
Comparison of the Questionnaires Before and After the Experiment
- DOI
- 10.2991/jrnal.k.201215.011How to use a DOI?
- Keywords
- Control education; evaluation; feedforward; feedback; proportional; gain
- Abstract
The aim of the present study is to improve the understanding of the control engineering for university students through the experience of the control experiment, and hence an experimental device is developed. The students are educated the control engineering using the device, and the educational effect is evaluated. In the present study, the students take examinations for the control engineering before and after the experiment, and the effect is evaluated objectively.
- Copyright
- © 2020 The Authors. Published by Atlantis Press B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
In the engineering education, the control engineering is educated for the students who have taken mathematics, applied physics, mechanical engineering, electrical engineering and so on. The control engineering is not easy for students to understand intuitively only by the classroom lecture. Therefore, effective educational methods are demanded [1,2]. To realize the class of the control engineering through an experience of the control experiment, experimental devices have been developed [3–5]. In Sato et al. [3], an experimental device that combines a model helicopter with a computer screen is developed, and students experience flight control. In Yasui et al. [4], a flotation device is also developed, and the buoyancy generated by a propeller is adjusted to control the altitude of a floating object. However, in the conventional studies [3–5], because the educational effect is evaluated subjectively, it is not evaluated that students understand correctly. On the other hand, in the present study, questionnaire is answered before and after the experiment, and the difference between the questionnaires. As a result, the educational effect is evaluated objectively.
2. EDUCATIONAL OBJECTIVE
The educational objective for developing an experimental device is that engineering students understand the following control actions:
- •
Manual control
- •
Automatic control
- •
Feedback control
- •
Feedforward control
- •
Proportional control
3. EXPERIMENTAL DEVICE
The developed experimental device is shown in Figure 1. In the device, and its schematic diagram is illustrated as Figure 2. In the device, the arm is rotated by a motor, and the control objective is to make the rotation angle of the arm be settled at the specified angle. In the manual control, the torque generated by the motor is changed by tuning a volume manually. In the automatic control, the rotation angle of the arm is measured, and the torque is decided by a computer using the measured angle.
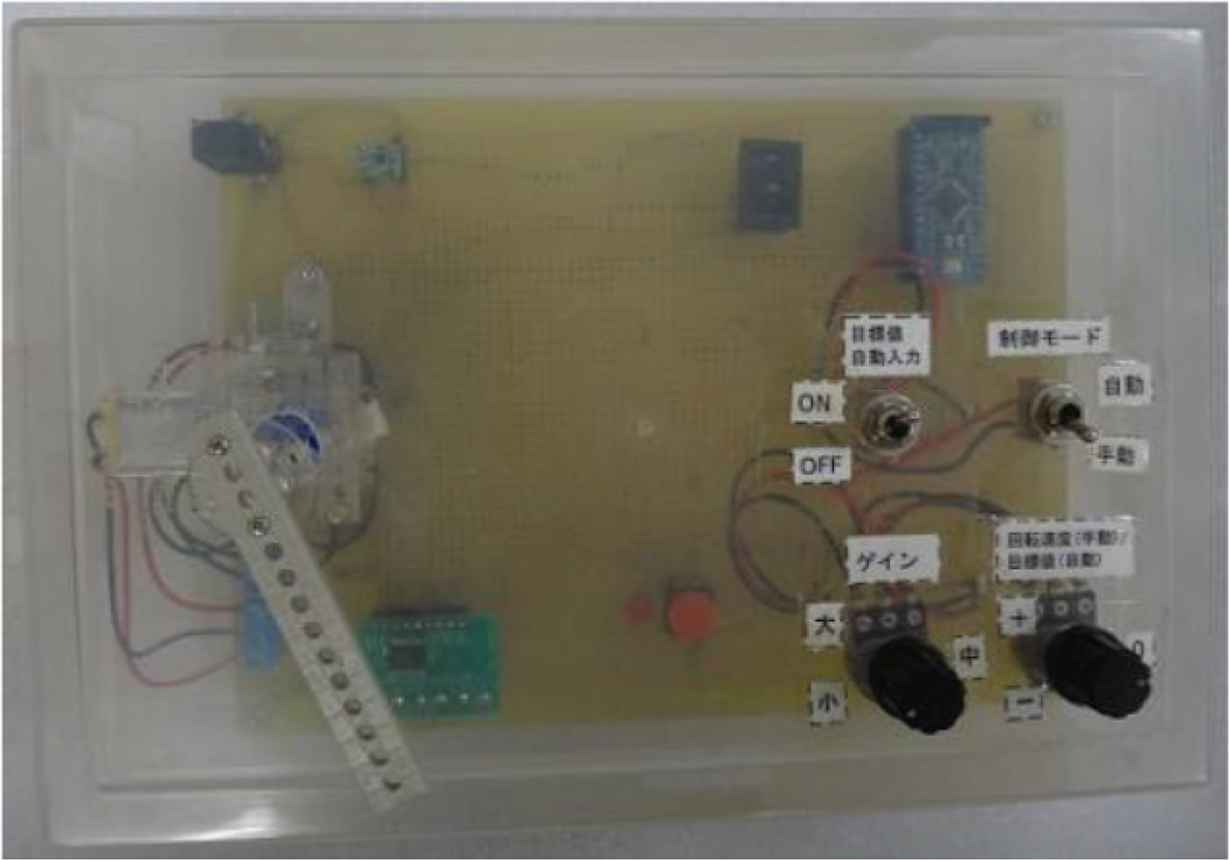
Arm control device.
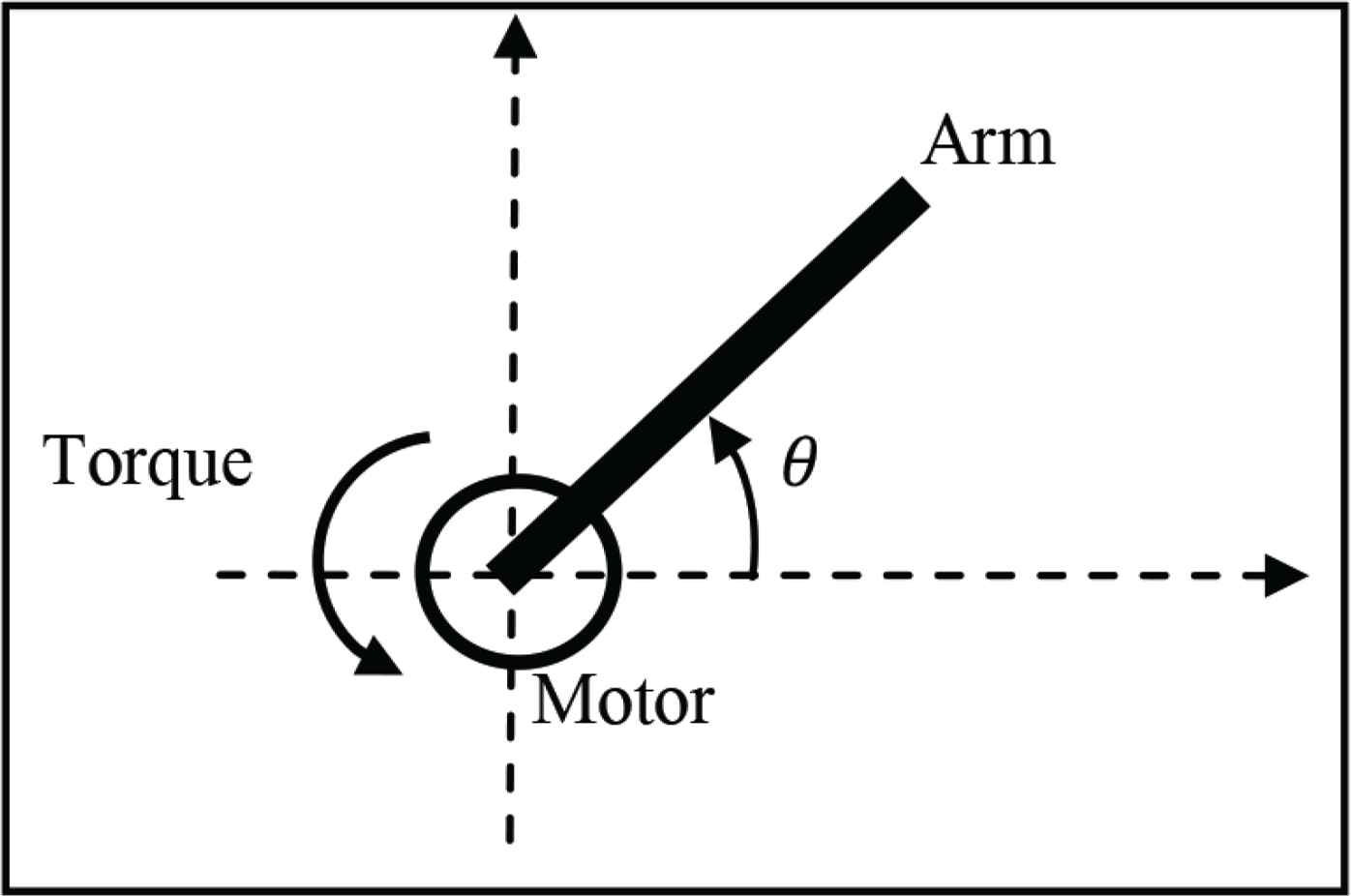
Schematic diagram of the experimental device.
Using the device, the students experience the control actions and can understand these meanings intuitively. The control actions implemented in the device are listed as follows:
- •
Manual control
- •
Feedback control
- •
Feedforward control
- •
- •
Automatic feedback control
- •
Small proportional gain
- •
Middle proportional gain
- •
Large proportional gain
