
Spherical Mobile Robot Driven by Single Omni Wheel
- DOI
- 10.2991/jrnal.k.191202.003How to use a DOI?
- Keywords
- Spherical mobile robot; omni wheel; arc track; eccentric gravitational moment
- Abstract
This paper presents a new spherical mobile robot driven by single omni wheel. The physical model is that an arc track is built inside the sphere shell and can rotate around a spherical diameter freely. It supports one driving omni wheel and keeps the driving omni wheel touching the inside of the sphere shell. The touching friction force can drive the sphere rolling forward or backward. Steering drive can move the omni wheel running along the arc track, that leads the spherical mobile robot turning left or right. The omni wheel can run sphere shell in straight way and turn its direction freely at same time. The mechanism of the spherical mobile robot is described in detail, and its motion and dynamics coordinate systems are built to analysis. The preliminary analysis shows that the robot has a variety of good motion capabilities, such as obstacle crossing, jumping, small radius steering etc.
- Copyright
- © 2019 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
The sphere is concise shape with the smallest surface area, the largest volume, and rolling in all direction. It is the most excellent shape existing in the universe, and the best rolling body that every animal likes to play with. The typical characteristics of the sphere are: (1) when no friction and air resistances, an ideal sphere with uniform density will be kept moving forward straightly and smoothly by the inertia force and moment of inertia; (2) when the mass centroid close to the sphere center, the position attitude is in stable, and when the mass centroid away from the center, the sphere has a strong tendency to self-stabilization, etc. The characteristics of spheroid inspire the enthusiasm of scholars to invent many kinds of spherical robots. Since the spherical robot concept first appeared, it was considered as a new technology to lead the robot industrial revolution such as the implementation in planet-moon exploration, military usage, and inevitably arising the demand of the toy entertainment industry [1,2].
Through reviewing literature and patents, there are several types of representative spherical robots, and according to their physical driving principles, the current spherical robots with omnidirectional motion performance could be divided into two typical categories: (1) Inertia moment driving type [2], the principle is to rely on the rotating inertia moment to drive the omnidirectional rolling of a spherical robot, but the inertia moment needs the rapid rotation like spinning gyroscope to acquire enough driving force. (2) Eccentric torque drive type, its principle is to rely on the motion of eccentric mass centroid producing the eccentric torque on the fulcrum, and the eccentric torque drives the spherical robot rolling. The invention of drive mechanism with eccentric torque driving the spherical robot has been very rich [3–9]. One of the earliest and concise spherical robots is invented and researched by Halme et al. [3]. Its driving mechanism is made up of a driving wheel, a steering shaft and a balance wheel. One of recent and most concise spherical robots is reported by Wei et al. [9]. It has two independent driving omni wheels located at each end of the inside vertical diameter of the sphere shell, and the two wheels’ axes are in orthogonal position. Both omni wheels can roll on the inner surface of the spherical shell by their friction forces. The lower omni wheel is responsible for walking drive, and the upper one for steering drive.
Although there are many mechanisms to realize the eccentric torque drive principle, their physical model can be described briefly as shown in Figure 1. Supposing the only resistance is the rolling resistance torque Tf , the torque T caused by mass centroid is considered to drive or steer the robot rolling. The distance r which from the sphere center to the mass centroid m directly determines the quantity of the driving torque T, that is, T = m⋅g⋅r⋅sin(a). When T > Tf , the spherical robot will start to move and increase speed. When T = Tf , the spherical robot will move uniformly. When T < Tf , the spherical robot will reduce speed until stop.
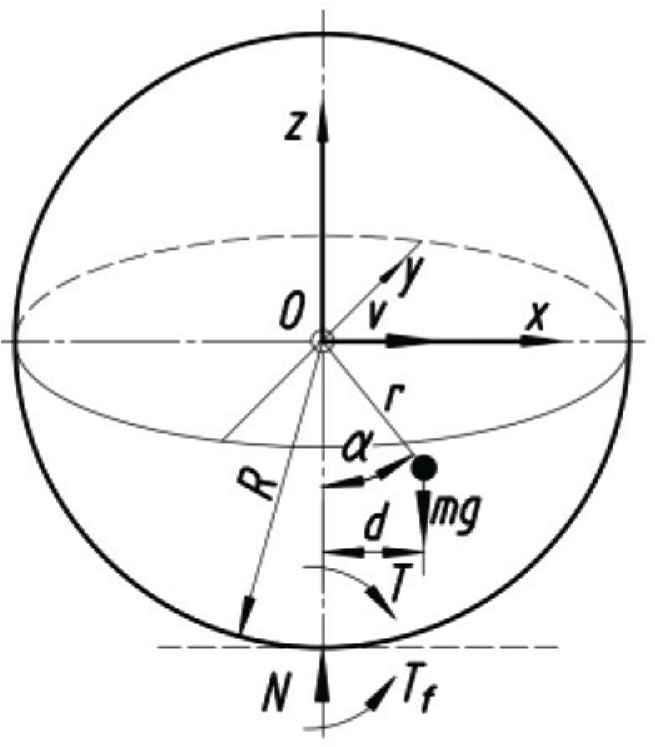
Principle of eccentric torque drive.
