit altitude h and the inclination angle i. In order to avoid the radiation emitted by the Van Allen belt which may affect the CubeSat components, the satellites are in general launched at altitudes below 1000 km. Furthermore, in order to reduce the atmospheric drag and thus increase the mission lifetime, we put the minimum altitude at 500 km. The orbit inclination angle is usually chosen close to the maximum latitude of the area to be covered which is bounded by the limits presented in Table 1.
Hence, the constraints on the altitude h and inclination angle i are
Pm = 0.01 is a typical value. PC = 0.5 has been chosen because when compared with PC = 0.9 (the value of PC in Non-dominated Sorting Genetic Algorithm, NSGA-II 25) it shows a better evolution of the average fitness function, which is an evaluation parameter that we are discussing in Section 5. The values of NPopulation and NGeneration are sufficient for the evaluation below.
The fitness function, defined previously in equation (5), uses the mean value of visibility rate of the mutual coverage between the data center and the positions (A, B, C, D, E). To do that, we have implemented a near-circular orbit propagation simulator using the software Matlab. The effect of the Earth’s dynamical flattening linked to the Stokes coefficients J2 is the main perturbation. Our software evaluates the visibility time of the satellites of the constellation from each couple of ground stations during a period T = 24 hours.
Also, the time sampling is chosen to be 30 seconds. Besides the fact that this choice will reduce the calculation time of our algorithm, it is considered that the occurrence of 30 seconds gaps in the data transmission is not critical in the case of seismological monitoring process. A constellation is considered best when its fitness function is higher than the fitness of the other constellations in the population. To fit perfectly with the continuous mutual coverage objective, the selected constellation must have 100% of visibility rate.
5. Results and Discussion
5.1. Weights distribution of the fitness function
One of the most important choices that affects the GA evolution is the fitness function. The average fitness function (AFF) has to be improved during the optimization process. In Figure 5, we have tested different weight distributions, defined in (5), to maximize the AFF with respect to the number of generations. One way to do that is to choose a weight distribution leading to a good evolution of the GA. According to the importance of each objective function, we have considered that the weight associated to the maximization of the visibility rate, wRv, is always greater than wN and wh: the weights for the minimization of N, and h, respectively. To normalize the fitness function, we have put Nmin = 12 and hmin = 500 km.
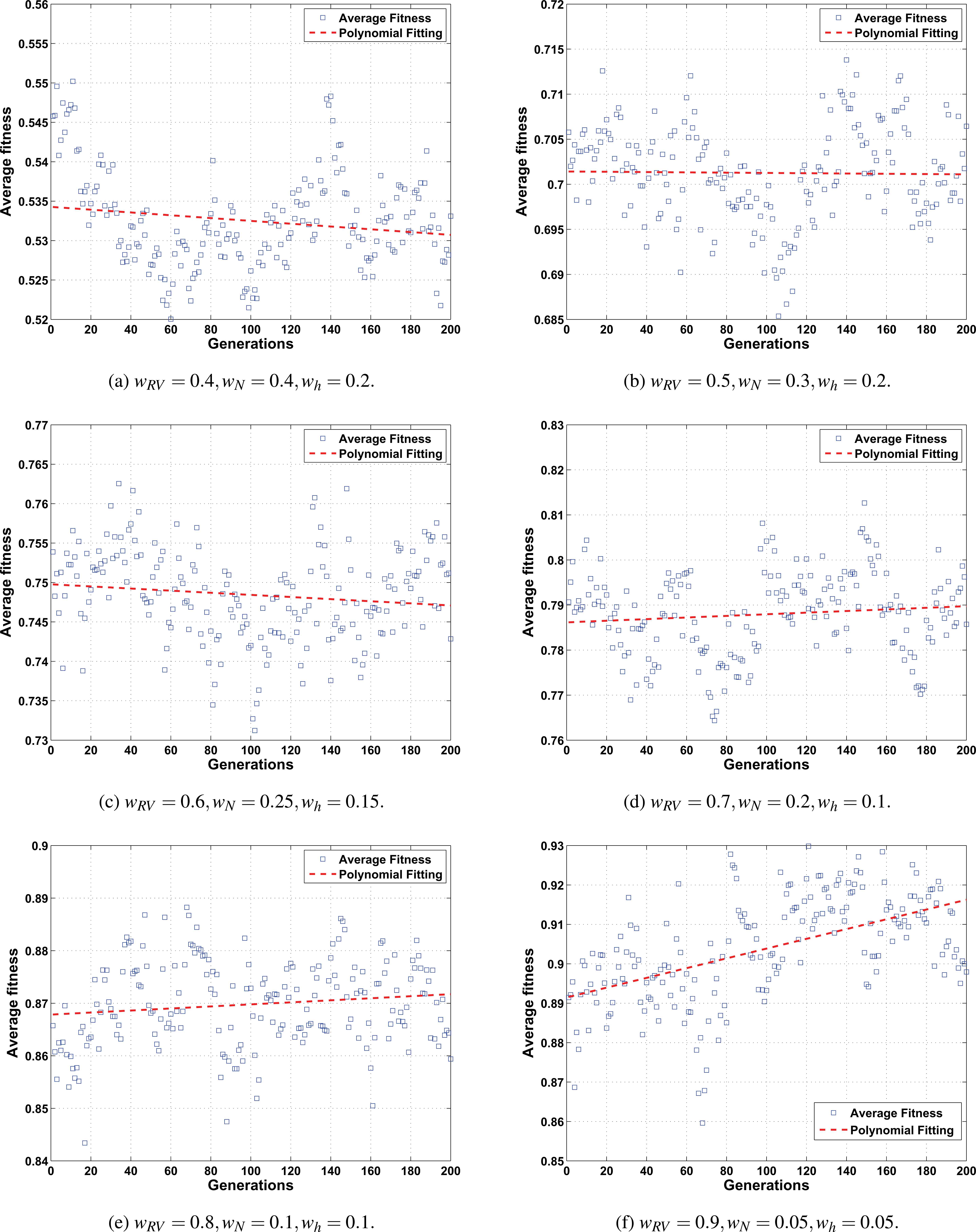
Evolution of the AFF during 200 generations for different weight distributions.
We can see in Figures 5a, 5b and 5c that the AFF trend decreases for wRv ≤ 0.6. However, an improvement is observed when wRv is much greater than wN and wh for wRv ≥ 0.7. This improvement is especially more significant for the weight distribution (wRv = 0.9, wN = 0.05, wh = 0.05) (Figure 5f). For that reason, we shall use this weight distribution in what follows.
Figure 6 shows the set of solutions with Rv = 100% where the number of satellites N is plotted versus the altitude h.