- •
In the manual feedback control, the students recognize the rotation angle of the arm by watching with students’ own eyes. Conversely, in the manual feedforward control, the students tune the volume manually without watching the arm to make the rotation angle be specified angle. Because it is difficult to control the rotation angle manually regardless of whether watching or not, the students can understand the usefulness of the automatic control. The feedforward manual control is naturally more difficult than the feedback manual control.
In the automatic control, the control input u(t) is decided by the following control law:
4. EVALUATION
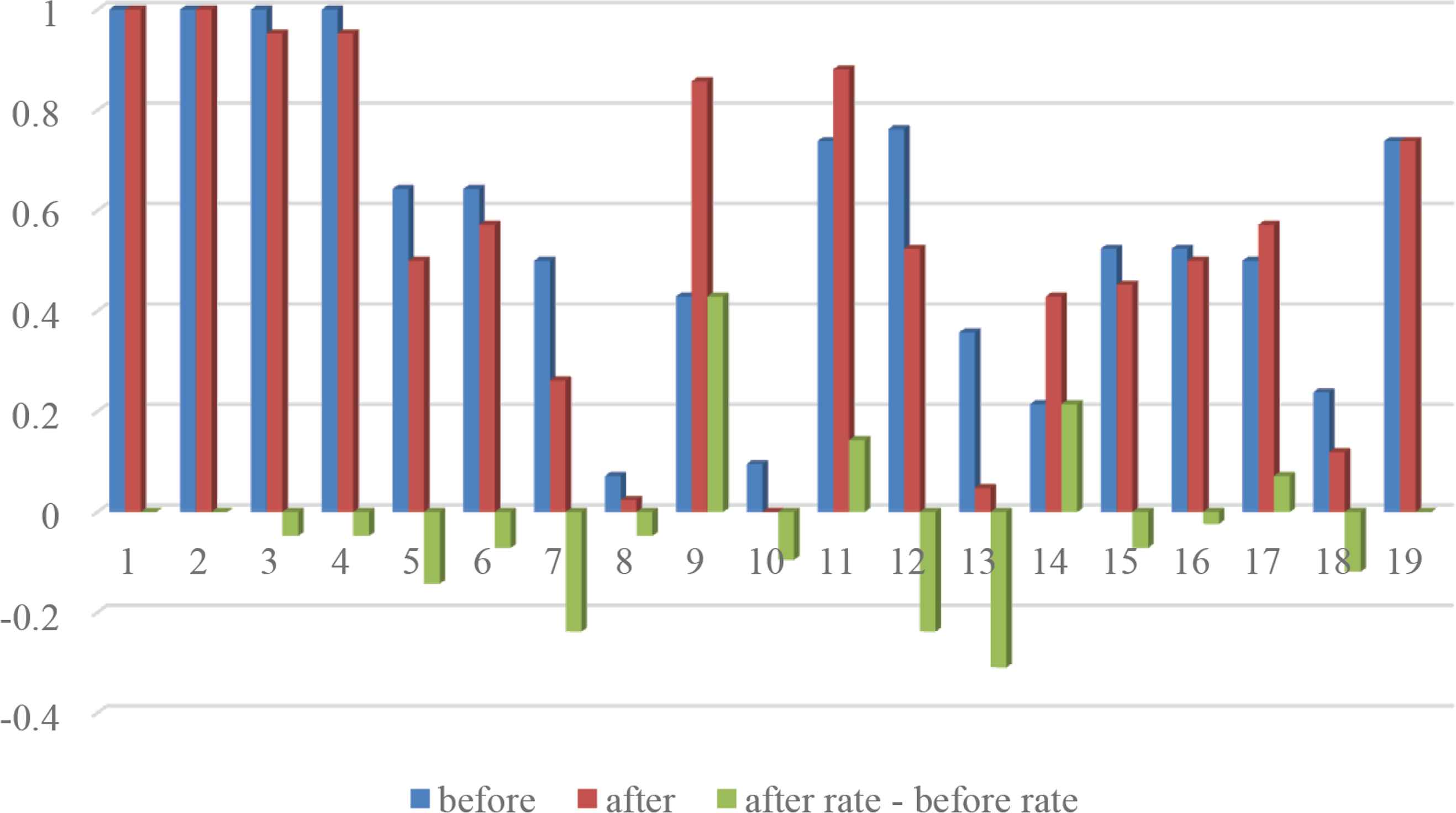
To objectively evaluate whether the educational objective is achieved, the students answer the questionnaire shown in Table 1 before and after the experiment. The questionnaire consists of 19 questions, the correct answer rates are depicted in Figure 3. In the figure, the blue bar shows the correct answer rate before the experiment, and the red bar shows after the experiment. Further, the green bar shows the difference between the before and after experiments.
| Term in control system | Questions | Number in Figure 3 |
|---|---|---|
| Manual control | Manipulated amount is decided by human | 1 |
| Manipulated amount is decided by other than human | 2 | |
| Automatic control | Manipulated amount is decided by human | 3 |
| Manipulated amount is decided by other than human | 4 | |
| Manual control vs. automatic control | Manual control structure is simpler than automatic control | 5 |
| Automatic control structure is simpler than manual control | 6 | |
| Feedback control | Stability can be improved | 7 |
| Stability can be worsened | 8 | |
| Reference tracking performance can be improved | 9 | |
| Reference tracking performance can be worsened | 10 | |
| Feedforward control | Stability can be improved | 11 |
| Stability can be worsened | 12 | |
| Reference tracking performance can be improved | 13 | |
| Reference tracking performance can be worsened | 14 | |
| Feedback control vs. feedforward control | Feedforward control structure is simpler than feedback control | 15 |
| Feedback control structure is simpler than feedforward control | 16 | |
| Proportional control | Response speed can be improved | 17 |
| Response speed can be worsened | 18 | |
| No steady-state error | 19 |
Questionnaire before and after experiment
Correct answer rate before and after experiment.
Figure 3 shows that most of the students understand the mechanisms of the manual control and the automatic control and understand little about that the stability and the tracking performance can be worsened by the feedback control. Since the rates of Questions 9 and 14 of after experiment are increased compared with those before experiment, the number of the students who understand that the tracking performance can be improved and worsened by the feedback control and the feedforward control, respectively, is increased by experiencing the control experiment. On the other hand, from Questions 7, 12, and 13, the number of the students who misunderstand that the stability and tracking performance can be changed by the feedback control and the feedforward control, is increased.