This paper proposes a novel and concise spherical robot mechanism with only one omni wheel to drive the eccentric torque overcome the rolling resistance torque. The spherical robot can realize the omnidirectional motion in any direction. The omni wheel is arranged by a series of small rollers around the circumference which are perpendicular to the driving direction. When omni wheel drives, its rollers can slide laterally on the wheel periphery. The lateral rolling of small rollers does not interfere its circumferential driving function. The mechanism is shown in Figure 2. The spherical robot driven by one omni wheel will be analyzed as following in several aspects as mechanism composition, motion and dynamics analysis etc.

Omni wheel.
2. MECHANISM
The spherical mobile robot contains spherical shell, arc track and drive assembly which include chassis, support wheels, driving motor, steering motor, side wheels, springs etc. Its interior structures are shown in Figure 3. The structure shows the mass centroid is in the lowest position now. An omni wheel is located under the arc track and touches the inner surface of the spherical shell. The support wheels, driving motor, steering motor, side wheels, springs and omni wheel are fixed in the chassis. The support wheels roll along the arc track by the track force which are acquired by the friction from the springs pressure, or by the engaged gear track and wheel. The side wheels keep the omni wheel stable in the arc track plane and let the drive assembly moving along the arc track freely.
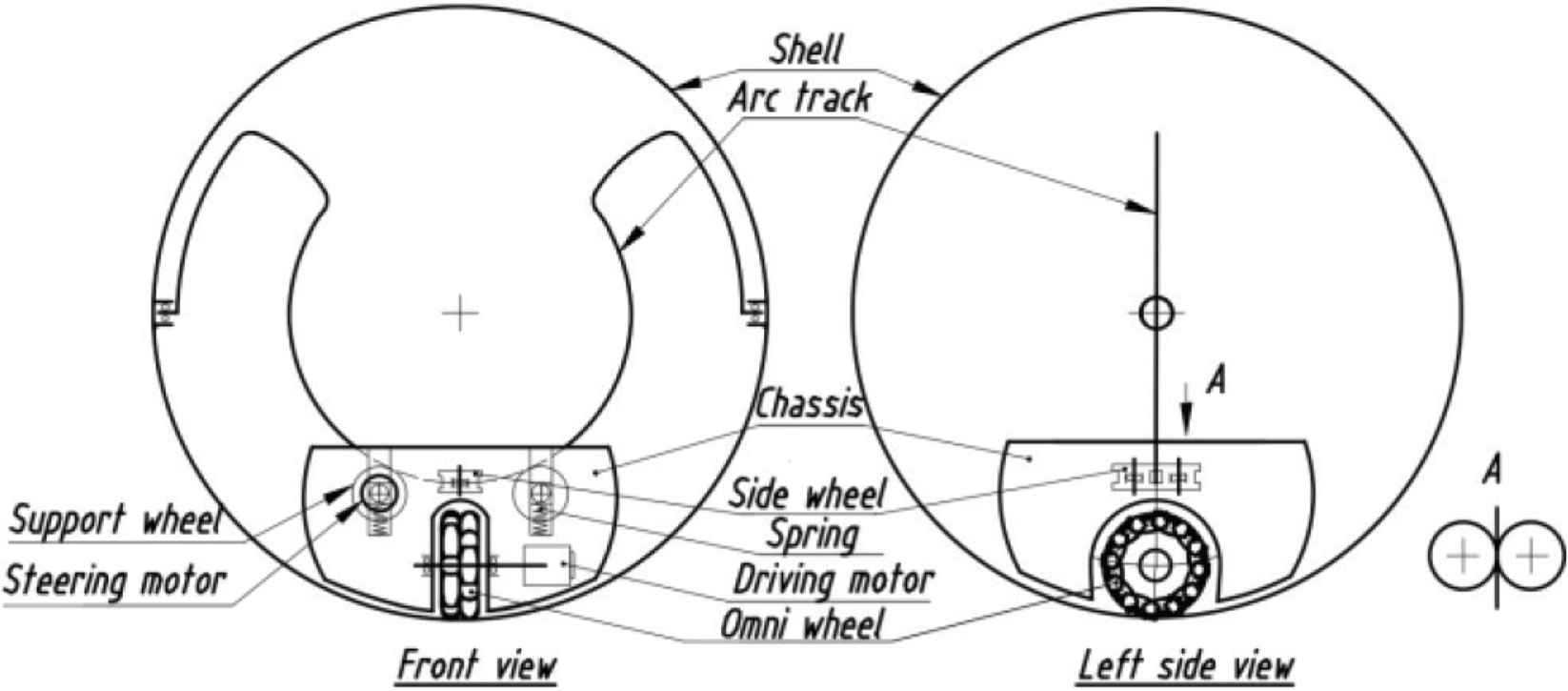
Drive mechanism of single omni wheel.
