
A Textural Distributions-Based Detection of Hazelnut Axial Direction
 , Songyu Luan2, Lili Wang2, Johnkennedy Chinedu Ndubuisi1, Xian Wu1,
, Songyu Luan2, Lili Wang2, Johnkennedy Chinedu Ndubuisi1, Xian Wu1, - DOI
- 10.2991/ijcis.d.201207.002How to use a DOI?
- Keywords
- Discrete paths; Projection histogram; Adaptive circle; Template matching
- Abstract
Since the shell of the hazelnuts is very hard, it is necessary to squeeze the slit in the axial direction to facilitate peeling. When the hazelnuts are automatically processed in the industry chain, the axial of the hazelnuts needs to be quickly positioned. In this paper, the sum of projection gradient in the sensitive area of the hazelnut image is used to locate the hazelnuts axial. Firstly, a search template with discrete paths is established to find the hazelnut contour and extract the hazelnut region from the image. Secondly, the sensitive area is selected to get projection histogram at diffident orientations, and then the gradient sums of the projection histograms are calculated. Thirdly, the axial orientation of the hazelnut is determined with the biggest sum. The experiments results show that the projection gradient sum method is fast enough and can meet the requirements of industrial production. The location accuracy of the projection gradient sum method is 94.2%.
- Copyright
- © 2021 The Authors. Published by Atlantis Press B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Hazelnut is one of the best favorite snacks for consumers with high nutritional value and good taste. Presently, the mechanical crack is often adopted to process the hazelnut for food. To get a better crack effect, hazelnuts needs to be manually located on the production line so that it can be cracked along its axial orientation. The manual operation has two disadvantages: low locating efficiency and high labor costs. At present, the technology of machine vision and mechanical control are usually combined in the production line to improve the intelligence of the production and save labor costs.
The application of machine vision inspection technology has been widely studied in many fields, such as electronics [1,2], metallurgical [3,4], pharmaceutical [5], agricultural [6], fabric [7], and rail traffic [8,9]. The recognition technology based on the texture features have been researched by many scholars. Chen et al. adopted Bayesian data fusion technology to achieve automatic detection of metal surface cracks [10], Dutta et al. used texture analysis and supports vector regression to perform on-line tool prediction of flank wear from machined surface images [11], Hu used the optimal elliptical Gabor filter to automatically detect the defects in texture surface [12], Yuan and Sun proposed fingerprint texture detection based on histogram of oriented gradient [13], Fan et al. used texture regression via conformal mapping to locate the 3D facial landmark [14], Miao et al. studied on asphalt pavement surface texture degradation using 3D image processing techniques and entropy theory [15], Susan and Sharma used Gaussian mixture entropy model to detect texture automatically [16], Teo and Abdullah used local texture analysis and Support vector machine (SVM) to detect solar cell micro-crack [17], Yang et al. proposed a method for detecting egg stains based on local texture feature clustering [18].
With the development of big data technology, machine learning has been widely used in vision system and laser imaging. Arun and Nath proposed a machine learning method for automated cashew grading system using external features like color, texture, size, and shape [19]. Woźniak and Połap used hybrid models of neural network and heuristic techniques to detect fruit peel defects [20]. In Castaño et al. [21,22], several artificial intelligence-based methods for obstacle recognition libraries are designed and applied using data collected by LiDAR sensors. In addition, many deep learning models have been successfully applied to fruit detection and location [23].
In the previous works, some methods related to the task of hazelnut detection have been proposed. Onaran et al. proposed a method to detect empty hazelnuts based on the analysis of the acoustic signal generated from the impact of the nut on a steel plate [24]. Khosa and Pasero proposed an X-Ray-based system for the classification of healthy and unhealthy hazelnuts [25]. In Caro et al. [26], a method for the inline quality evaluation of the inshell hazelnuts, based on Time-domain nuclear magnetic resonance (TD-NMR) analysis, has been proposed. However, these sensing systems are expensive and require a high computational cost.
As stated above, machine vision can be used for hazelnut axis location. It is noteworthy that although machine learning methods perform well in many tasks of machine vision, large amounts of data are needed to ensure the generalization performance [27]. It is clearly foreseen that the performance of machine learning will be greatly reduced caused by the lack of available hazelnut samples. In addition, due to the complexity of these models, higher requirements are put forward for the supported hardware [28]. In comparison with machine learning methods, the method of hazelnut axis location based on surface texture features is promising. The surface textures of the hazelnut are random and variable because of its nature which puts high requirement on the robustness of the location algorithm.
To this end, our main contributions are listed as follows:
A fast extraction method of the hazelnut image based on the radially discrete search paths is proposed.
A novel method is proposed to locate hazelnuts axial orientation based on the texture characteristics of hazelnuts.
In order to improve the robustness and efficiency, an adaptive circle is used to select the appropriate projection area.
The rest of this article is organized as follows. Section 2 explains the extraction and binarization of the hazelnut image. Section 3 shows the method of projection gradient statistics. Section 4 discusses the proposed method. A brief conclusion is finally given in Section 5.
2. THE EXTRACTION AND BINARIZATION OF THE HAZELNUT IMAGE
As shown in Figure 1a, the color of hazelnut placed on the production line is different from the background area. The image of the hazelnut is collected by high-precision industrial camera. According to the different brightness values of the hazelnut image and the background area, a fast extraction method of the hazelnut image based on the radially discrete search paths is proposed as following.