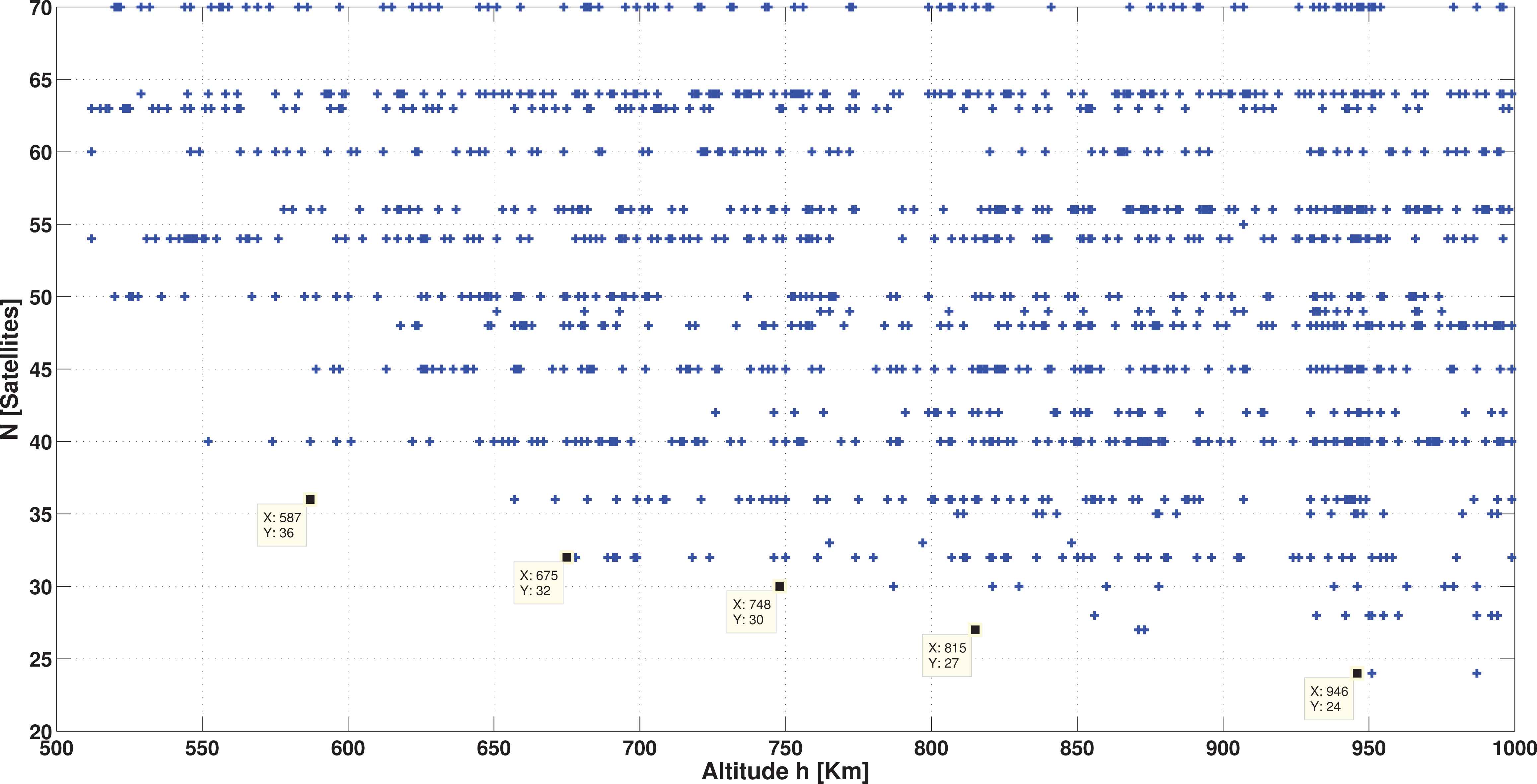
N versus h of constellations with 100% of visibility rate. The black squares with labels show the solutions with the minimum N and the minimum h in each interval of altitudes.
Since we are interested in constellations with the minimum N and the lowest altitude h, we splitted the interval of altitudes (500-1000 km) into 5 subintervals. The minimum N we obtained for each interval and the corresponding altitude are given in Table 2.
| h interval [km] | [500-600] | [600-700] | [700-800] | [800-900] | [900-1000] |
|---|---|---|---|---|---|
| Minimum N | 36 | 32 | 30 | 27 | 24 |
| Minimum h [km] | 587 | 675 | 748 | 815 | 946 |
Minimum N and h for each interval of altitudes.
5.2. Optimization
In a practical case, when designing a constellation of satellites we are faced with certain constraints. Some of them are related to the budget that mainly limits the maximum number of satellites, N, and others are related to the selected launcher and orbits to be reached (particularly h and i). For that reason, we suppose that the maximum number of satellites and the maximum altitude are fixed. There is no constaint on the inclination angle since it has not been taken into account in the optimization objectives.