3. FUNCTION ANALYSIS
The robot has two moving functions, rolling function and turning function. The rolling function is shown in Figure 4. When driving motor starts up, the spring force and the gravity of drive assembly under arc track provide friction to let the moving parts climbing the inner spherical shell, and then the eccentric mass provides the eccentric torque to roll the spherical shell forward or backward. The side wheels can keep the drive assembly in stable and reduce the friction to arc track when the drive assembly moving along the arc track, that is the omni wheel can always touch the inner surface of the spherical shell. When steering motor starts up, the support wheels run along the arc track to drive the chassis and its drive assembly left or right, and at the same time the omni wheel will slide laterally, so the eccentric mass provides the eccentric torque to turn the spherical shell turning left or right. Driving motor and steering motor can operate simultaneously, they don’t interfere with each other. The turning function is shown in Figure 4. The driving motor turns the mass center α angle and produces the eccentric torque to roll the spherical robot forward. The steering motor turns the mass center β angle and produces the eccentric torque to turn the spherical robot left.
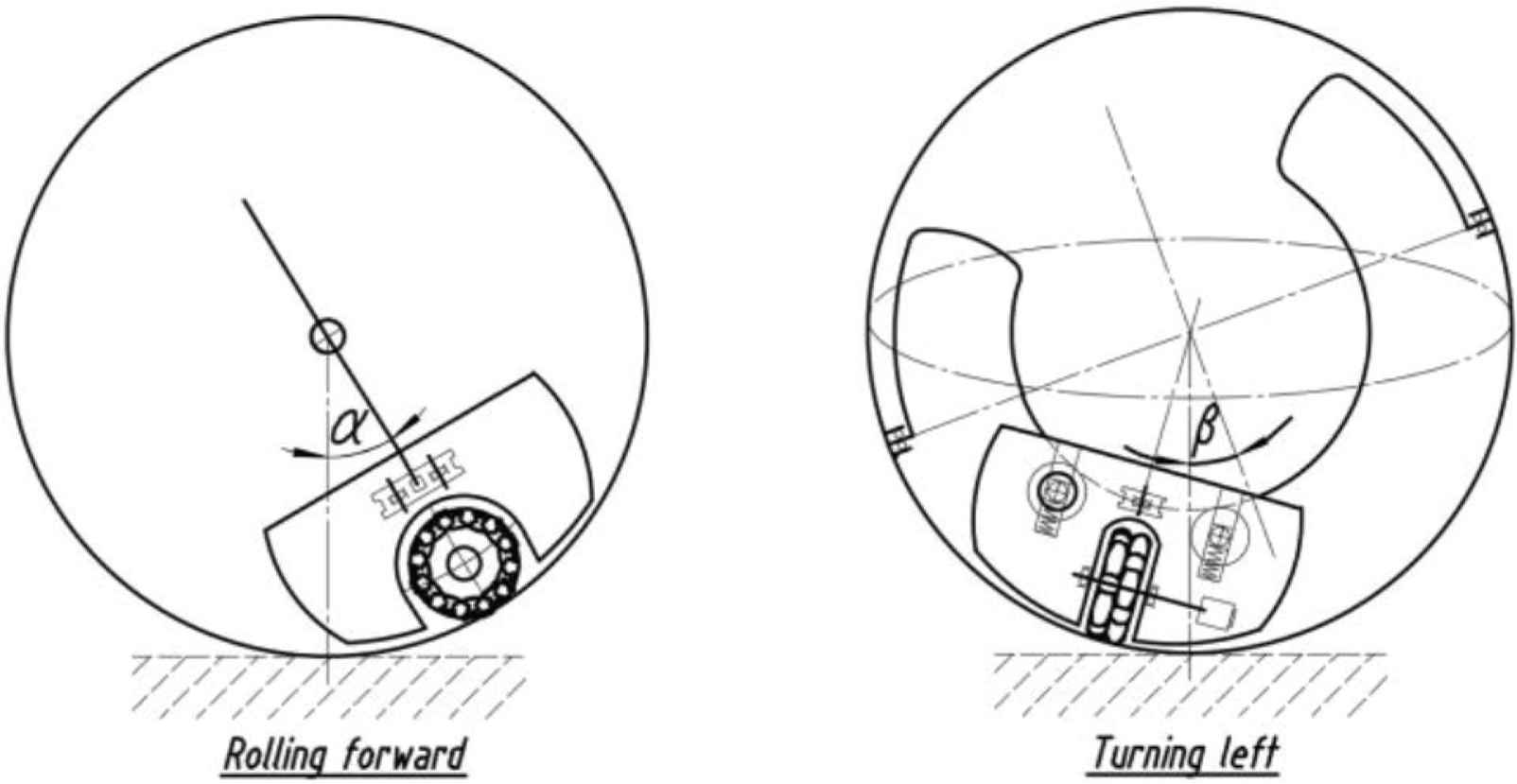
Driving pose and steering pose.