The average pixel value of the hazelnut image and its background area,
Where
A search template based on radially discrete paths is established. The center of the image is considered as the origin point as shown in Figure 1b. The coordinates and storage forms of the points lies on the radial search paths include:
Firstly, the coordinates of the points lie on the radial search paths are derived from the following formulas:
Where
Secondly, the search template is characterized by a three-dimensional array
Thirdly, the hazelnut image is detected with this template, and the search is performed along each radially discrete path to find the points lies on the hazelnut edge. The search formula is:
Where
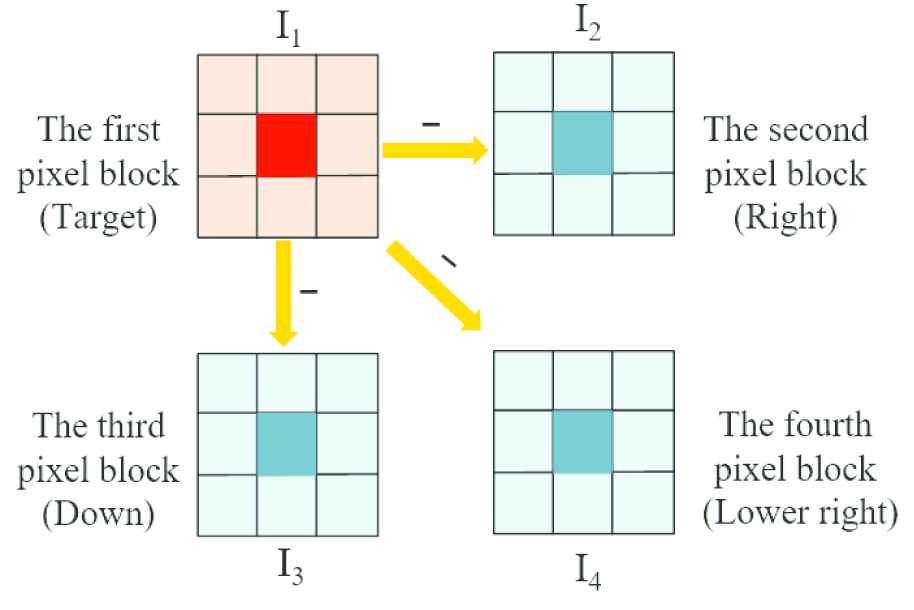
In order to observe the surface texture of the hazelnut more clearly, a binary filtering algorithm based on texture characteristics is used. As shown in Figure 2, the adjacent three
Where
The hazelnut image, as shown in Figure 1c, is binarized processed with the above adjacent
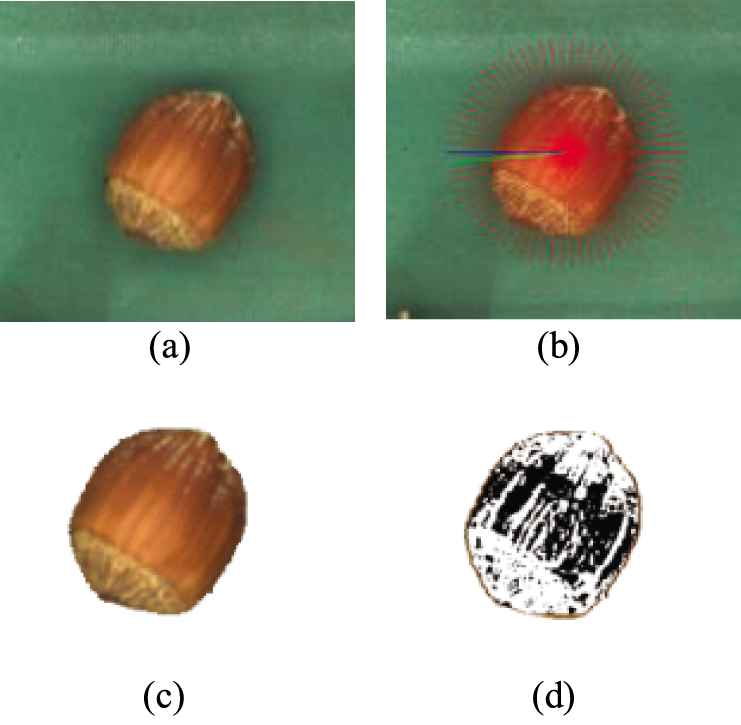
Preprocessing of hazelnut images: (a) The original image, (b) Discrete path search template, (c) Hazelnut image extraction, (d) Binarization of the hazelnut image.
Binary diagram.
3. THE METHOD OF PROJECTION GRADIENT STATISTICS
Figure 3 shows the flow of the projection gradient statistics. After binarizing the hazelnut image, an adaptive circle is used to extract the projection area of the hazelnut. Then the projection gradient statistical method is used to detect the axial direction of the hazelnut.