5. CONCLUSION
In the present study, the educational effect using the experiment is evaluated objectively. In the developed device, since the integral and derivative compensations are not implemented, and the compensations should be introduced. As the evaluation result, not all understanding rates are increased with the current teaching method. Therefore, our future work is to enhance the control engineering lesson to increase the correct answer rate after experiment.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
ACKNOWLEDGMENT
This study was supported by JSPS KAKENHI Grant Number 16K06425.
AUTHORS INTRODUCTION
Mr. Yugo Tokura
 He received the B.Eng degree from University of Hyogo in 2019. He is a graduate student at University of Hyogo. His research interests are in the area of the reference governor using evolutionary computation.
He received the B.Eng degree from University of Hyogo in 2019. He is a graduate student at University of Hyogo. His research interests are in the area of the reference governor using evolutionary computation.
Dr. Takao Sato
 He received the B.Eng and M.Eng degrees from Okayama University, in 1997 and 1999, respectively, and his D.Eng degree from Okayama University in 2002. He is an associate professor in the Graduate School of Engineering at University of Hyogo. His research interests are in the area of PID control, mechanical system and multirate control.
He received the B.Eng and M.Eng degrees from Okayama University, in 1997 and 1999, respectively, and his D.Eng degree from Okayama University in 2002. He is an associate professor in the Graduate School of Engineering at University of Hyogo. His research interests are in the area of PID control, mechanical system and multirate control.
Mr. Ryota Yasui
 He received the B.Eng and M.Eng degrees from University of Hyogo in 2017 and 2019. His research interests are in the area of control education and multi-rate control.
He received the B.Eng and M.Eng degrees from University of Hyogo in 2017 and 2019. His research interests are in the area of control education and multi-rate control.
Dr. Natsuki Kawaguchi
 He received the D.Eng degree from University of Hyogo in 2018. He is an Assistant Professor in the Graduate School of Engineering at University of Hyogo. His research interests are in the area of fault detection and fault tolerant control.
He received the D.Eng degree from University of Hyogo in 2018. He is an Assistant Professor in the Graduate School of Engineering at University of Hyogo. His research interests are in the area of fault detection and fault tolerant control.
Dr. Nozomu Araki
 He received his PhD degree from University of Hyogo, Japan in 2007. He is presently working as an Assistant Professor in the Department of Mechanical System, University of Hyogo, Japan. His research interest includes control engineering, signal processing and medical engineering.
He received his PhD degree from University of Hyogo, Japan in 2007. He is presently working as an Assistant Professor in the Department of Mechanical System, University of Hyogo, Japan. His research interest includes control engineering, signal processing and medical engineering.
Prof. Yasuo Konishi
 He received his PhD in mechanical engineering from Keio University, Tokyo, Japan, in 1989. He is a professor at the University of Hyogo and is presently the head of the Laboratory of Control Engineering. His research focuses on the game-theoretical approach to mechanical design, time optimal control by binary input using MLDS, and positioning control with static and kinetic friction using hybrid controllers.
He received his PhD in mechanical engineering from Keio University, Tokyo, Japan, in 1989. He is a professor at the University of Hyogo and is presently the head of the Laboratory of Control Engineering. His research focuses on the game-theoretical approach to mechanical design, time optimal control by binary input using MLDS, and positioning control with static and kinetic friction using hybrid controllers.
REFERENCES
Cite this article
TY - JOUR AU - Yugo Tokura AU - Takao Sato AU - Ryota Yasui AU - Natsuki Kawaguchi AU - Nozomu Araki AU - Yasuo Konishi PY - 2020 DA - 2020/12/28 TI - Comparison of the Questionnaires Before and After the Experiment JO - Journal of Robotics, Networking and Artificial Life SP - 262 EP - 265 VL - 7 IS - 4 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.201215.011 DO - 10.2991/jrnal.k.201215.011 ID - Tokura2020 ER -