4. COORDINATE SYSTEMS
Built the coordinate systems is the first step to do the analysis of the kinematics and dynamics. The coordinate system W-XYZ is attached on the ground, and the coordinate system S-XYZ is established on the center of spherical robot. The A-XYZ is the arc track coordinate system located at the sphere center. The O-XYZ is the omniwheel coordinate system. The O-XYZ slides or rotates along the A-XYZ. The A-XYZ rotates around the S-XYZ. The S-XYZ rolls on the W-XYZ. The relationship built between the coordinate systems is shown in Figure 5. That is the fundamental to simplify the analysis of the kinematics and dynamics.
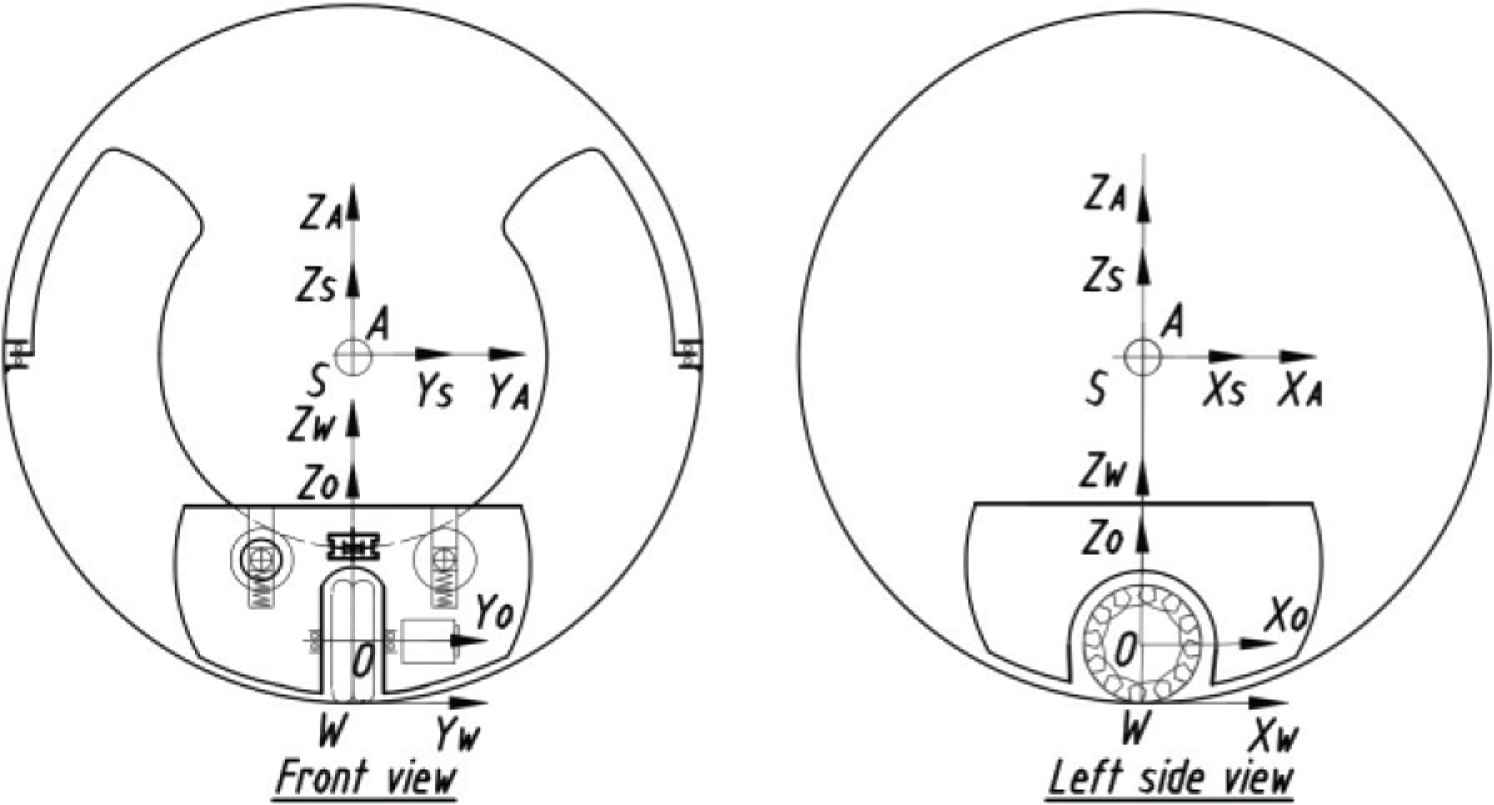
The relationship of the coordinate systems.