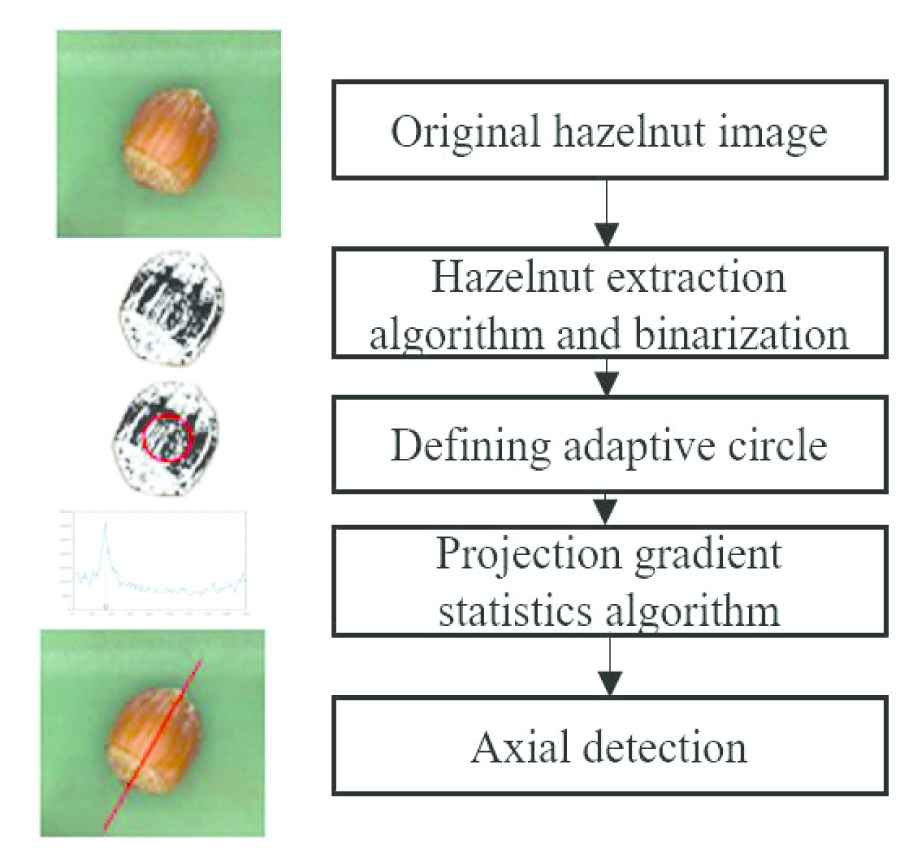
Image processing flow.
3.1. The Extraction of Projection Area
It is necessary to select the appropriate projection area to improve the robustness and efficiency. An adaptive circle is used to select the central part of hazelnut image since the texture in this part is much clearer as showed in Figure 4. The center point of the adaptive circle is set on the center of gravity of the hazelnuts, the diameter of adaptive circle is analyzed to find the optimal value
The center of gravity of the hazelnuts can be calculated according to the coordinate values of the hazelnuts image after binarization. The coordinate value
By searching for the coordinate points of the hazelnuts edge, the two coordinate points lie on the longest distance are obtained, defined as
The shrinkage ratio is defined as
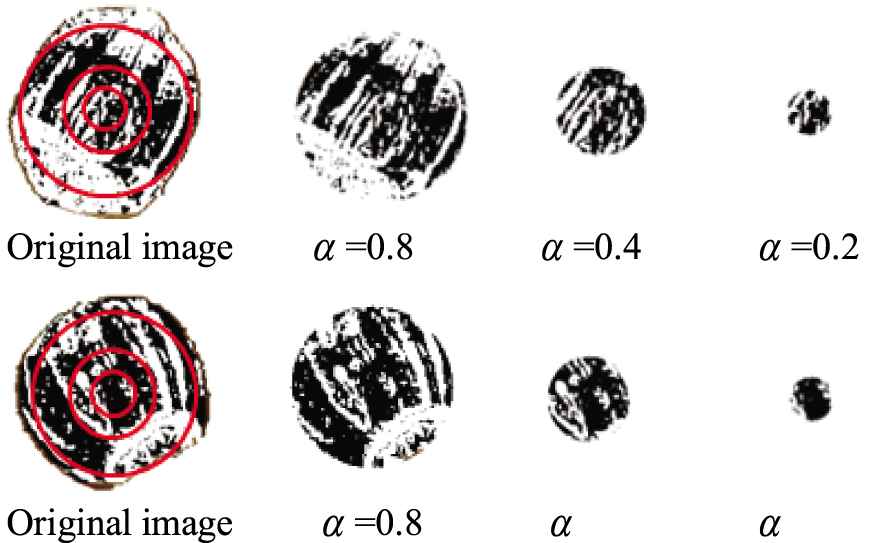
The extracted projection region with different
| 1 | 6° | 3° | 1° | 0° | 37° |
| 2 | 3° | 1° | 1° | 0° | 17° |
| 3 | 0° | 0° | 0° | 0° | 10° |
| 4 | 5° | 4° | 2° | 1° | 20° |
| 5 | 0° | 0° | 0° | 0° | 35° |
| 6 | 0° | 0° | 0° | 0° | 2° |
| 7 | 4° | 2° | 1° | 0° | 3° |
| 8 | 4° | 1° | 1° | 0° | 18° |
| 9 | 6° | 4° | 1° | 2° | 7° |
| 10 | 1° | 1° | 0° | 0° | 52° |
The angle deviation with different
3.2. Projection Histogram Statistical Calculation
For the extracted projection area of the hazelnuts, the projection process can be expressed by the following formula [31].