The aim of this step is to improve the results obtained in Table 2. The MOGA is used to find and design an optimum constellation by taking into account these contraints:
- •
Rv = 100%;
- •
Constellation size N ≤ Nmax;
- •
Altitude of the satellites orbit h ≤ hmax.
This approach is repeated for the other conditions in Table 2 and the results are summarized in Table 3.
| Expected solution | Solution found | Geometrical design | ||||||
|---|---|---|---|---|---|---|---|---|
| Nmax | hmax[km] | N | h[km] | P | i[deg] | Number of Generations | N | P |
| 36 | 587 | 36 | 584 | 9 | 42 | 7 | 60 | 10 |
| 32 | 675 | 30 | 672 | 10 | 48 | 46 | 54 | 9 |
| 30 | 748 | 30 | 705 | 10 | 49 | 24 | 45 | 9 |
| 27 | 815 | 27 | 812 | 9 | 50 | 13 | 40 | 8 |
| 24 | 946 | 24 | 928 | 8 | 48 | 12 | 40 | 8 |
Local optimum satellite constellations whith two requirements: Nmax and hmax.
The first part of Table 3, ”Expected solution”, contains Nmax and hmax. In our case, because we know in advance the expected solution, this one is used as a stop condition of the GA. Thus, we have chosen the expected solutions (Nmax, hmax) from the results obtained in the first part of the optimization. Thus we know in advance that these solutions exist. However in a practical case, we have a couple of conditions (Nmax, hmax) and we try to verify if an optimal solution can be found with the MOGA. If so, the constellation parameters (N, P, h, i) are given by the algorithm. Otherwise we conclude that no solution has been found after a certain number of generations.
The second part of Table 3, ”Solution found”, presents the results of the optimization process and gives the parameters of the designed constellation (N, h, P, i) as well as the number of generations spent to find this solution. We notice that, in all the simulations, the altitude h has been slightly reduced which probably means that the results obtained from the first part of the study was near to the optimum and that NGeneration = 200 was enough to carry out the optimization. Also, we notice that for the solution of the second simulation (second line of the Table 3), N has been reduced from 32 to 30 satellites. For the other cases, the optimization gives the same results, which means again that the results presented in Table 2 are effective.
The last part of Table 3, ”Geometrical design”, serves to compare the optimized constellation parameters with the constellation that would be designed with a simple geometrical approach presented in Section 2.1 for continuous coverage design. We notice that the constellation size N is significantly optimized using the GA compared to a traditional geometrical approach. Indeed, for an altitude equal to 584 km, the minimum N found with the GA optimization is 36 satellites while it is 60 with a geometrical design. The gain of N is about 40%. This difference is due to the approximations supposed in the geometrical configuration (represented in Figure 2) such as the spherical aspect of the Earth (the Earth’s radius R is considered constant at every point on Earth). However, the effect of the Earth’s dynamical flattening, J2, has been considered in the orbital simulation used by the GA optimization.
5.3. Satellite orbital lifetime
For continuous mutual coverage of the north Algerian seismological network, the minimum constellation designed using our MOGA corresponds to the last line of Table 3: N = 24, h = 928 km, P = 8 and i = 48°. However, satellites launched at these altitudes have an orbital lifetime greater than what it is allowed by the Inter-Agency Space Debris Coordination Committee (IADC) 26. Indeed, for LEO satellites the orbital lifetime is limited to 25 years. Otherwise, the satellite must contain a deorbiting device 27 which forces its re-entry. The use of such a system will increase the system cost and complexity. For that reason it is more suitable to opt for a solution without deorbiting system by choosing an appropriate orbital altitude.
The orbital lifetime of a CubeSat, with and without an on-board deorbiting device, is illustrated in Appendix A.1 for altitudes below 1000 km. For altitudes up to 667 km, we can see that the orbital lifetime of a satellite without a deorbiting device is 25 years. Then, the optimum solution corresponding to this altitude is the constellation for which N = 36 satellites, P = 9, i = 42°, h = 584 km.