5. CONCLUSION
The mechanism of the spherical robot takes advantage of the characteristics of the omni wheel, and it combines the driving and steering together in the simplest way. The spherical robot lowers the center of drive assembly gravity which can generate the maximized eccentric driving torque. The simulation with the mechanical dynamic analysis software ADAMS shows that the mechanism can facilitate the motion toward any direction successfully, and it has a variety of good motion capabilities, such as obstacle crossing, jumping, small radius steering etc. As the ends of arc track limit the lateral sliding of the omni wheel, its steering function is a little bit weak and more behaviors of the spherical mobile robot will be explored further.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
ACKNOWLEDGMENTS
This research was funded by
Authors Introduction
Dr. Liu Wei
 He received his PhD from Beijing Jiaotong University, P. R. China in 2005. He is an associate professor in the Mechanical Engineering Department, School of Mechanical, Electronic and Control Engineering, Beijing Jaotong University. His main research interests are mechanical design, optimization applications and computer graphics. In recent years, he interests in the novel spherical robot.
He received his PhD from Beijing Jiaotong University, P. R. China in 2005. He is an associate professor in the Mechanical Engineering Department, School of Mechanical, Electronic and Control Engineering, Beijing Jaotong University. His main research interests are mechanical design, optimization applications and computer graphics. In recent years, he interests in the novel spherical robot.
Mr. Runjiao Wang
 Runjiao Wang is currently studying toward the master’s degree in Engineering at School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, P. R. China. His research interests include mechanical design and theory, with a particular focus on simulation-based mechanical optimization design.
Runjiao Wang is currently studying toward the master’s degree in Engineering at School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, P. R. China. His research interests include mechanical design and theory, with a particular focus on simulation-based mechanical optimization design.
Mr. Lunqin Duan
 Lunqin Duan graduated from Beijing Jiaotong University with a master’s degree in mechanical design and theory. His research interests include mechanical transmission and structure design, especially the research on the transmission performance of herringbone gears.
Lunqin Duan graduated from Beijing Jiaotong University with a master’s degree in mechanical design and theory. His research interests include mechanical transmission and structure design, especially the research on the transmission performance of herringbone gears.
Mr. Yanyan Wang
 Yanyan Wang has graduated with the master’s degree in School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, P. R. China. His research interests include mechanical and electrical equipment system design, with a particular focus on study on root fracture of wind turbine blade.
Yanyan Wang has graduated with the master’s degree in School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, P. R. China. His research interests include mechanical and electrical equipment system design, with a particular focus on study on root fracture of wind turbine blade.
Prof. Jiwu Wang
 Wang Jiwu is now working in Beijing Jiaotong University, P. R. China. His main research is in the field of Mobile robot, Intelligent control, Image processing etc.
Wang Jiwu is now working in Beijing Jiaotong University, P. R. China. His main research is in the field of Mobile robot, Intelligent control, Image processing etc.
REFERENCES
Cite this article
TY - JOUR AU - Liu Wei AU - Wang Runjiao AU - Duan Lunqin AU - Wang Yanyan AU - Wang Jiwu PY - 2019 DA - 2019/12/10 TI - Spherical Mobile Robot Driven by Single Omni Wheel JO - Journal of Robotics, Networking and Artificial Life SP - 167 EP - 170 VL - 6 IS - 3 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.191202.003 DO - 10.2991/jrnal.k.191202.003 ID - Wei2019 ER -