Where
Since the binarization image is discrete, Equation (13) can be rewritten to Equation (14), where
Where
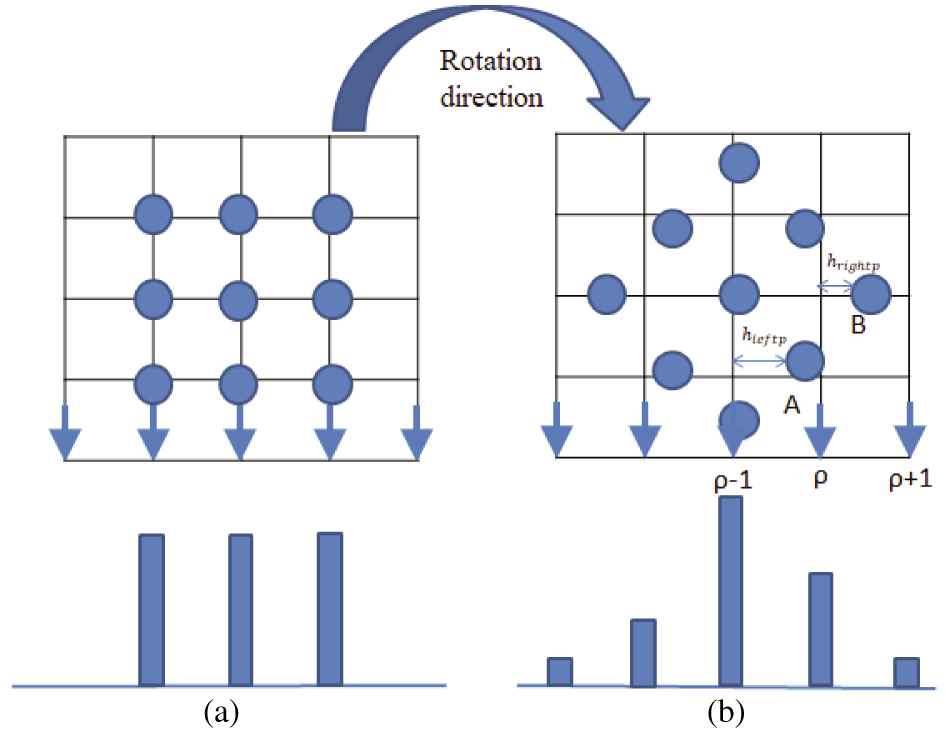
Projective histogram demonstration.
Figure 5 shows a
According to the rule shown in Equation (14), for a certain projection area, the image is rotated 180 times with a 1° rotation interval, so 180 projection histograms are obtained. Figure 6 shows several typical projection histograms.
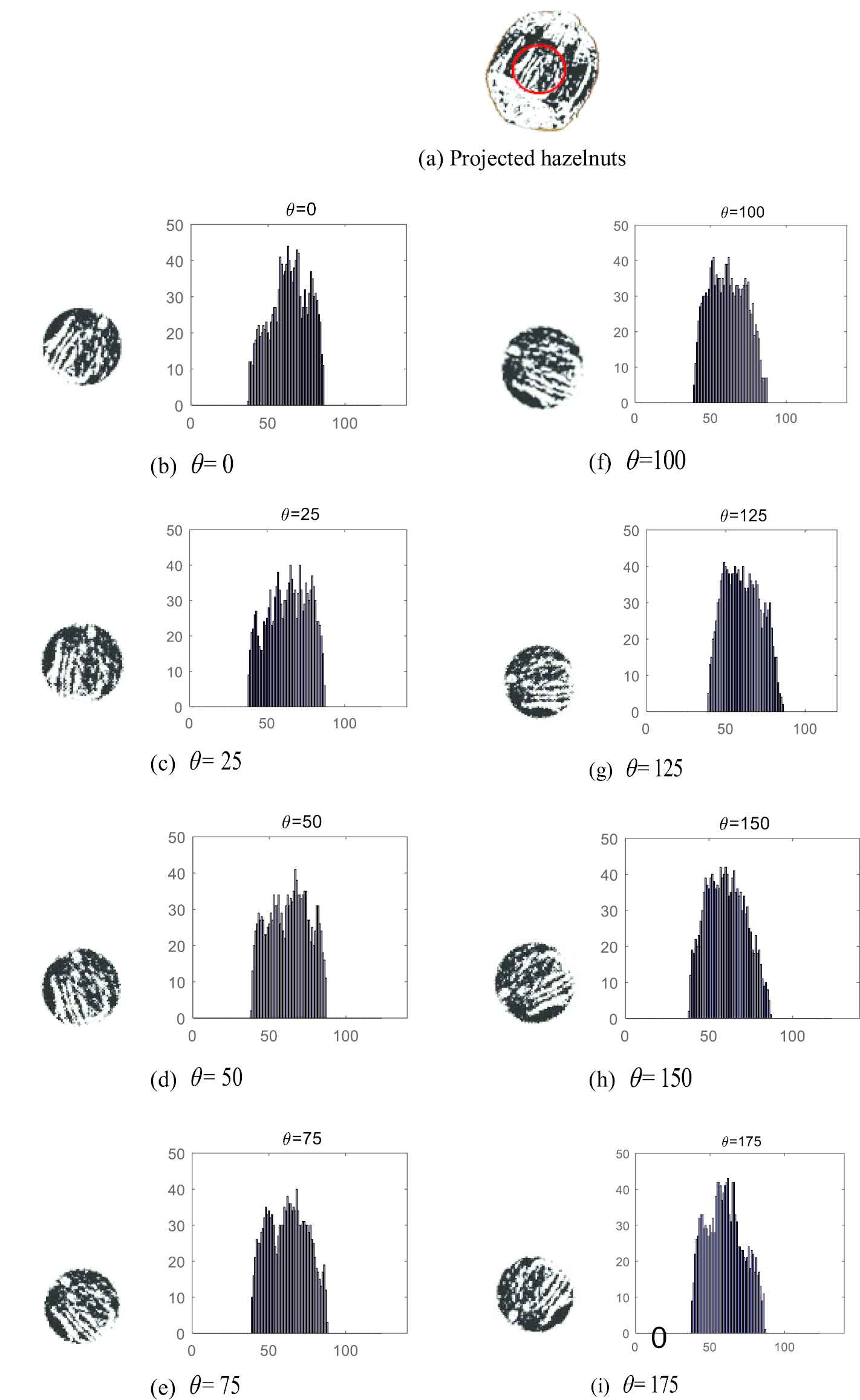
Projection histograms with different rotation angle.
For the same area surrounded by the adaptive circle, different projection angles correspond to different projection histograms.