6. Conclusions
In this paper we have presented some numerical results for designing a small satellite constellation using MOGA, intended to insure a coninuous mutual coverage of the north Algerian seismological network by reducing, precisely, the constellation size and the orbital altitude. Effects of the weight distribution of the fitness function have been studied and it appears that (wRv = 0.9; wN = 0.05; wh = 0.05) is a good choice. Afterward, the algorithm has been used to design a set of constellations in a range of altitudes from 500 to 1000 km and according to some supposed project requirements: maximum total number of satellites and maximum altitude, and by taking into account the LEO orbital lifetime law, we can propose two solutions:
- •
Simple CubeSat: N = 36, P = 9, i = 42° and h = 584 km;
- •
CubeSat with deorbiting device: N = 24, P = 8, i = 48° and h = 928 km.
These first results are satisfying compared to a traditional geometrical design (60 satellites with geometrical design and 36 with the MOGA for h = 584 km and i = 42°). However, further studies should be done to compare and improve these results. Testing other kinds of MOGA such as Randomly Assigned Weighted Aggregation (RAWA) or Non-dominated Sorting Genetic Algorithm (NSGA-II 25) seems to be more pertinent than studying extensively the effects of other GA parameters (population size, generation size, crossover and mutation probability, etc.).
Acknowledgments
The authors are grateful to Averroes - Erasmus Mundus 2012, a Euro-Maghrebian exchange program for financially supporting this study which has been partially conducted in the laboratory Géoazur of the University of Nice Sophia-Antipolis, France.
Appendix A
A.1. Satellite lifetime estimation