In order to find the relationship between projection histogram and the axial orientation of the hazelnuts, we calculate the gradient sum S of projection histogram.
The gradient sum S of projection histogram is defined as the sum of absolute values of
The gradient sums of 180 projection histograms S are calculated and the functional curve of S versus rotation angel is showed in Figure 7d. The calculated results give the rotation angel of the axial orientation of hazelnut when S reach its peak value. In this case, the axial angle is 33°.
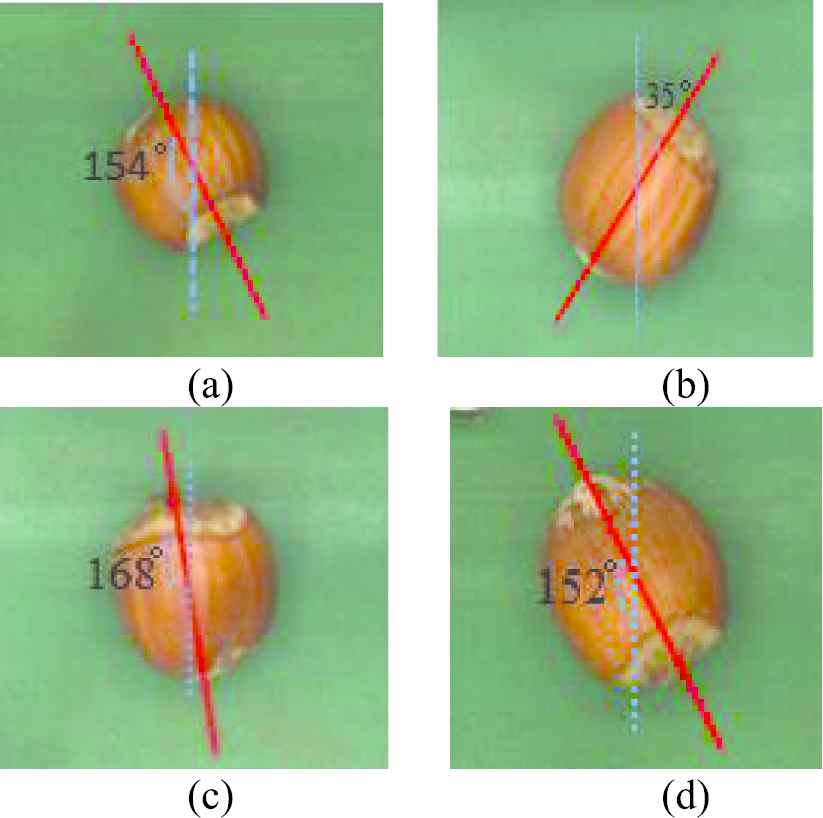
1000 hazelnuts images are taken for axial recognition. As shown in Table 2, the accuracy of the hazelnut image without and with adaptive circle is 72% and 94% respectively. Therefore, the method using adaptive circle extraction greatly improves the recognition accuracy. Figure 8 shows the recognition results of different hazelnuts when S reach its peak value.
4. EXPERIMENTS AND ANALYSIS
In addition to the projection gradient statistics, we also designed another feasible algorithm. This section will introduce the implementation of the algorithm and the comparison of the two methods.
4.1. Template Matching Algorithm
| Error | Correct | Accuracy (%) | |
|---|---|---|---|
| Without extraction | 280 | 720 | 72 |
| Extraction with adaptive circle | 60 | 940 | 94 |
The accuracy of hazelnuts axial recognition.
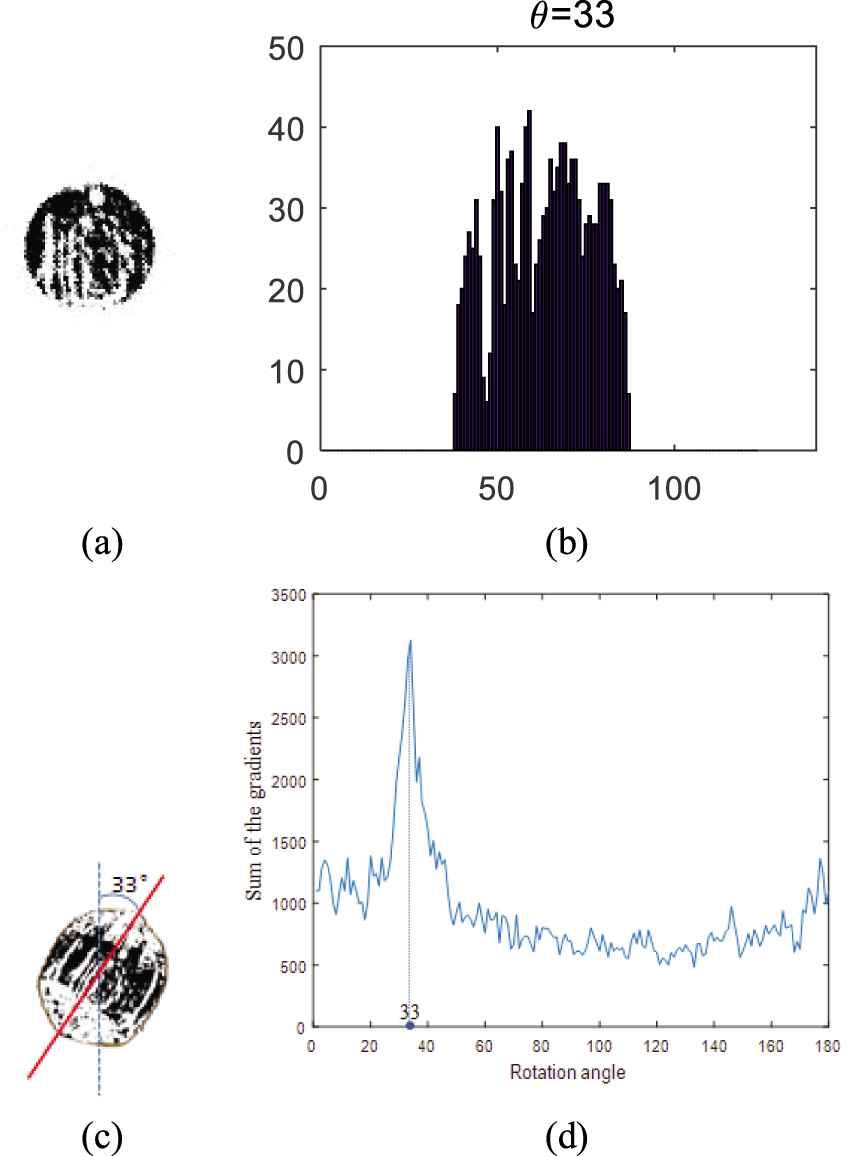
The projection histogram and recognition result: (a) the projection area, (b) projection histogram, (c) the result of axial detection, (d) the gradient sum of projection histogram.
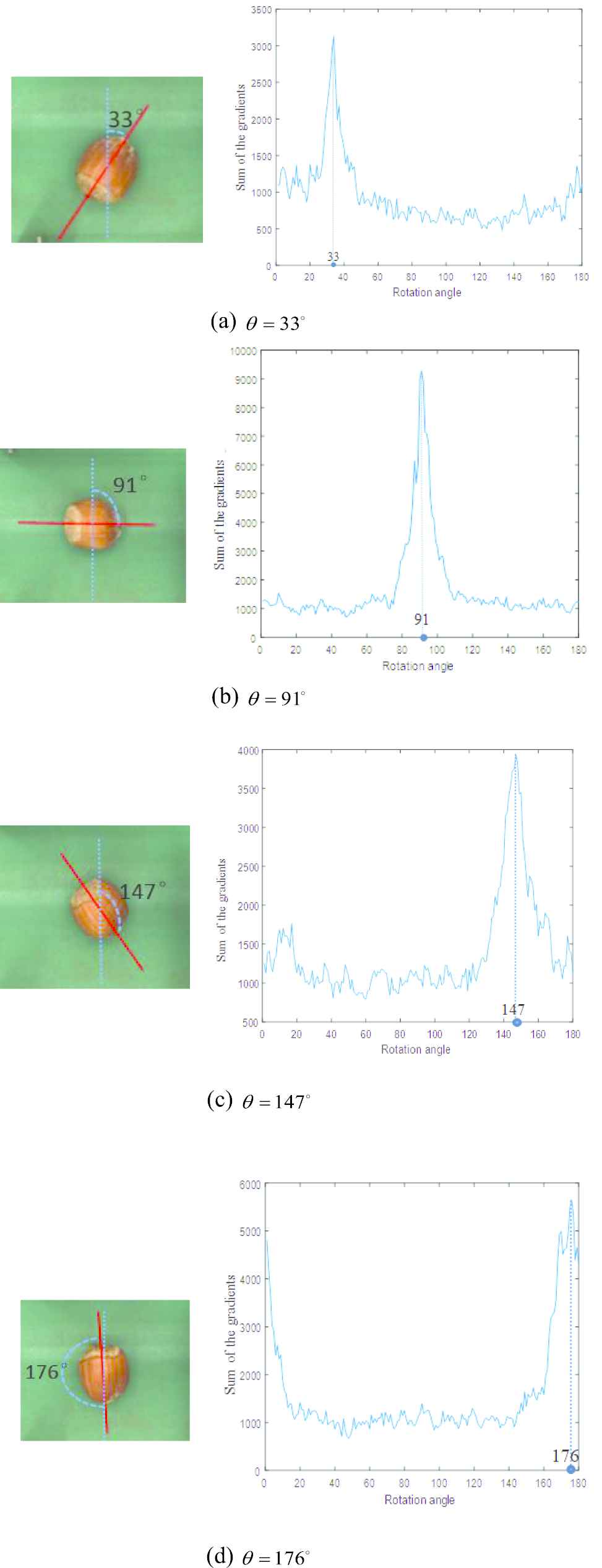
The recognition results of hazelnut axial orientation.
Figure 9 shows the diagram of the template matching method. After binarizing the hazelnut image, a rectangular stripe template is established based on the characteristics of the hazelnut image. Then the template is rotated to calculate the convolution results of template and detected images.