The Inter-Agency Space Debris Coordination Committee (IADC) 26 limits the LEO satellites lifetime to 25 years. Numerical simulations have been performed using the software STELA 28 to estimate the orbital end-of-life of a CubeSat (10 × 10 × 10 cm3, 1 kg) to be launched in the range of altitudes (500 − 1000 km) and with an orbit inclination angle equal to 41°. Figure A.1 shows the orbital lifetime of the selected CubeSat without and with a deorbiting device (marqued with *). The deorbiting device used is a passive drag sail 27,29 with the dimensions presented in Table A.1. It is supposed to be deployed after the mission lifetime in order to reduce the orbital lifetime when this one exceeds 25 years.
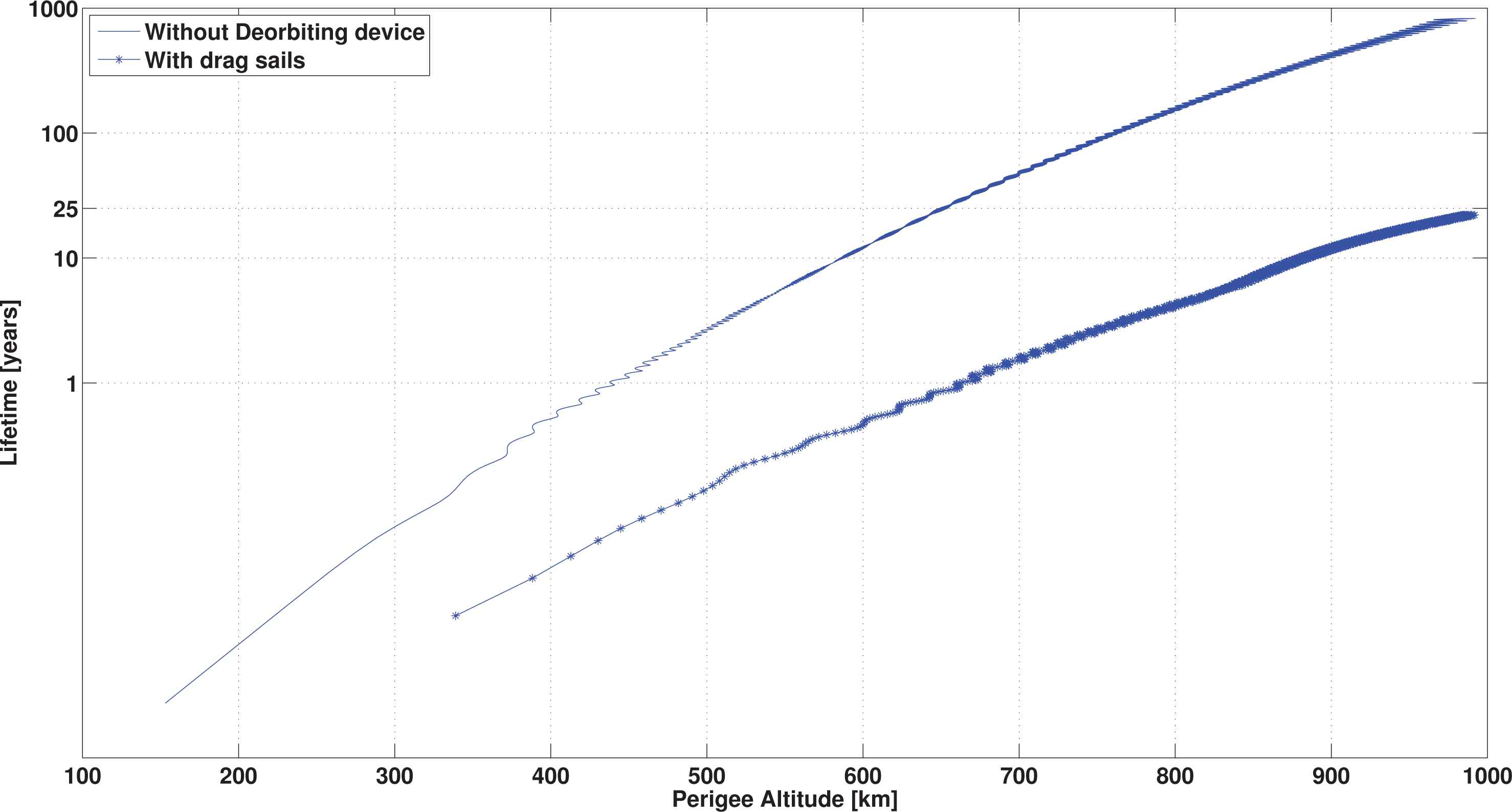
CubeSat orbital lifetime (*) without a deorbiting device and (-) with a deorbiting device, example: drag sails.
| Parameter | Value | |
|---|---|---|
| Satellite | Mass | 1 kg |
| Reflecting coefficient | 1.5 | |
| Reflecting area | 1.01dm2 | |
| Drag area | 1.01dm2 | |
| Drag sails | Drag area | 25 dm2 |
| Atmospheric drag | Quadrature points | 33 |
| Recompute every | 2 steps | |
| Solar radiation pressure | Quadrature points | 11 |
| Simulation | Re-entry altitude | 120 km |
| Integrator step | 24 hours | |
Lifetime estimation parameters
Table A.1 summarizes the parameters used in the estimation of the orbital lifetime of a 1U CubeSat.
References
Cite this article
TY - JOUR AU - I. Meziane-Tani AU - G. Métris AU - G. Lion AU - A. Deschamps AU - F. T. Bendimerad AU - M. Bekhti PY - 2016 DA - 2016/08/01 TI - Optimization of small satellite constellation design for continuous mutual regional coverage with multi-objective genetic algorithm JO - International Journal of Computational Intelligence Systems SP - 627 EP - 637 VL - 9 IS - 4 SN - 1875-6883 UR - https://doi.org/10.1080/18756891.2016.1204112 DO - 10.1080/18756891.2016.1204112 ID - Meziane-Tani2016 ER -