4.1.1. The establishment of rectangular stripe template
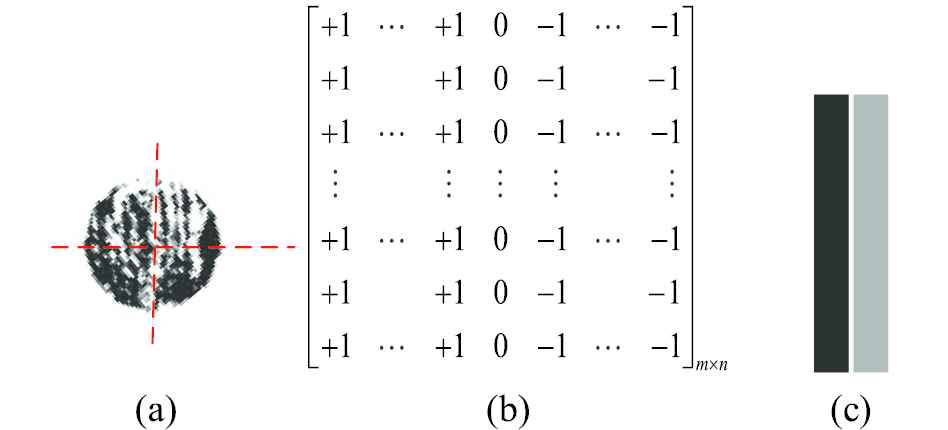
As we all know, only when hazelnut is in the long axis direction, the vertical gradient is the smallest, and the horizontal gradient is the largest, as shown in Figure 10a. Inspired by Prewitt operator [32], we devised a novel stripe templates to detect the horizontal gradient during rotation. Moreover, to improve the robustness of the stripe templates, we set the size of the template matrix to
As shown in Figure 10c, the black and the gray column corresponds to the black part and the white part of the binarized hazelnut images, respectively. In the template matrix as shown in Figure 10b, +1, −1, 0 is used to represent the value of black, the gray, and middle part in Figure 10c. The optimal length of row and column in the template matrix is decided by the convolution results as shown in Table 3. In this paper, the optimal length of template matrix row and column are 50 and 9,
4.1.2. The discussion of optimal template size and axial recognition results
The rectangular stripe templates are obtained with 1° rotation interval, and parts of the template is showed in Figure 11.
The binarized hazelnut image is sequentially convoluted by the obtained 180 rectangular stripe templates as shown in Equation (21),
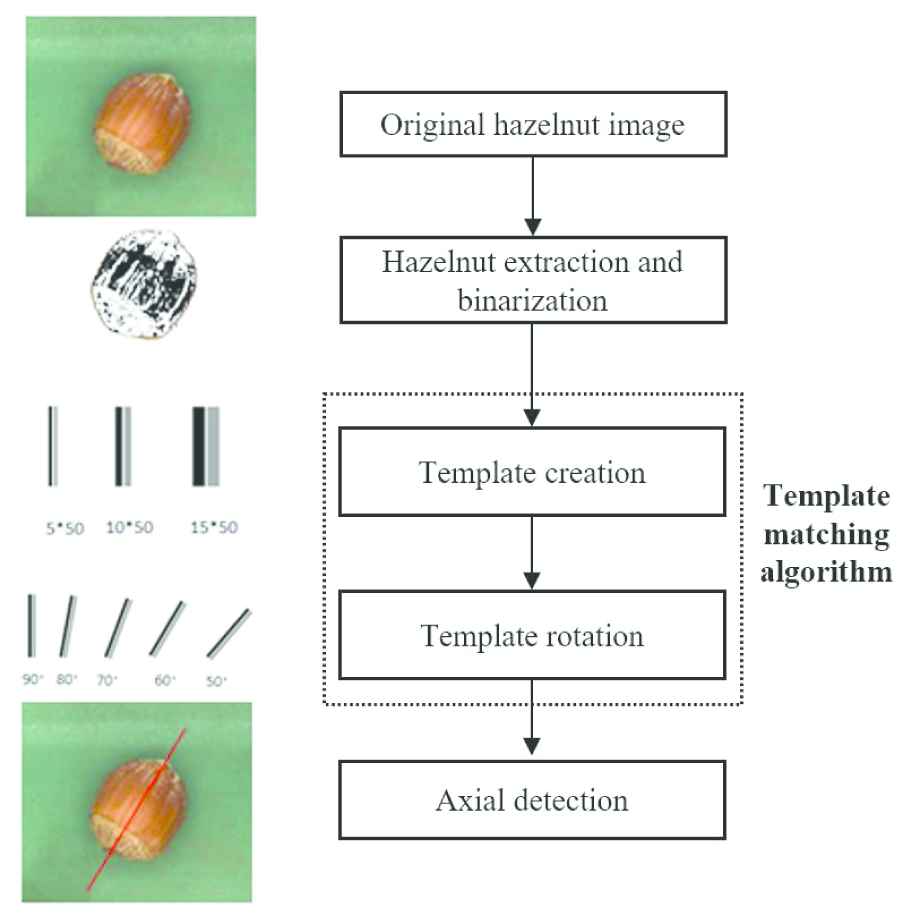
Image processing diagram.
(a) The vertical and horizontal directions of hazelnuts, (b) Template matrix, (c) Rectangular stripe template.
| Template Size | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | Average |
|---|---|---|---|---|---|---|---|---|---|
| 5*40 | 1° | 2° | 10° | 3° | 7° | 2° | 14° | 4° | 7° |
| 9*40 | 5° | 4° | 7° | 3° | 2° | 6° | 1° | 16° | 5.5° |
| 15*40 | 5° | 21° | 36° | 6° | 65° | 7° | 19° | 31° | 23.75° |
| 5*50 | 5° | 17° | 26° | 9° | 21° | 4° | 6° | 5° | 11.63° |
| 9*50 | 1° | 2° | 0° | 1° | 1° | 0° | 3° | 0° | 1° |
| 15*50 | 15° | 19° | 10° | 65° | 2° | 25° | 6° | 32° | 21.75° |
| 5*60 | 10° | 5° | 3° | 11° | 4° | 2° | 15° | 4° | 6.75° |
| 9*60 | 15° | 7° | 8° | 3° | 5° | 2° | 3° | 1° | 5.5° |
| 15*60 | 25° | 9° | 15° | 36° | 5° | 14° | 9° | 74° | 23.4° |
The detected angle error of hazelnut axial direction with different template size.
Where
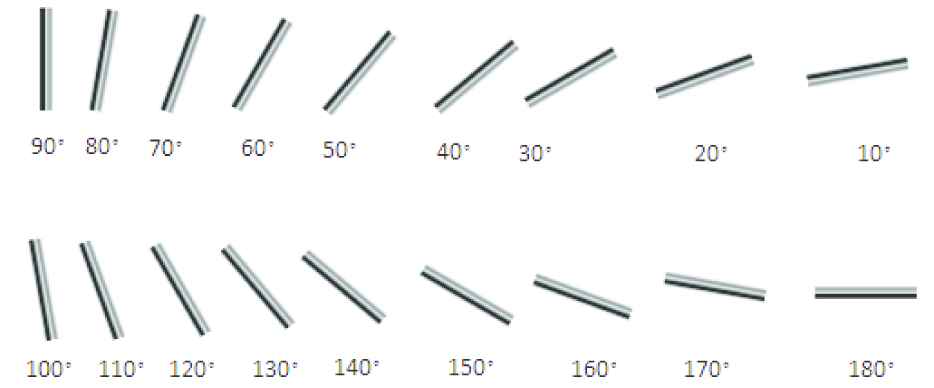
Rectangular stripe template with different rotation angles.
Figure 12 shows rectangular stripe templates with different size, the template with size of 5*40 in the figure means that the length and width of the template are 5 and 40 pixel points, respectively. The convolution results show that optimal recognition accuracy is obtained when the template size is 9*50, as shown in Table 3. The average angle error of hazelnut axial direction is 1° when the template size is 9*50. Whereas the average angle error is up to 23.75° when the template size is 15*40. Figure 13 shows the recognition results of different hazelnuts when
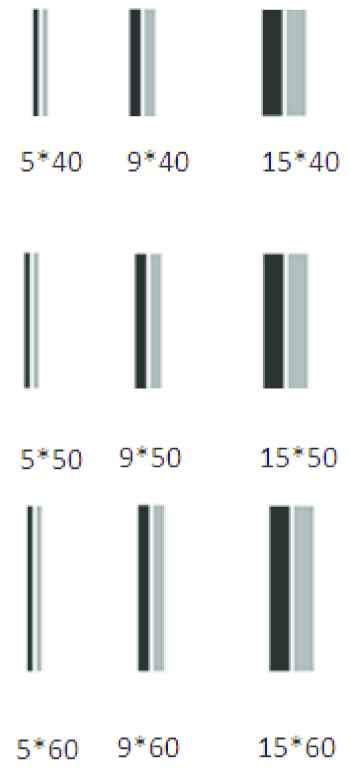
Rectangular stripe templates with different size.
The recognition results of hazelnut axial direction with template matching.
4.2. Comparison and Experiments
The hardware configurations of Personal computer (PC) used in the experiments is Intel Dual-Core 3.0 GHz CPU, 8G RAM, and the used calculation software is C#. 10 groups of hazelnut samples were randomly selected, and each group contained 100 hazelnut images with different poses. The axial direction of 1000 hazelnuts images were detected by the projection gradient statistics and template matching, and the recognition time of each group was recorded in Table 4. The time used by projection gradient statistics and template matching methods, is labeled with (Projection/Template) respectively. Form the Table 4, we know that the average time of projection gradient statistics and template matching methods are 45.4 ms and 89.6 ms, respectively. Compared with projection gradient statistics, the speed of template matching calculation is longer due to the repeated calculation of pixel points when setting step length. That is why we choose the projection gradient statistics method.
| Label | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Template (ms) | 87.7 | 88.6 | 94.3 | 90.7 | 86.5 | 85.2 | 88.1 | 92.1 | 93.2 | 90.3 | 89.6 |
| Projection (ms) | 46.7 | 48.6 | 44.3 | 45.7 | 46.8 | 45.6 | 47.1 | 44.1 | 43.2 | 42.3 | 45.4 |
The comparison of time costs.
Apart from the time cost, we also studied the accuracy of the two methods. As shown in Table 5, 1000 hazelnuts images were detected in our experiments to confirm the recognition accuracy with two methods, the recognition accuracy are 88.6% and 94.2%, respectively. In summary, the two parameters recognition time and accuracy of the projection gradient statistics is much better than template matching method.
| Error | Correct | Accuracy (%) | |
|---|---|---|---|
| Projection gradient statistics | 58 | 942 | 94.2 |
| Template matching method | 114 | 886 | 88.6 |
The comparison of the recognition accuracy.
5. CONCLUSION
This paper proposes an innovative method to recognize the axial direction of hazelnut based on machine vision. The sum of the absolute values of each histogram gradients are calculated based on binarized hazelnut image. In addition, the method of template matching is discussed. In this method, a rectangular stripe template is established and the rotated template is convoluted by binarized hazelnut image. The recognition results of the two methods are compared with the parameter of recognition time and accuracy.
CONFLICT OF INTEREST
The authors declare that they have no competing interests.
AUTHORS' CONTRIBUTIONS
All authors contributed to the work. All authors read and approved the manuscript.
ACKNOWLEDGMENTS
This research is financially supported by the National Key R&D Program of China (No. 2019YFB1405500), Natural Science Foundation of China (61877065), and Liaoning Province Natural Science Foundation (No.2019-KF-23-08).
REFERENCES
Cite this article
TY - JOUR AU - Wenju Zhou AU - Fulong Yao AU - Songyu Luan AU - Lili Wang AU - Johnkennedy Chinedu Ndubuisi AU - Xian Wu PY - 2020 DA - 2020/12/11 TI - A Textural Distributions-Based Detection of Hazelnut Axial Direction JO - International Journal of Computational Intelligence Systems SP - 358 EP - 366 VL - 14 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.d.201207.002 DO - 10.2991/ijcis.d.201207.002 ID - Zhou2020 ER -